汽车工程 ›› 2022, Vol. 44 ›› Issue (5): 756-763.doi: 10.19562/j.chinasae.qcgc.2022.05.013
所属专题: 底盘&动力学&整车性能专题2022年
李希宸,张虹( ),解晓天,汪博文,王新宇
),解晓天,汪博文,王新宇
收稿日期:2021-11-04
修回日期:2022-01-10
出版日期:2022-05-25
发布日期:2022-05-27
通讯作者:
张虹
E-mail:zhanghong@bit.edu.cn
基金资助:
Xichen Li,Hong Zhang(),Xiaotian Xie,Bowen Wang,Xinyu Wang
Received:2021-11-04
Revised:2022-01-10
Online:2022-05-25
Published:2022-05-27
Contact:
Hong Zhang
E-mail:zhanghong@bit.edu.cn
摘要:
因不平路面动载荷而产生明显波动的轮速会导致车轮滑移率的跳变,进而会频繁触发以滑移率为控制目标的驱动防滑控制系统(ASR),因此,须对不平路面进行识别并优化控制。针对沟坎路面,本文提出以滑移率和整车侧倾角变化为观测量,采用门限逻辑法实现路面识别。对于连续不平路面,结合穿越计次法与能量法进行路面不平状况判别,以滑移率与路面附着系数所包围的封闭面积作为特征值进行路面条件判定,根据识别结果,采用ASR阈值调整控制,减小车轮悬空导致的打滑现象及主动制动不均产生的非理想横摆。结果表明,所提算法能够快速准确识别不平路面特性,ASR主动制动时长缩短18.8%,减少了在不平路面行驶的动力损失。
李希宸,张虹,解晓天,汪博文,王新宇. 针对ASR系统防误触的复杂路面识别算法[J]. 汽车工程, 2022, 44(5): 756-763.
Xichen Li,Hong Zhang,Xiaotian Xie,Bowen Wang,Xinyu Wang. Complicated Road Surface Identification Algorithm with Prevention of ASR False Activation[J]. Automotive Engineering, 2022, 44(5): 756-763.
