汽车工程 ›› 2022, Vol. 44 ›› Issue (5): 656-663.doi: 10.19562/j.chinasae.qcgc.2022.05.002
所属专题: 智能网联汽车技术专题-规划&控制2022年
余嘉星1,2,Aliasghar Arab2,裴晓飞1( ),过学迅1
),过学迅1
Jiaxing Yu1,2,Arab Aliasghar2,Xiaofei Pei1(),Xuexun Guo1
摘要:
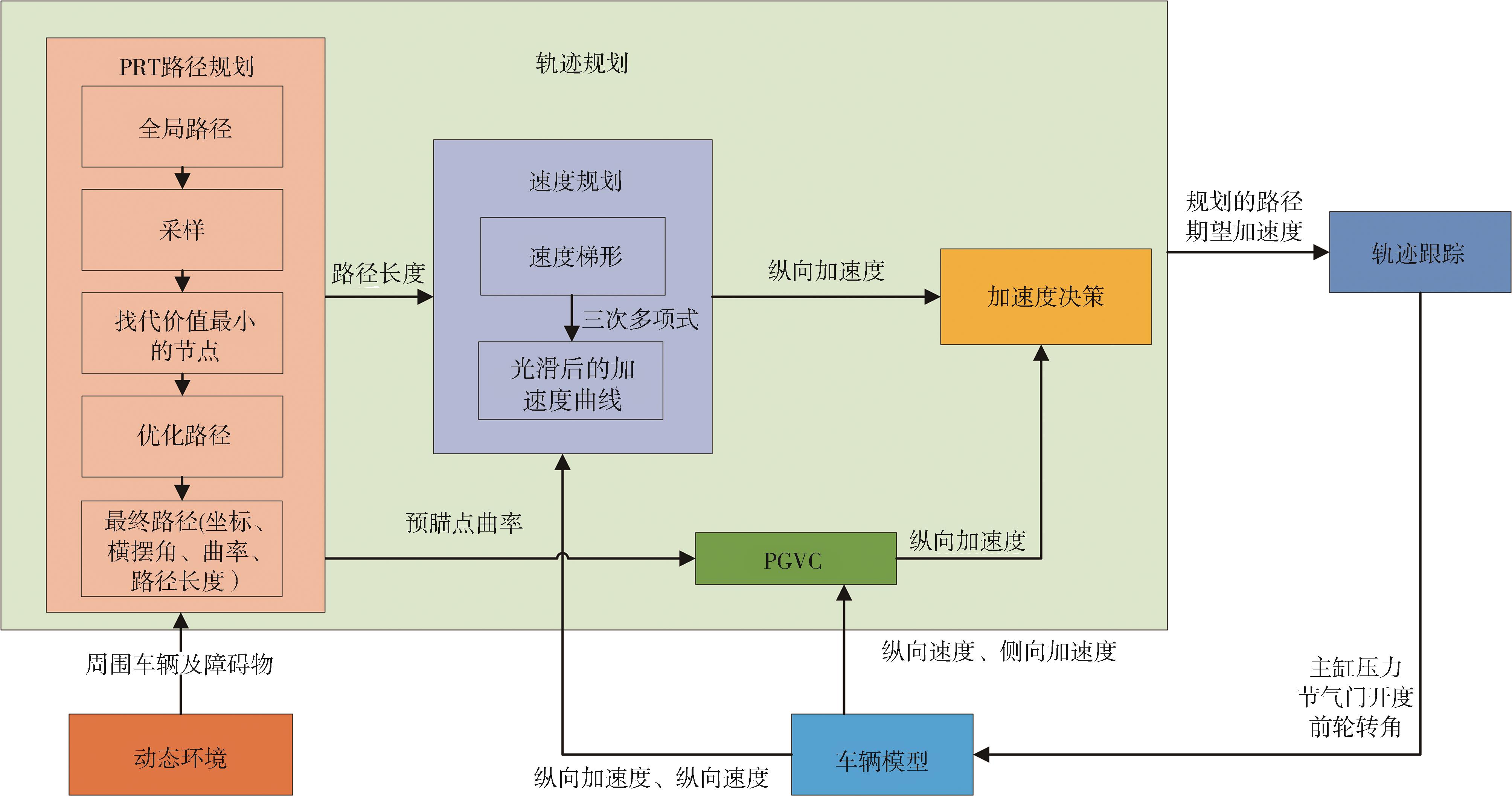
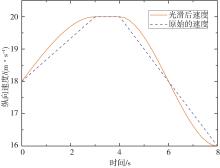
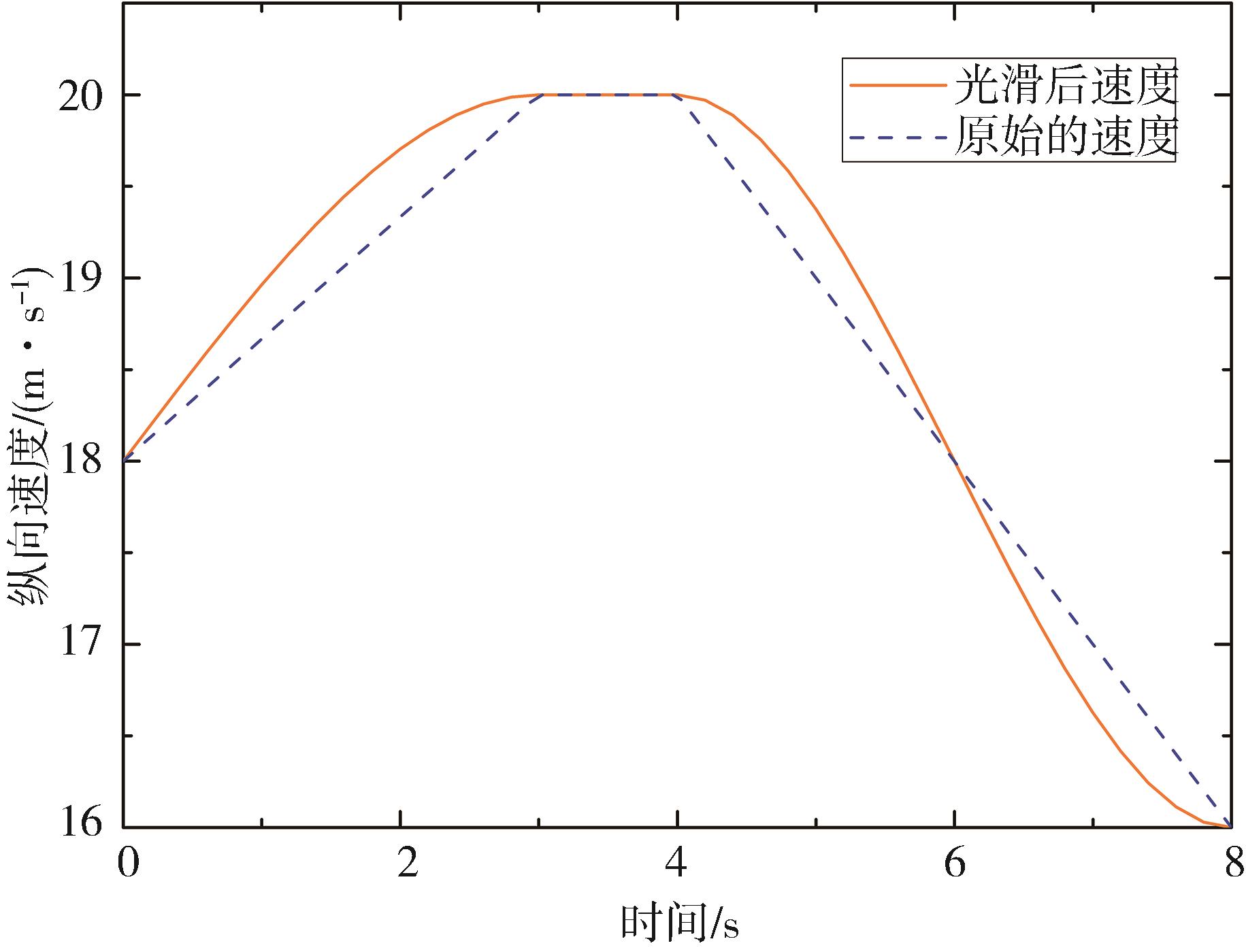
