汽车工程 ›› 2022, Vol. 44 ›› Issue (8): 1173-1182.doi: 10.19562/j.chinasae.qcgc.2022.08.007
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
黄润辉,胡立坤( ),苏鸣方,徐大也,陈奥然
),苏鸣方,徐大也,陈奥然
收稿日期:2022-03-07
修回日期:2022-04-06
出版日期:2022-08-25
发布日期:2022-08-25
通讯作者:
胡立坤
E-mail:hlk3email@163.com
基金资助:
Runhui Huang,Likun Hu(),Mingfang Su,Daye Xu,Aoran Chen
Received:2022-03-07
Revised:2022-04-06
Online:2022-08-25
Published:2022-08-25
Contact:
Likun Hu
E-mail:hlk3email@163.com
摘要:
激光点云语义分割是自动驾驶系统中道路场景感知的重要分支。虽然主流方法将点云转换为规则的二维图像或笛卡尔栅格进行处理,减少因点云非结构化所带来的计算量,但二维图像方法不可避免地改变点云的三维几何拓扑结构,而笛卡尔栅格忽略了室外激光点云的密度不一致性,从而限制了包括行人和自行车等小物体的语义分割能力。因此,本文中提出了一种基于三维锥形栅格和稀疏卷积的激光点云语义分割方法,利用锥形栅格分区解决了点云的稀疏性和密度不一致的问题;为提高模型推理速度,设计了重参数化三维稀疏卷积网络。在SemanticKITTI和nuScenes两个大规模数据集上对所提方法进行评估。结果表明,与目前最新的点云分割方法相比,所提方法的平均交并比分别提升了1.3%和0.8%,尤其对小物体识别有显著的提升。
黄润辉,胡立坤,苏鸣方,徐大也,陈奥然. 基于三维锥形栅格的激光点云语义分割方法[J]. 汽车工程, 2022, 44(8): 1173-1182.
Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid[J]. Automotive Engineering, 2022, 44(8): 1173-1182.

图1
激光雷达生成的点云"
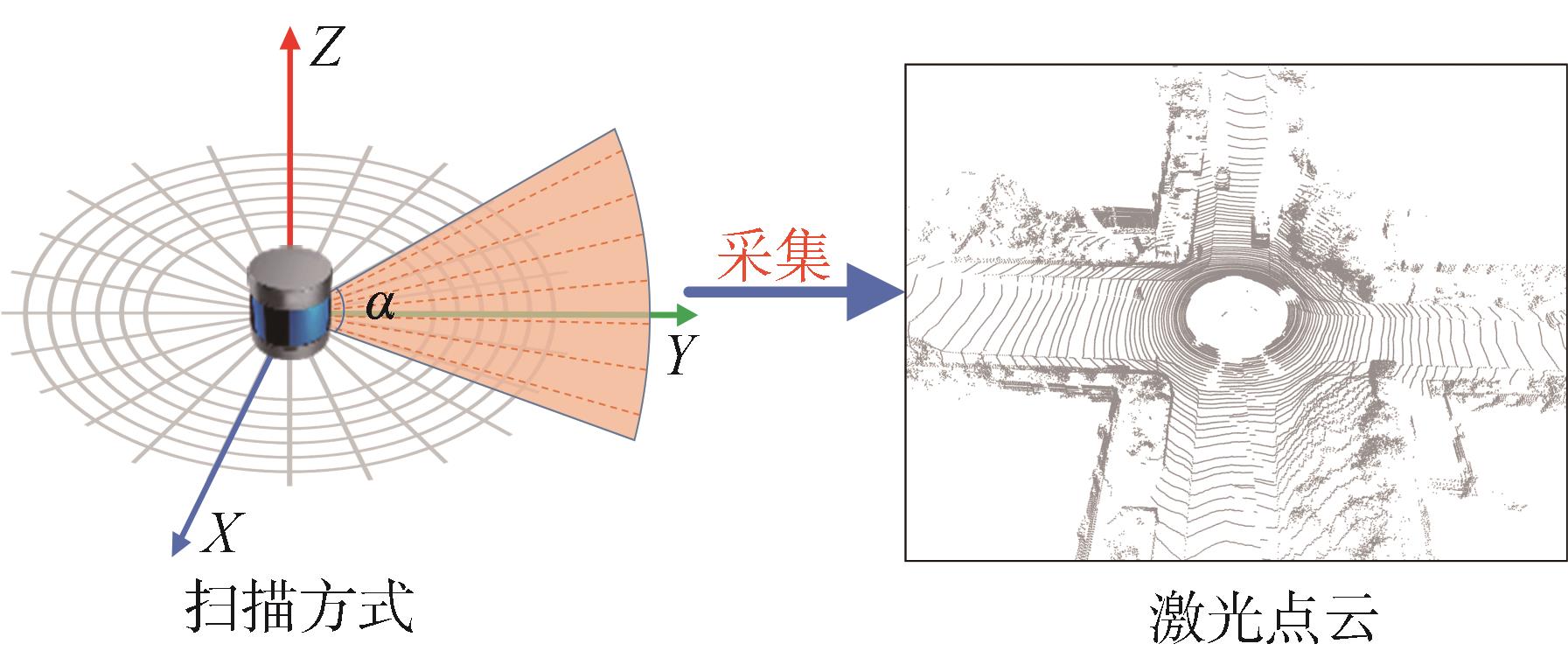
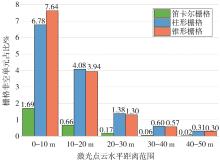
图2
激光点云水平距离范围内非空栅格的占比"
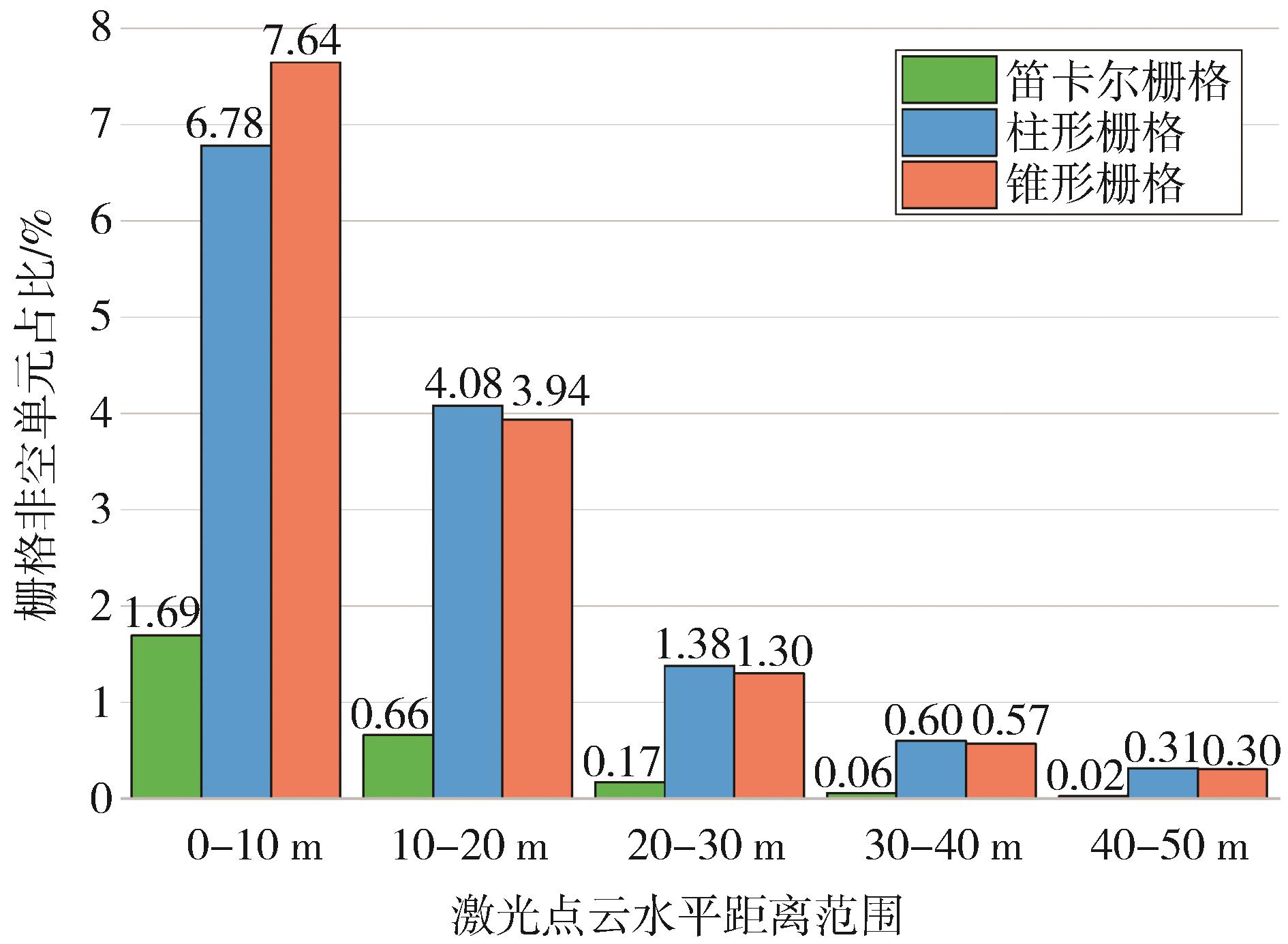

图3
整体网络模型"

图4
锥形栅格分区网络"


图5
RepSpconv3D网络的重参数转化流程"
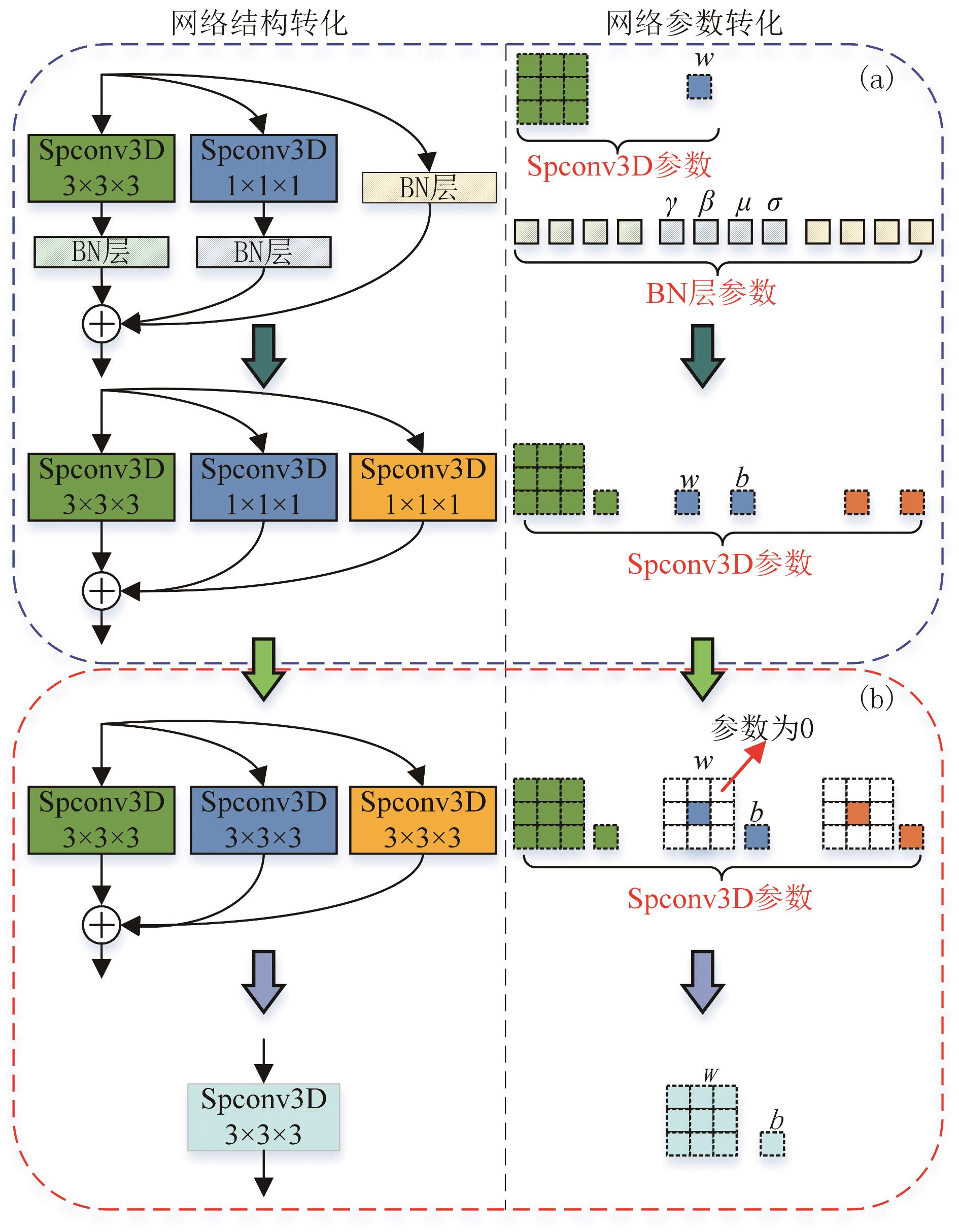
表1
SemanticKITTI测试集的预测结果"
| 算法 | mIoU/ % | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Darknet53[ | 49.9 | 86.4 | 24.5 | 32.7 | 25.5 | 22.6 | 36.2 | 33.6 | 4.7 | 91.8 | 64.8 | 74.6 | 27.9 | 84.1 | 55.0 | 78.3 | 50.1 | 64.0 | 38.9 | 52.2 |