表1
路面不平度分级标准"
| 路面等级 | 路面等级 | ||
|---|---|---|---|
| A | E | ||
| B | F | ||
| C | G | ||
| D | H |
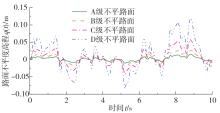
图1
40 km/h下的不平路面激励"
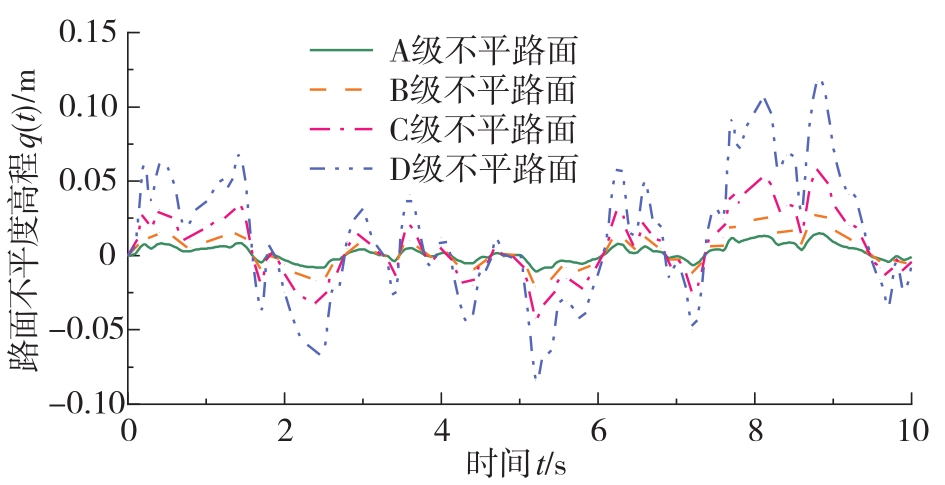
图2
滤波效果对比图"
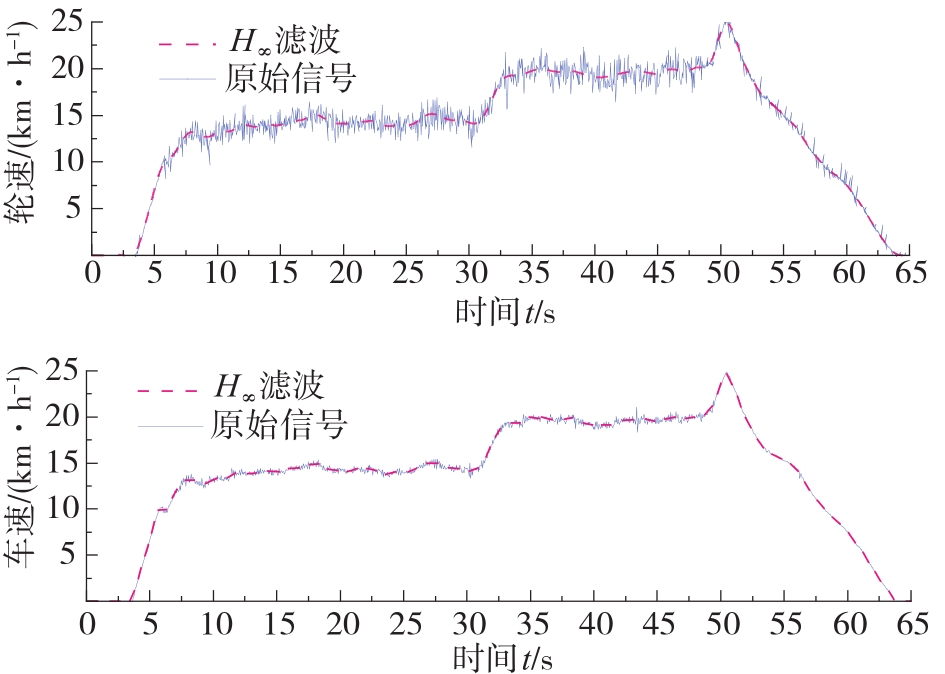

图3
减速带工况下的滑移率变化图"
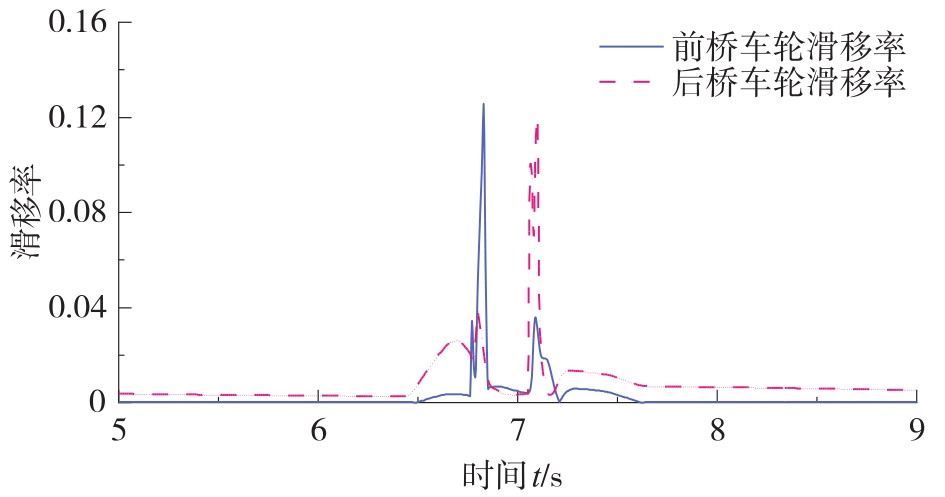
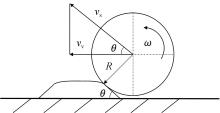
图4
减速带工况下的车轮运动示意图"
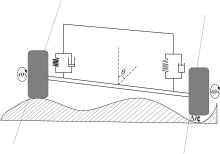
图5
连续不平路面下的车轮运动示意图"
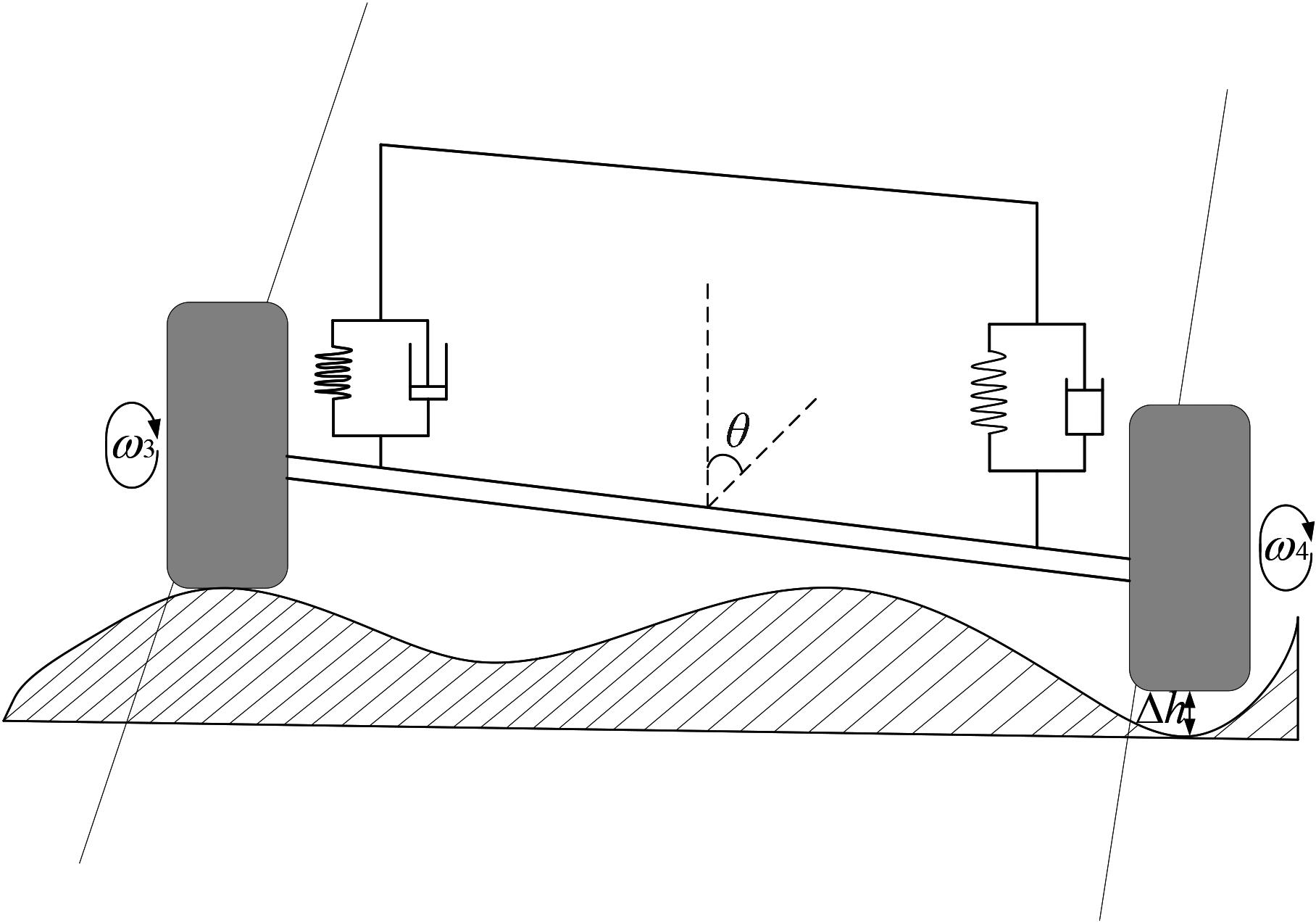
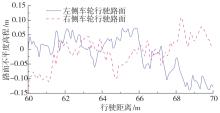
图6
不平路面激励"
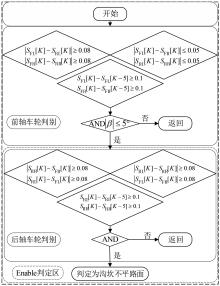
图7
沟坎路面识别逻辑框图"

图8
穿越计次法统计规律"
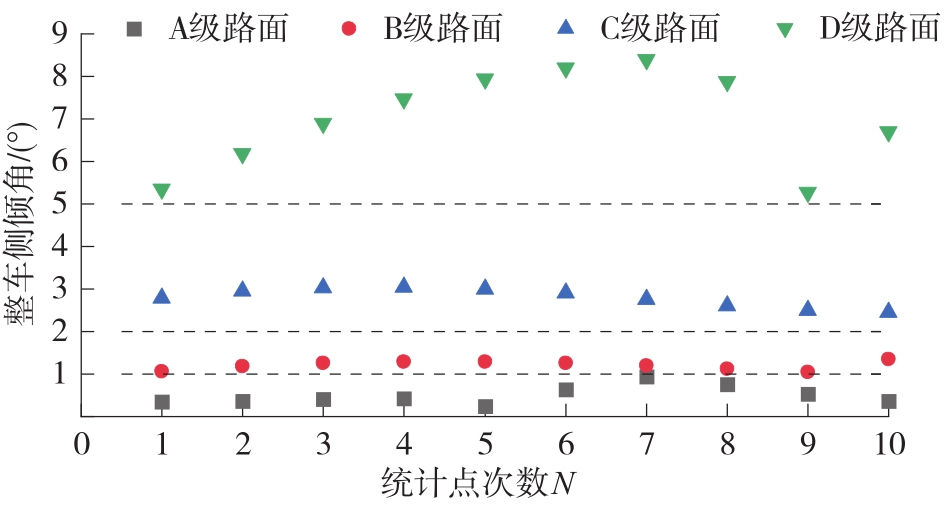
表2
整车侧倾角变化"
侧倾角度/ (°) | 路面等级 | |||
|---|---|---|---|---|
| A级 | B级 | C级 | D级 | |
| 均值 | 0.372 | 0.740 | 1.276 | 2.834 |
| 最大值 | 0.710 | 1.391 | 3.045 | 8.494 |
| 最小值 | 0.008 | 0.022 | 0.014 | 0.017 |
| 标准差 | 0.191 | 0.412 | 0.889 | 2.312 |
表3
路面条件参数表"
| 路面类型 | 最优滑移率 | 峰值附着 | 路面特征值 | 路面等级序号 | |||
|---|---|---|---|---|---|---|---|