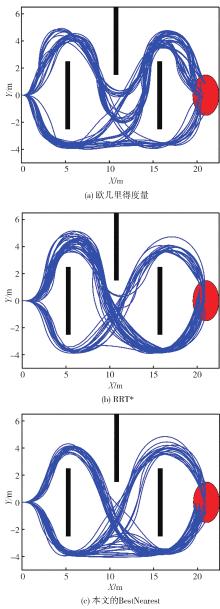
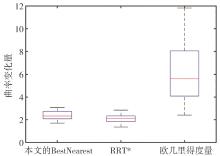
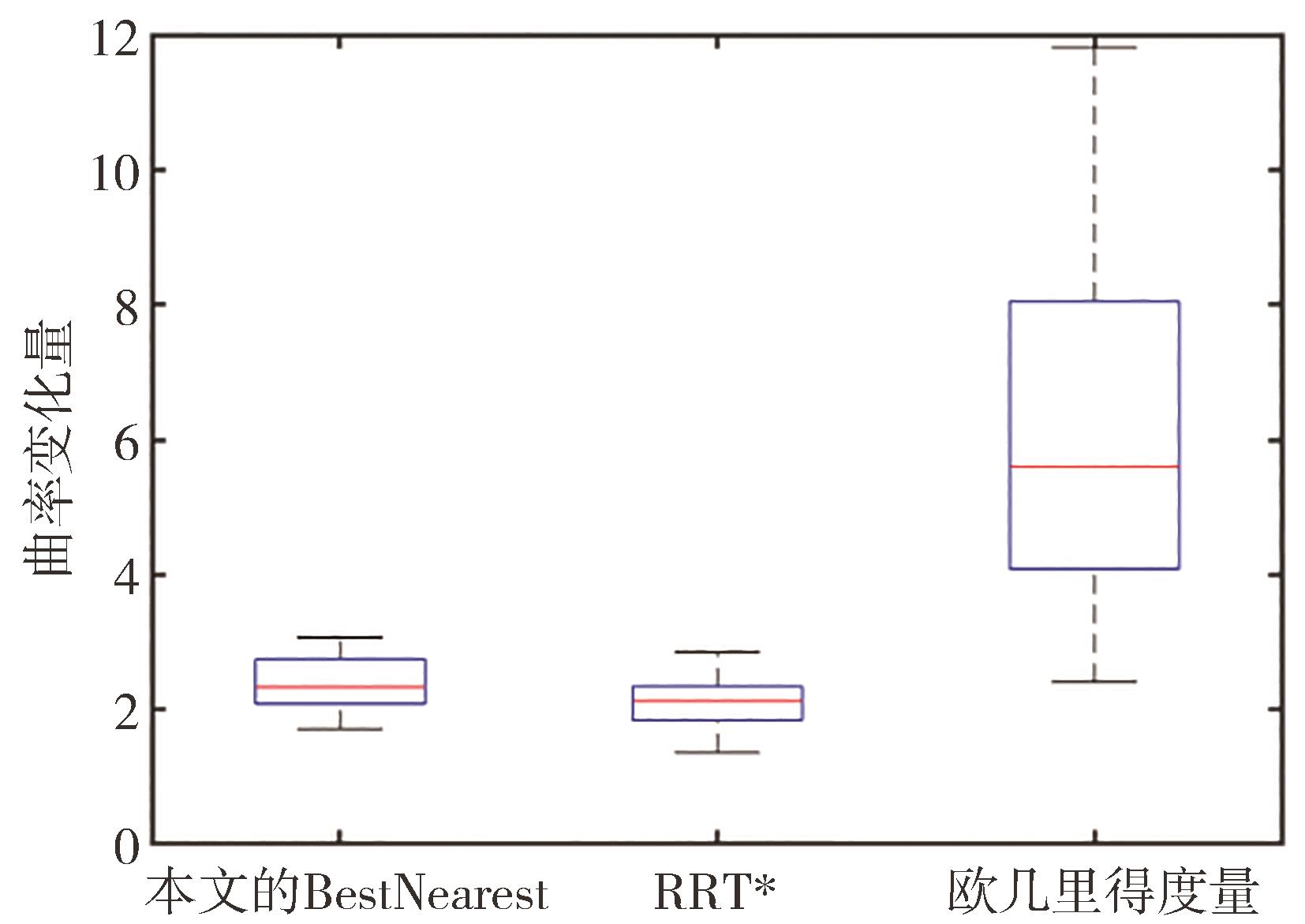
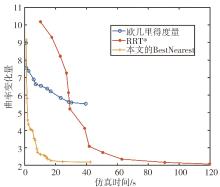