| RandLA-Net[ | 50.3 | 94.0 | 19.8 | 21.4 | 42.7 | 38.7 | 47.5 | 48.8 | 4.6 | 90.4 | 56.9 | 67.9 | 15.5 | 81.1 | 49.7 | 78.3 | 60.3 | 59.0 | 44.2 | 38.1 |
| RangeNet++[ | 52.2 | 91.4 | 25.7 | 34.4 | 25.7 | 23.0 | 38.3 | 38.8 | 4.8 | 91.8 | 65.0 | 75.2 | 27.8 | 87.4 | 58.6 | 80.5 | 55.1 | 64.6 | 47.9 | 55.9 |
| PolarNet[ | 54.3 | 93.8 | 40.3 | 30.1 | 22.9 | 28.5 | 43.2 | 40.2 | 5.6 | 90.8 | 61.7 | 74.4 | 21.7 | 90.0 | 61.3 | 84.0 | 65.5 | 67.8 | 51.8 | 57.5 |
| MinkNet42[ | 54.3 | 94.3 | 23.1 | 26.2 | 26.1 | 26.7 | 43.1 | 36.4 | 7.9 | 91.1 | 63.8 | 69.7 | 29.3 | 92.7 | 57.1 | 83.7 | 68.4 | 64.7 | 57.3 | 60.1 |
| KPConv[ | 58.8 | 92.5 | 38.7 | 36.5 | 29.6 | 33.0 | 45.6 | 46.2 | 20.1 | 91.7 | 63.4 | 74.8 | 26.4 | 89.0 | 59.4 | 82.0 | 58.7 | 65.4 | 49.6 | 58.9 |
| Salsanex[ | 59.5 | 91.9 | 48.3 | 38.6 | 38.9 | 31.9 | 60.2 | 59.0 | 19.4 | 91.7 | 63.7 | 75.8 | 29.1 | 90.2 | 64.2 | 81.8 | 63.6 | 66.5 | 54.3 | 62.1 |
| FusionNet[ | 61.3 | 95.3 | 47.5 | 37.7 | 41.8 | 34.5 | 59.5 | 56.8 | 11.9 | 91.8 | 68.8 | 77.1 | 30.8 | 92.5 | 69.4 | 84.5 | 69.8 | 68.5 | 60.4 | 66.5 |
| Cylinder3D[ | 67.8 | 97.1 | 67.6 | 64.0 | 59.0 | 58.6 | 73.9 | 67.9 | 36.0 | 91.4 | 65.1 | 75.5 | 32.3 | 91.0 | 66.5 | 85.4 | 71.8 | 68.5 | 62.6 | 65.6 |
| (AF)2-S3Net[ | 69.7 | 94.5 | 65.4 | 86.8 | 39.2 | 41.1 | 80.7 | 80.4 | 74.3 | 91.3 | 68.8 | 72.5 | 53.5 | 87.9 | 63.2 | 70.2 | 68.5 | 53.7 | 61.5 | 71.0 |
| 本文算法 | 71.0 | 97.3 | 73.5 | 72.1 | 49.3 | 58.5 | 79.8 | 82.8 | 23.6 | 92.9 | 73.0 | 79.7 | 27.1 | 91.8 | 68.5 | 86.9 | 75.8 | 72.0 | 70.0 | 75.1 |