| 冰 | 0.05 | 306.39 | 0.001 | 0.031 | 0.05 | [0-0.14] | 1 |
| 雪 | 0.195 | 94.13 | 0.064 6 | 0.060 | 0.19 | [0.14-0.96] | 2 |
| 湿鹅卵石 | 0.400 | 33.71 | 0.12 | 0.140 | 0.38 | [0.96-4.33] | 3 |
| 湿沥青 | 0.857 | 33.82 | 0.35 | 0.131 | 0.80 | [15.82-29.91] | 7 |
| 干水泥 | 1.197 | 25.17 | 0.54 | 0.160 | 1.08 | [8.46-13.84] | 5 |
| 干沥青 | 1.280 | 23.99 | 0.52 | 0.170 | 1.17 | [4.33-8.46] | 4 |
| 干鹅卵石 | 1.371 | 6.46 | 0.67 | 0.400 | 1.00 | [8.46-15.82] | 6 |
图9
不同路面条件下的μ-s曲线"
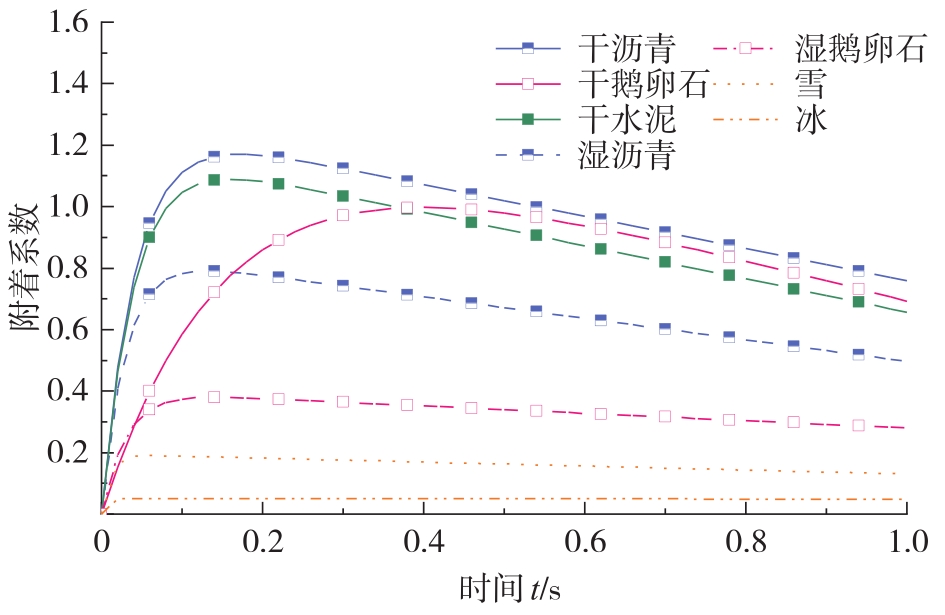
图10
路面状态特征值τ"
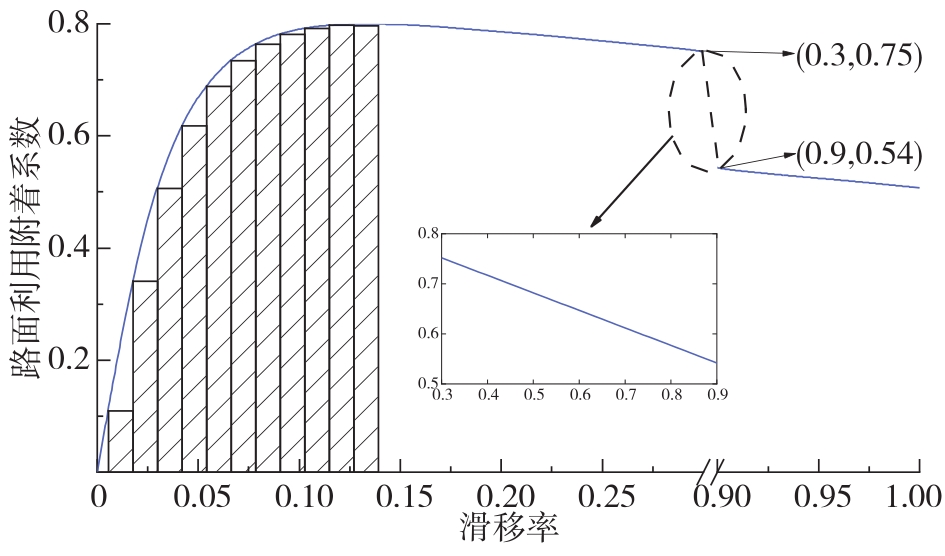
图11
ASR阈值调整对比图"
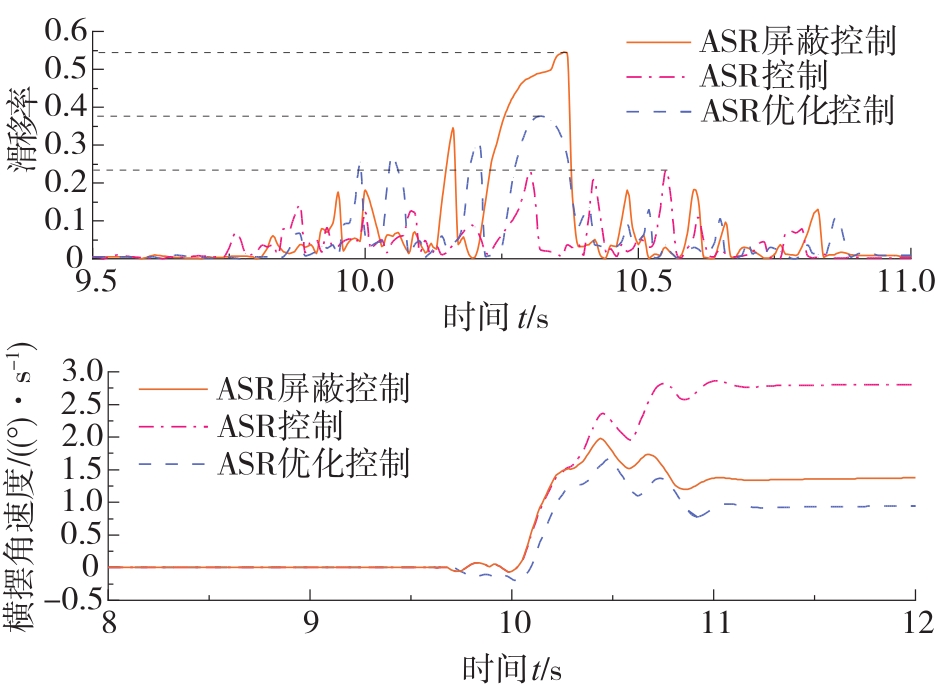

图12
控制算法流程框图"
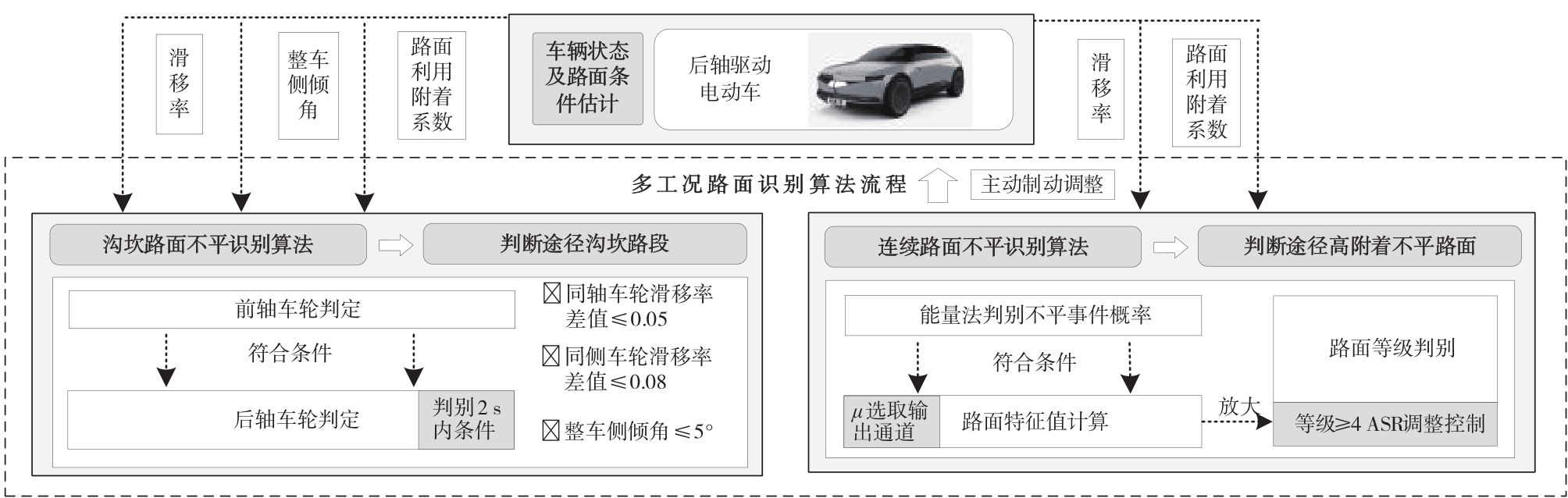

图13
沟坎路面识别效果图"
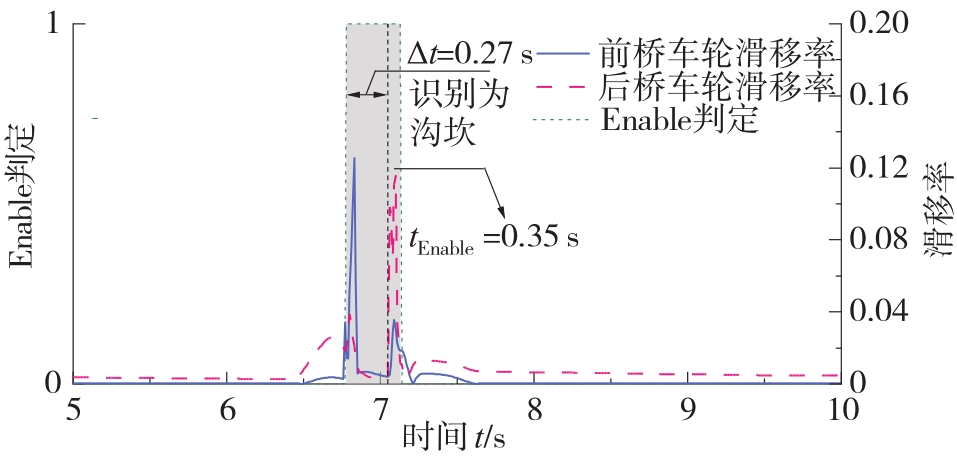
图14
不平路面判定效果图"
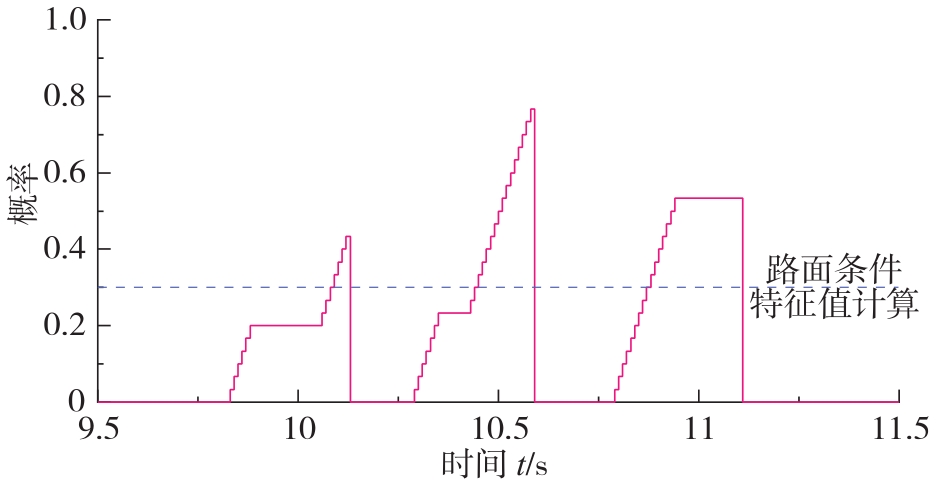
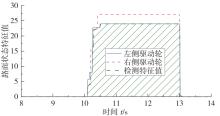
图15
连续不平路面特征值检测结果图"
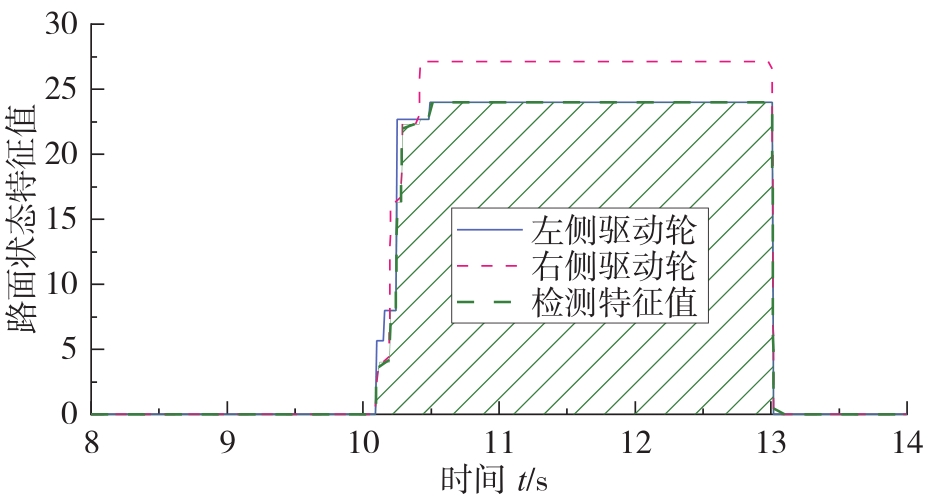
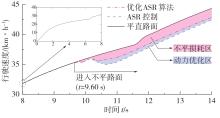
图16
车速对比效果"
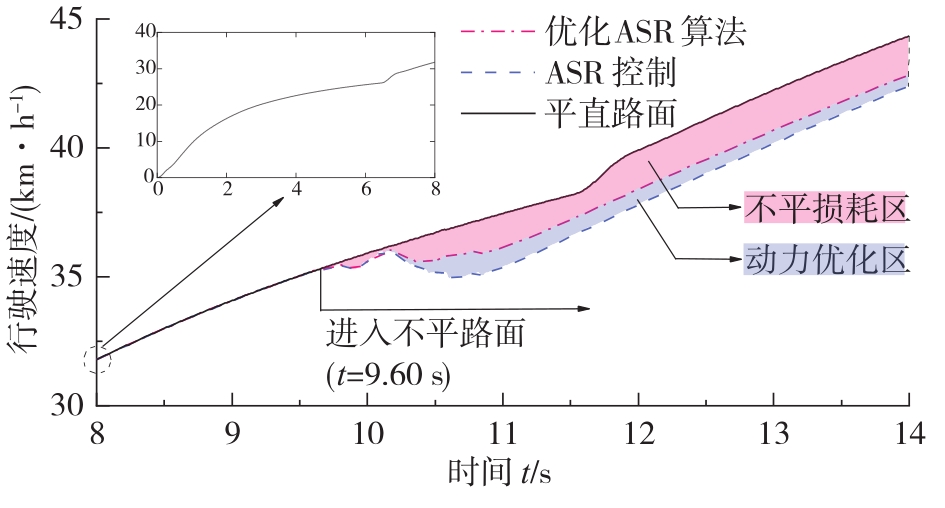

图17
