Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (5): 709-718.doi: 10.19562/j.chinasae.qcgc.2023.05.001
Special Issue: 智能网联汽车技术专题-控制2023年
Yu Zhang,Mingfan Xu,Guangyu Bai,Mingming Dong,Li Gao,Yechen Qin( )
)
Received:2022-11-04
Revised:2022-12-03
Online:2023-05-25
Published:2023-05-26
Contact:
Yechen Qin
E-mail:qinyechen@bit.edu.cn
Yu Zhang,Mingfan Xu,Guangyu Bai,Mingming Dong,Li Gao,Yechen Qin. Intelligent Vehicle Switching Control Considering Dynamic Stability Constraints[J].Automotive Engineering, 2023, 45(5): 709-718.
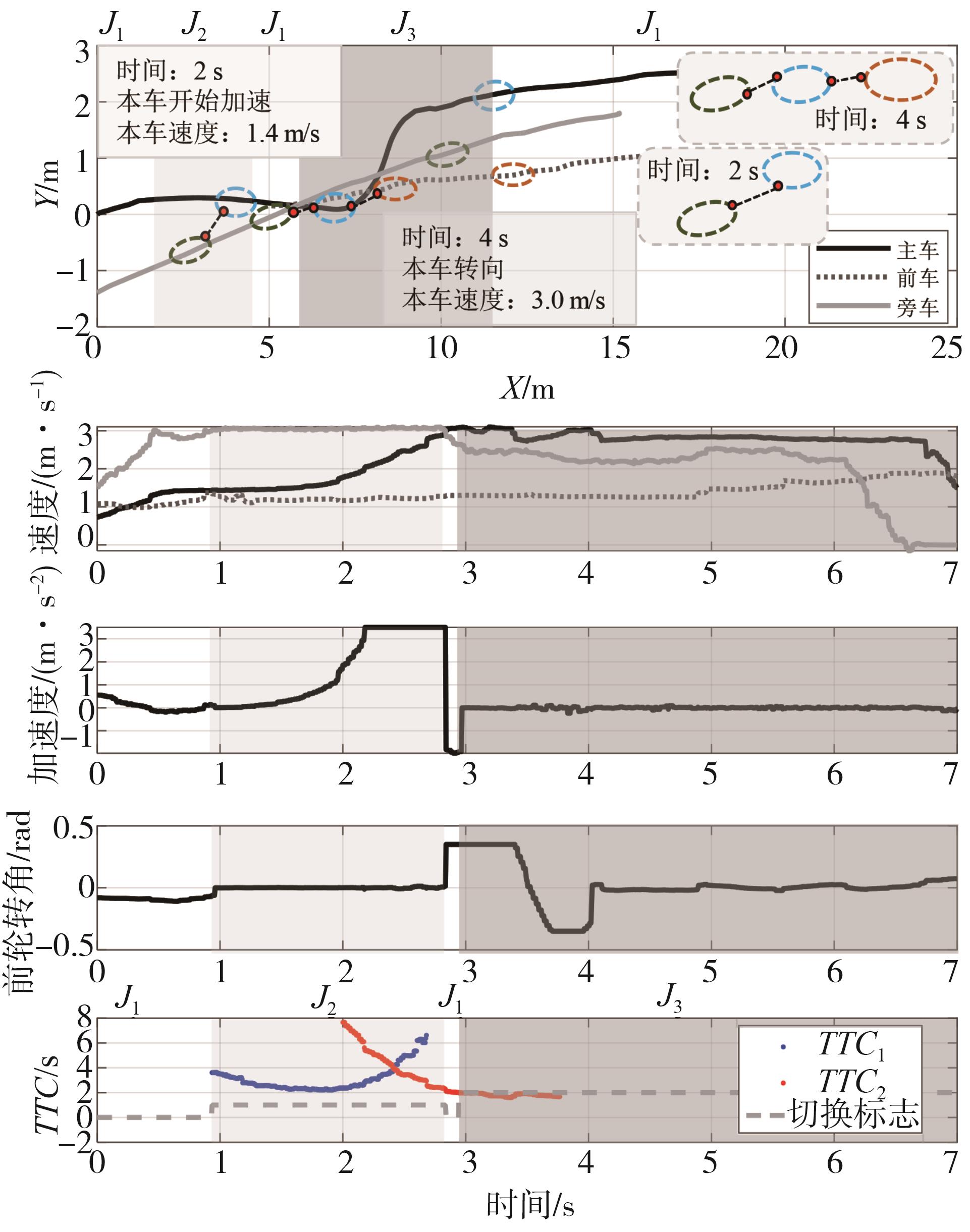
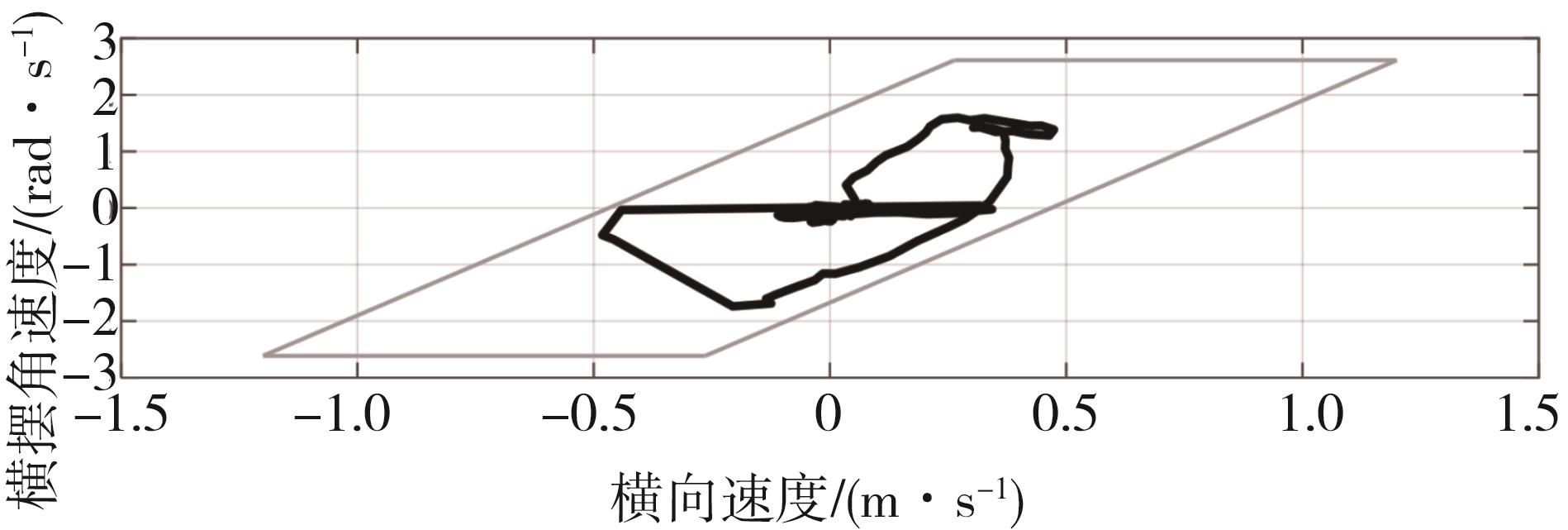
"

"

"
"
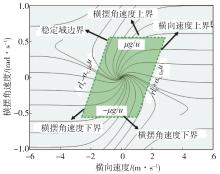
| 横向距离 | 航向 | 触发结果 |
|---|---|---|
| 远( | 平行( | 不触发(0) |
| 远( | 不平行( | 触发(1) |
| 近(< | 平行( | 触发(1) |
| 近(< | 不平行( | 触发(1) |