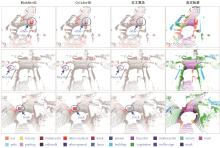
图6
SemanticKITTI验证集的可视化分析"
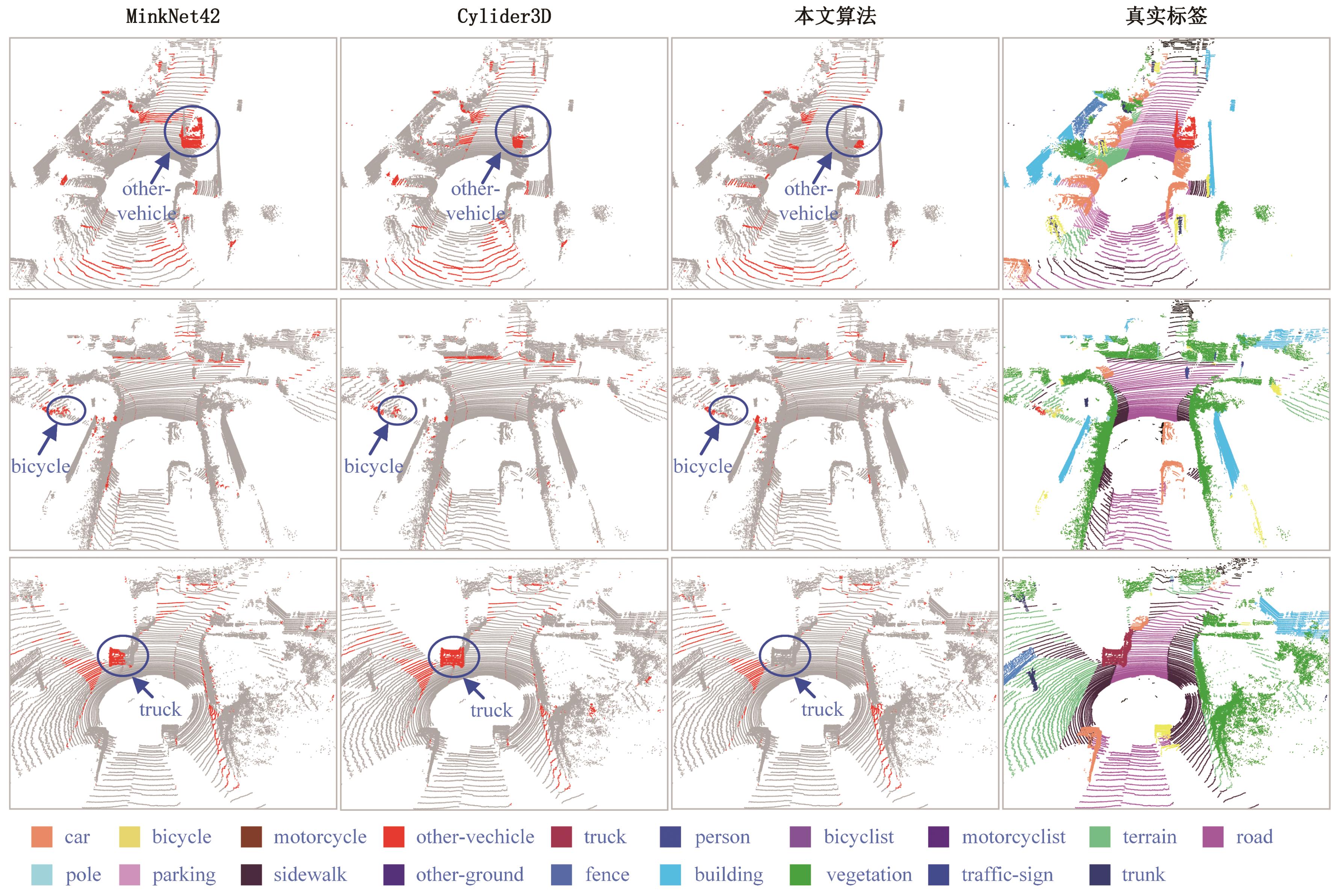
表2
SemanticKITTI验证集的性能评估结果"
| 算法 | 模型参数/106 | 内存消耗/Gb | 推理时间/ms | mIoU/ % |
|---|---|---|---|---|
| PolarNet | 13.0 | 7.7 | 160 | 58.2 |
| MinkNet42 | 21.7 | 4.2 | 114 | 61.1 |
| Cylinder3D | 53.3 | 3.4 | 295 | 66.9 |
| 本文算法(未转换) | 103.7 | 4.7 | 170 | 70.5 |
| 本文算法(转换) | 100.7 | 4.5 | 159 | 70.5 |
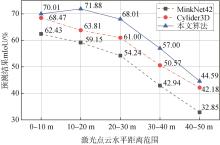
图7
激光点云在不同水平距离的预测结果"

表3
nuScenes测试集的预测结果"
| 算法 | mIoU/% | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PolarNet[ | 69.4 | 72.2 | 16.8 | 77.0 | 86.5 | 51.1 | 69.7 | 64.8 | 54.1 | 69.7 | 63.5 | 96.6 | 67.1 | 77.7 | 72.1 | 87.1 | 84.5 |
| JS3C-Net[ | 73.6 | 80.1 | 26.2 | 87.8 | 84.5 | 55.2 | 72.6 | 71.3 | 66.3 | 76.8 | 71.2 | 96.8 | 64.5 | 76.9 | 74.1 | 87.5 | 86.1 |
| Cylinder3D[ | 77.2 | 82.8 | 29.8 | 84.3 | 89.4 | 63.0 | 79.3 | 77.2 | 73.4 | 84.6 | 69.1 | 97.7 | 70.2 | 80.3 | 75.5 | 90.4 | 87.6 |
| AMVNet[ | 77.4 | 80.6 | 32.0 | 81.7 | 88.9 | 67.1 | 84.3 | 76.1 | 73.5 | 84.9 | 67.3 | 97.5 | 67.4 | 79.4 | 75.5 | 91.5 | 88.7 |
| 本文算法 | 78.2 | 82.2 | 34.7 | 84.0 | 87.5 | 71.4 | 83.2 | 78.9 | 74.2 | 85.0 | 68.3 | 97.4 | 68.7 | 79.8 | 75.9 | 91.6 | 88.6 |
表4
不同网络模块消融结果"
基准 模型 | 锥形 分区 | Rep- Spconv3d | Top-k 损失函数 | Geo-aware 损失函数 | mIoU/% |
|---|---|---|---|---|---|
| √ | 60.6 | ||||
| √ | √ | 63.0 | |||
| √ | √ | √ | 65.8 | ||
| √ | √ | √ | √ | 67.9 | |
| √ | √ | √ | √ | √ | 70.5 |
表5
重参数化网络不同分支组合消融结果"