制动压力对比图"

| 1 | 苑绍志, 李静, 李幼德. 考虑路面不平的牵引力控制系统[J]. 吉林大学学报(工学版), 2007(5):990-993. |
| YUAN S Z, Li J, LI Y D. Traction control system with consideration of road surface roughness[J]. Journal of Jilin University(Engineering and Technology Edition), 2007(5):990-993. | |
| 2 | 孔磊, 宋健, 严忆泉, 等. 用于防抱制动系统的路面不平特征识别算法[J]. 机械工程学报, 2007(11):229-234. |
| KONG L, SONG J, YAN Y Q, et al. Algorithm of feature recognition of road roughness for anti-lock brake system[J]. Journal of Mechanical Engineering, 2007(11):229-234. | |
| 3 | LEI Y, WEI Q, LI X, et al. Control strategy for automatic transmission under the condition of rough road feature recognition[J]. MATEC Web of Conferences, 2017,95:9001. |
| 4 | 孙少华, 卢晓辉, 雷雨龙, 等. 基于发动机转速变化率的不平路面识别方法[C]. 2015现代汽车设计与制造技术论坛, 盐城, 2015. |
| SUN S H, LU X H, LEI Y L, et al. A recognition method of uneven road surface based on engine speed change rate[C]. 2015 Modern Automotive Design and Manufacturing Technology Forum, Yancheng, 2015. | |