"

"
"
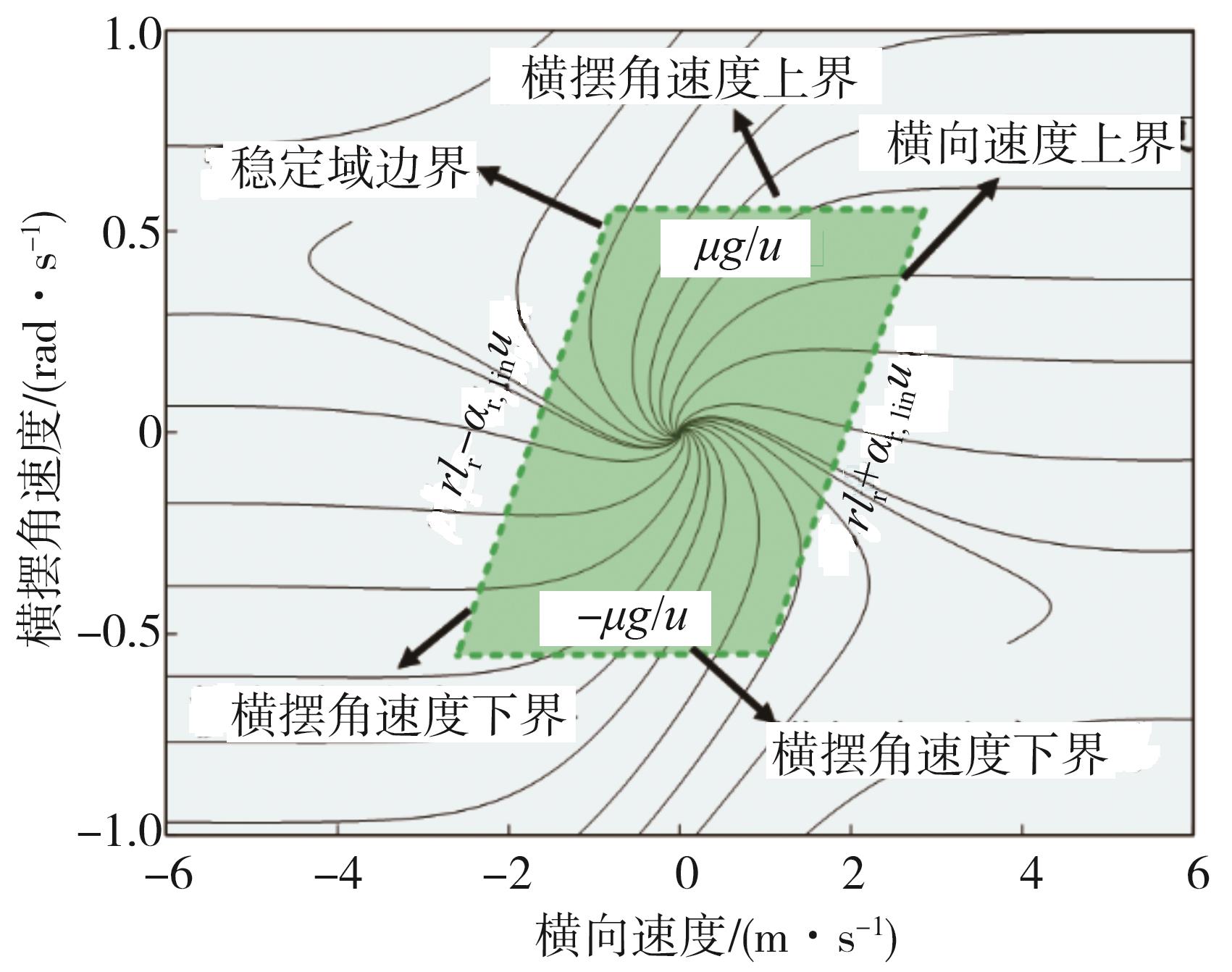
| 参数 | 数值 |
|---|---|
| m/kg | 75 |
| Iz, Iw /(kg·m2) | 700, 0.14 |
| W/m | 0.7 |
| lf, lr/m | 0.27,0.28 |
| Re/m | 0.125 |
| Thres1_1/s | 3.0 |
| Thres1_2, Thres2/s | 2.0,2.0 |
| Np, Nc | 10,3 |

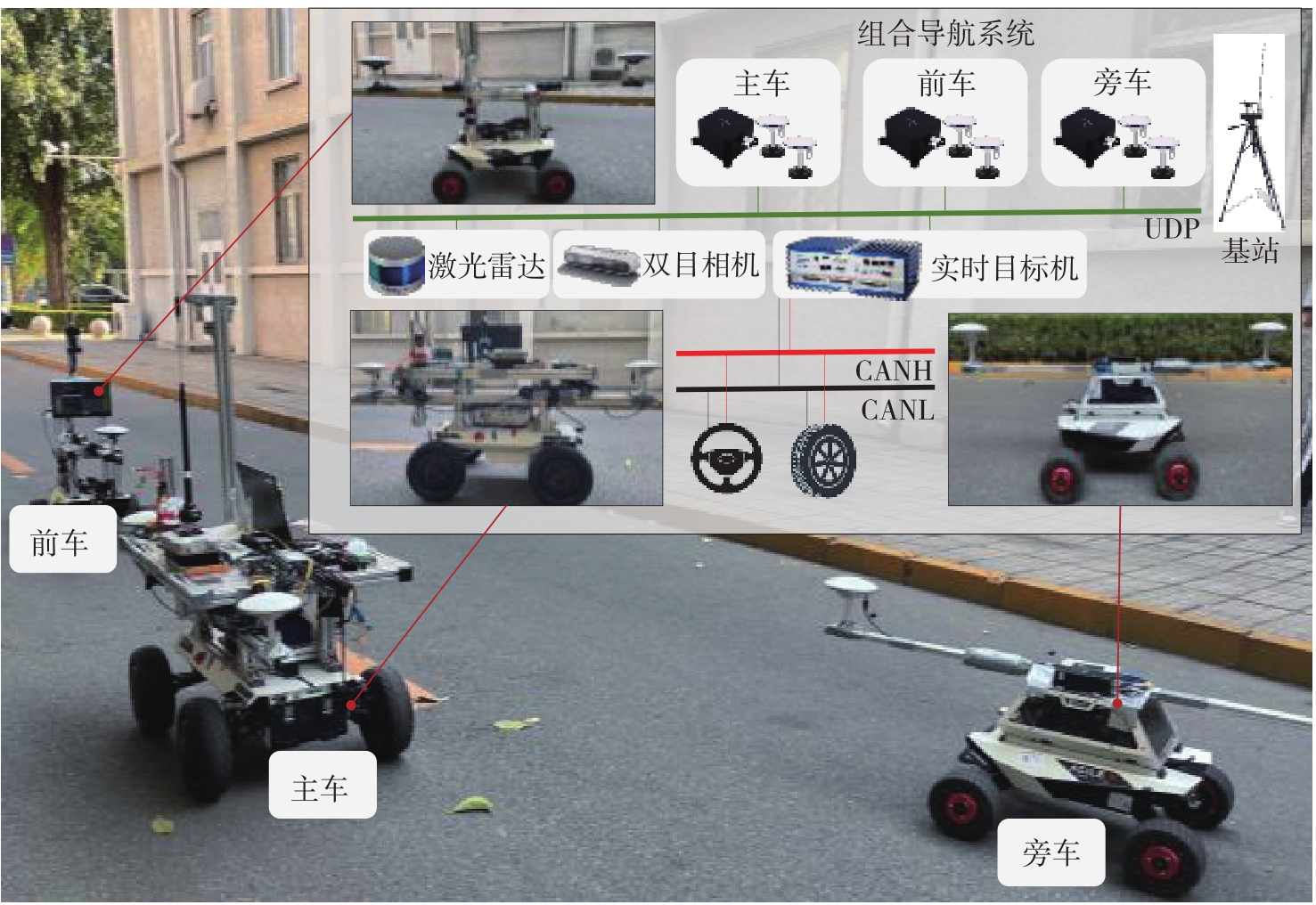
"


"

"


"
"
| 1 | 陈虹, 郭露露, 宫洵, 等. 智能时代的汽车控制[J]. 自动化学报, 2020, 46(7): 1313-1332. |
| CHEN H, GUO L L, GONG X, et al. Automotive control in intelligent era[J]. Acta Automatica Sinica, 2020, 46(7): 1313-1332. | |
| 2 | 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J]. 汽车工程, 2020, 42(2): 206-214. |
| LAN F C, YU M, LI S C, et al. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision[J]. Automotive Engineering, 2020, 42(2): 206-214. | |