Spconv3D 3×3×3 | Spconv3D 1×1×1 | Identity层 | mIoU/% | 推理时间 (模型未转换)/ms |
|---|---|---|---|---|
| √ | 68.4 | 137 | ||
| √ | √ | 69.1 | 148 | |
| √ | √ | 68.5 | 146 | |
| √ | √ | √ | 70.5 | 149 |
| 1 | BEHLEY J, GARBADE M, MILIOTO A, et al. SemanticKITTI: a dataset for semantic scene understanding of LIDAR sequences[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 9297-9307. |
| 2 | CAESAR H, BANKITI V, LANG A H, et al. nuScenes: a multimodal dataset for autonomous driving[C]. 2020 IEEE/CVF International Conference on Computer Vision. IEEE, 2020: 11621-11631. |
| 3 | HACKEL T, SAVINOV N, LADICKY L, et al. Semantic3d. net: a new large-scale point cloud classification benchmark[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, IV-1/W1: 91–98. |
| 4 | WU B, WAN A, YUE X, et al. SqueezeSeg: convolutional neural nets with recurrent CRF for real-time road-object segmentation from 3D LIDAR point cloud[C]. 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018: 1887-1893. |
| 5 | WU B, ZHOU X, ZHAO S, et al. SqueezeSegV2: improved model structure and unsupervised domain adaptation for road-object segmentation from a LIDAR point cloud[C]. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 4376-4382. |
| 6 | XU C, WU B, WANG Z, et al. SqueezeSegV3: spatially-adaptive convolution for efficient point-cloud segmentation[C]. European Conference on Computer Vision. Springer, Cham, 2020: 1-19. |
| 7 | MILIOTO A, VIZZO I, BEHLEY J, et al. RangeNet++: fast and accurate LIDAR semantic segmentation[C]. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019: 4213-4220. |