| 5 | HAN J, KIM D, LEE M, et al. Enhanced road boundary and obstacle detection using a downward-looking LIDAR sensor[J]. IEEE Transactions on Vehicular Technology, 2012,61(3):971-985. |
| 6 | PANG C, ZHONG X, HU H, et al. Adaptive obstacle detection for mobile robots in urban environments using downward-looking 2D LiDAR[J]. Sensors, 2018,18(6):1749. |
| 7 | JAAKKOLA A, HYYPPA J, HYYPPA H, et al. Retrieval algorithms for road surface modelling using laser-based mobile mapping[J]. Sensors (Basel), 2008,8(9):5238-5249. |
| 8 | ISO 8608: Mechanical vibration-road surface profiles-reporting of measured data[S]. 2016. |
| 9 | LIN C, GONG X, XIONG R, et al. A novel H ∞ and EKF joint estimation method for determining the center of gravity position of electric vehicles[J]. Applied Energy, 2017,194:609-616. |
| 10 | GONG X, SUH J, LIN C. A novel method for identifying inertial parameters of electric vehicles based on the dual H infinity filter[J]. Vehicle system dynamics, 2020,58(1):28-48. |
| 11 | 林程, 周逢军, 徐志峰, 等. 基于补偿自适应控制算法的车辆状态参数估计[J]. 农业机械学报, 2014,45(11):1-8. |
| LIN C, ZHOU F J, XU Z F, et al. Estimation of vehicle status parameters based on compensation adaptive control algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(11):1-8. | |
| 12 | YAN L, LI Z, LIU H, et al. Detection and classification of pole-like road objects from mobile LiDAR data in motorway environment[J]. Optics and laser technology, 2017,97:272-283. |
| 13 | YANG F, RAO Y. Vision-based intelligent vehicle road recognition and obstacle detection method[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2020,34(7):2050020. |
| 14 | WANG B, LIN C, LIANG S, et al. Hierarchical model predictive control for autonomous collision avoidance of distributed electric drive vehicle with lateral stability analysis in extreme scenarios[J]. World Electric Vehicle Journal, 2021,12(4):192. |
| 15 | PARK J H, KIM C Y. Wheel slip control in traction control system for vehicle stability[J]. Vehicle System Dynamics, 1999,31(4):263-278. |