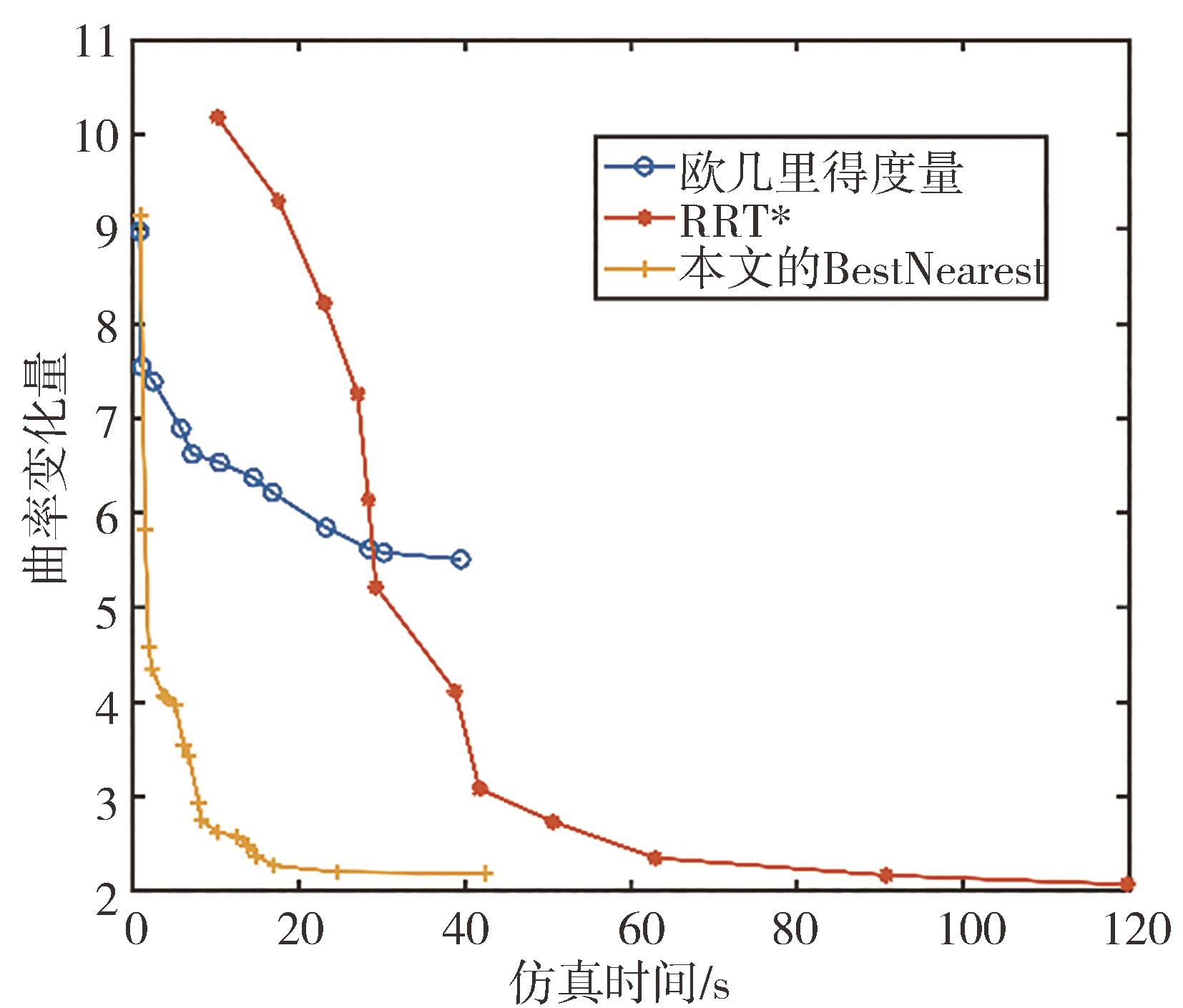
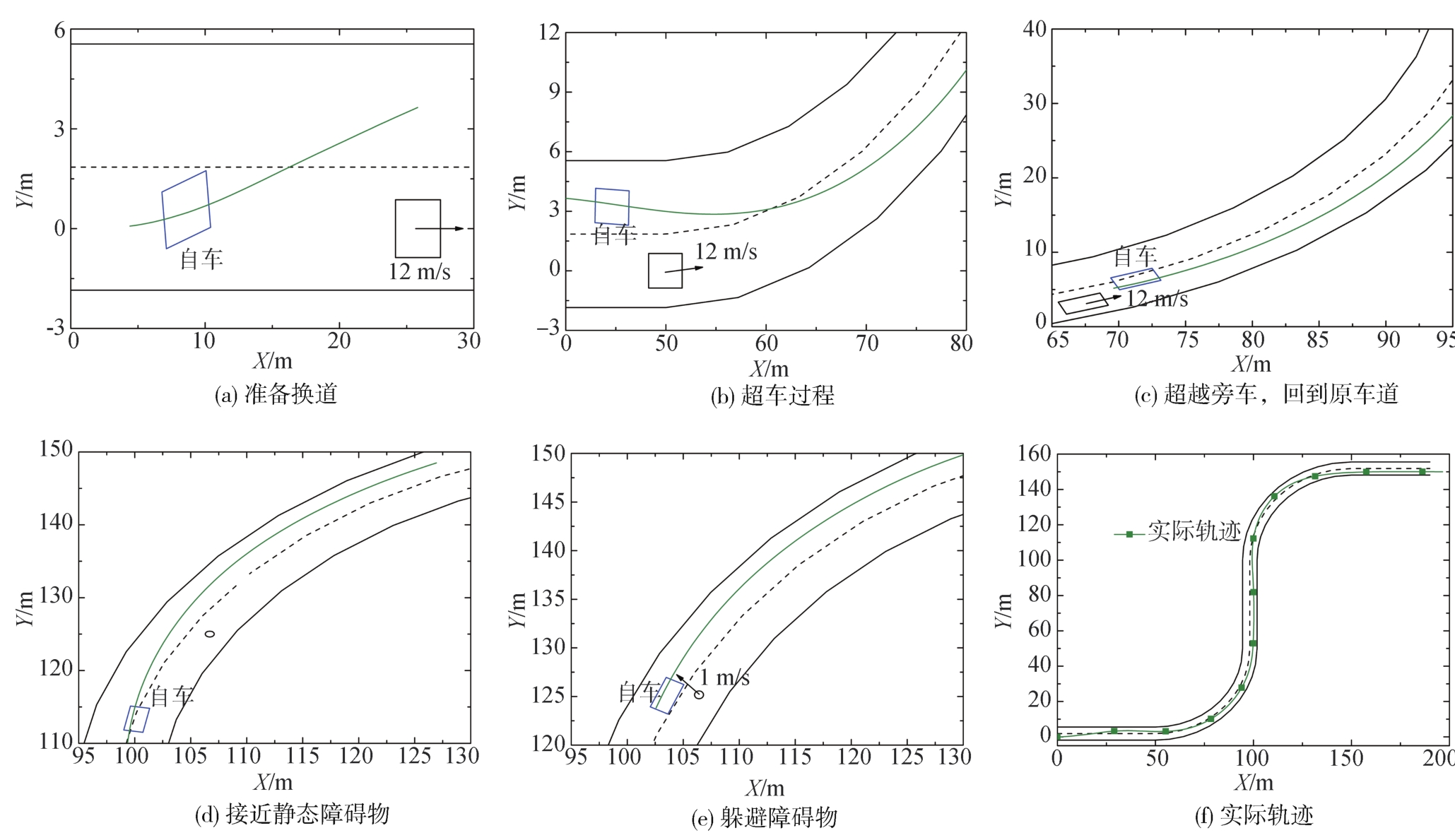
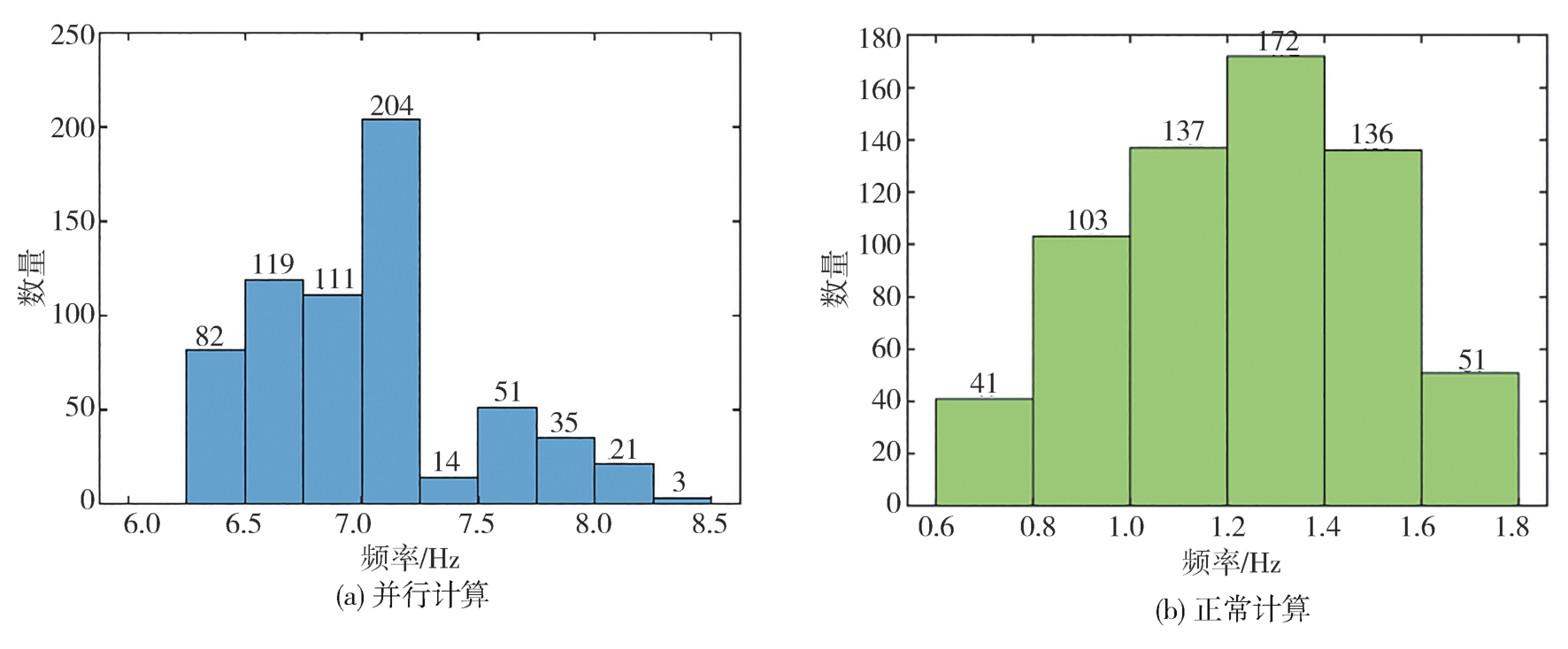
针对智能汽车弯道避障问题,提出了一种兼顾规划曲线平滑度和车辆稳定性的轨迹规划方法。将轨迹规划分为解耦的路径规划和速度规划处理,利用改进的快速随机搜索树(RRT)构建曲率连续且曲率变化量最小的无碰撞的螺旋线路径。改进后的RRT基于深度神经网络的度量函数,选取并连接代价函数最小的树节点,并通过搜索附近节点寻找是否存在代价函数更小的节点。而在速度规划中首先根据道路限速规则,采用梯形规划输出连续的目标加速度曲线。然后基于螺旋线路径曲率和自车状态,采用预瞄加速度矢量控制(PGVC)动态调整目标加速度,最后通过加速度控制逻辑获得最终的期望加速度。仿真结果表明,所提出的轨迹规划方法不仅能使智能汽车满足弯道避撞和路径跟踪的目标要求,且提高了车辆高速过弯的稳定性能,同时本文还验证RRT的快速收敛性质、路径平滑性和基于并行计算的实时性。