| 8 | REDMON J, FARHADI A. YOLOV3: an incremental improvement[J]. arXiv preprint arXiv:, 2018. |
| 9 | ZHANG Y, ZHOU Z, DAVID P, et al. PolarNet: an improved grid representation for online LIDAR point clouds semantic segmentation[C]. 2020 IEEE/CVF International Conference on Computer Vision. IEEE, 2020: 9601-9610. |
| 10 | MATURANA D, SCHERER S. Voxnet: A 3D convolutional neural network for real-time object recognition[C]. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015: 922-928. |
| 11 | GRAHAM B, ENGELCKE M, VAN DER MAATEN L. 3D semantic segmentation with submanifold sparse convolutional networks[C]. 2018 IEEE/CVF International Conference on Computer Vision. IEEE, 2018: 9224-9232. |
| 12 | CHOY C, GWAK J Y, SAVARESE S. 4D spatio-temporal convnets: minkowski convolutional neural networks[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 3075-3084. |
| 13 | ZHU X, ZHOU H, WANG T, et al. Cylindrical and asymmetrical 3D convolution networks for lidar segmentation[C]. 2021 IEEE/CVF International Conference on Computer Vision. IEEE, 2021: 9939-9948.. |
| 14 | CHENG R, RAZANI R, TAGHAVI E, et al. (AF)2-S3Net: attentive feature fusion with adaptive feature selection for sparse semantic segmentation network[C]. 2021 IEEE/CVF International Conference on Computer Vision. IEEE, 2021: 12547-12556. |
| 15 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3d classification and segmentation[C]. 2017 IEEE/CVF International Conference on Computer Vision. IEEE, 2017: 652-660. |