| 16 | FUJIMOTO H, FUJII K, TAKAHASHI N. Traction and yaw-rate control of electric vehicle with slip-ratio and cornering stiffness estimation, 2007[C]. IEEE, 2007. |
| 17 | BURCKHARDT M. Fahrwerktechnik, radschlupf-regelsysteme[M]. Vogel, 1993. |
| 18 | DE CASTRO R, ARAUJO R E, FREITAS D. Real-time estimation of tyre-road friction peak with optimal linear parameterisation[J]. IET Control Theory & Applications, 2012,6(14):2257-2268. |
| 19 | 王博, 孙仁云, 徐延海, 等. 考虑路面不平度的路面识别方法[J]. 机械工程学报, 2012,48(24):127-133. |
| WANG B, SUN R Y, XU Y H, et al. Road surface condition identification approach with consideration[J]. Journal of Mechanical Engineering, 2012,48(24):127-133. | |
| 20 | 王博, 孙仁云. 基于状态特征因子的路面识别方法研究[J]. 汽车工程, 2012,34(6):506-510, 522. |
| WANG B, SUN R Y. A research on road condition identification based on characterization factors[J]. Automotive Engineering, 2012,34(6):506-510, 522. |
| [1] | 马天飞,李波,朱冰,赵健. 考虑大气条件影响的自动泊车系统超声波雷达建模[J]. 汽车工程, 2023, 45(9): 1646-1654. |