| 16 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[J]. 31st Internation‐al Conference on Neural Information Processing Systems. CurranAssociates Inc:, 2017:5099-5108. |
| 17 | THOMAS H, QI C R, DESCHAUD J E, et al. KPConv: flexible and deformable convolution for point clouds[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 6411-6420. |
| 18 | HU Q, YANG B, XIE L, et al. Randla-net: efficient semantic segmentation of large-scale point clouds[C]. 2020 IEEE/CVF International Conference on Computer Vision. IEEE, 2020: 11108-11117. |
| 19 | LIU Y, FAN B, MENG G, et al. Densepoint: learning densely contextual representation for efficient point cloud processing[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 5239-5248. |
| 20 | HUANG G, LIU Z, VAN DER MAATEN L, et al. Densely connected convolutional networks[C].2017 IEEE/CVF International Conference on Computer Vision. IEEE, 2017: 4700-4708. |
| 21 | DING X, ZHANG X, MA N, et al. Repvgg: making vgg-style convnets great again[C]. 2021 IEEE/CVF International Conference on Computer Vision. IEEE, 2021: 13733-13742. |
| 22 | LI J, LIU Y, YUAN X, et al. Depth based semantic scene completion with position importance aware loss[J]. IEEE Robotics and Automation Letters, 2019, 5(1): 219-226. |