| [2] | 陈路明,廖自力,张征. 多轮分布式电驱动车辆双重转向分层控制系统设计[J]. 汽车工程, 2021, 43(9): 1383-1393. |
| [3] | 刘哲,高云凯,徐翔,陈佳举,马超. 关门时车内声场的仿真与试验研究[J]. 汽车工程, 2021, 43(6): 909-916. |
| [4] | 朱冰,靳万里,李论,赵健,陈志成,张伊晗,李伟男. 基于主客观综合赋权法的制动踏板感觉评价[J]. 汽车工程, 2021, 43(5): 697-704. |
| [5] | 石求军, 李静. 基于非线性扰动估计的客车防侧翻控制*[J]. 汽车工程, 2020, 42(9): 1224-1231. |
| [6] | 柯俊, 吴震宇, 史文库, 胡旭东. 复合材料板簧制造工艺的研究进展*[J]. 汽车工程, 2020, 42(8): 1131-1138. |
| [7] | 石求军, 李静, 刘鹏. 基于非线性扰动观测的商用车ESC自适应滑模控制研究*[J]. 汽车工程, 2020, 42(6): 801-807. |
| [8] | 柯俊, 祖洪飞, 史文库. 基于有限元法及遗传算法的推力杆球铰多目标优化方法*[J]. 汽车工程, 2020, 42(2): 178-183. |
| [9] | 柯俊, 史文库, 袁可, 周刚. 复合材料板簧连接结构的匹配设计方法*[J]. 汽车工程, 2019, 41(9): 1096-1101. |
| [10] | 朱冰, 李伟男, 汪震, 赵健, 何睿, 韩嘉懿. 基于随机森林的驾驶人驾驶习性辨识策略*[J]. 汽车工程, 2019, 41(2): 213-218. |
| [11] | 柯俊, 史文库, 袁可. 基于整车性能的复合材料板簧阻尼特性研究*[J]. 汽车工程, 2019, 41(12): 1424-1429. |
| [12] | 袁侠义, 陈林, 黎帅, 王文源. 汽车侧风稳定性的仿真与评价*[J]. 汽车工程, 2019, 41(11): 1286-1293. |
| [13] | 范璐,李晨阳,吴佳巍,赵尤蕾,何海,吴伟. 汽车托运平板车辆的模拟试验方法研究[J]. 汽车工程, 2018, 40(5): 605-609. |
|