| 23 | FAN Y, LYU S, YING Y, et al. Learning with average top-k loss[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 24 | BERMAN M, TRIKI A R, BLASCHKO M B. The lovász-softmax loss: a tractable surrogate for the optimization of the intersection-over-union measure in neural networks[C]. 2018 IEEE/CVF International Conference on Computer Vision. 2018: 4413-4421. |
| 25 | CORTINHAL T, TZELEPIS G, ERDAL AKSOY E. SalsaNext: fast, uncertainty-aware semantic segmentation of LiDAR point clouds[C]. International Symposium on Visual Computing. Springer, Cham, 2020: 207-222. |
| 26 | ZHANG F,FANG J,WAH B,et al. Deep fusionnet for pointcloud semantic segmentation[C]. Computer Vision-ECCV2020:16th European Conference,Glasgow,UK,August 23–28,2020,Proceedings,Part XXIV 16. Springer International Publishing,2020:644-663. |
| 27 | YAN X, GAO J, LI J, et al. Sparse single sweep LIDAR point cloud segmentation via learning contextual shape priors from scene completion[J]. arXiv preprint arXiv:, 2020. |
| 28 | LIONG V E, NGUYEN T N T, WIDJAJA S, et al. AMVNet: assertion-based multi-view fusion network for LIDAR semantic segmentation[J]. arXiv preprint arXiv:, 2020. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [4] | 金祖亮,隗寒冰,Liu Zheng,娄路,郑国峰. 基于局部窗口交叉注意力的轻量型语义分割[J]. 汽车工程, 2023, 45(9): 1617-1625. |
| [5] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [6] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [7] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [8] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [9] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 张雷, 关可人, 丁晓林, 郭鹏宇, 王震坡, 孙逢春. 基于图像识别与动力学融合的路面附着系数估计方法[J]. 汽车工程, 2023, 45(7): 1222-1234. |
|