| 3 | 李绍松, 郭孔辉, 仇韬, 等. 极限工况下主动前轮转向汽车稳定性控制[J]. 汽车工程, 2020, 42(2): 191-198. |
| LI S S, GUO K H, QIU T, et al. Stability control of vehicle with active front steering under extreme conditions[J]. Automotive Engineering, 2020, 42(2): 191-198. | |
| 4 | GROELKE B, EARNHARDT C, BOREK J, et al. A predictive command governor-based adaptive cruise controller with collision avoidance for non-connected vehicle following[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 12276-12286. |
| 5 | 李亮, 王翔宇, 程硕, 等. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-160. |
| LI L, WANG X Y, CHENG S, et al. Technologies of control-by-wire and dynamic domain control for automotive chassis[J]. Journal of Automotive Safety and Energy, 2020, 11(2): 143-160. | |
| 6 | ATAEI M, KHAJEPOUR A, JEON S. Model predictive control for integrated lateral stability, traction/braking control, and rollover prevention of electric vehicles[J]. Vehicle System Dynamics, 2020, 58(1): 49-73. |
| 7 | YU G, WONG P K, ZHAO J, et al. Design of an acceleration redistribution cooperative strategy for collision avoidance system based on dynamic weighted multi-objective model predictive controller[J]. IEEE Transactions on Intelligent Transportation Systems, 2021. |
| 8 | HE D, SHI Y, SONG X. Weight-free multi-objective predictive cruise control of autonomous vehicles in integrated perturbation analysis and sequential quadratic programming optimization framework[J]. Journal of Dynamic Systems, Measurement, and Control, 2019, 141(9). |
| 9 | 张一鸣, 周兵, 吴晓建, 等. 基于前车轨迹预测的高速智能车运动规划[J]. 汽车工程, 2020, 42(5): 574-580. |
| ZHANG Y M, ZHOU B, WU X J, et al. Motion planning of high speed intelligent vehicle based on front vehicle trajectory prediction[J]. Automotive Engineering, 2020, 42(5): 574-580. | |
| 10 | HU B B, ZHANG H T, WANG J. Multiple-target surrounding and collision avoidance with second-order nonlinear multiagent systems[J]. IEEE Transactions on Industrial Electronics, 2020, 68(8): 7454-7463. |
| 11 | 李亚勇, 蔡英凤, 陈龙, 等. 考虑前后方车辆行驶状态的ACC系统控制方法[J]. 汽车工程, 2019, 41(8): 865-871. |
| LI Y Y, CAI Y F, CHEN L, et al. ACC method considering driving state of front and rear vehicles[J]. Automotive Engineering, 2019, 41(8): 865-871. | |
| 12 | LIU S, WANG X, HASSANIN O, et al. Calibration and evaluation of responsibility-sensitive safety (RSS) in automated vehicle performance during cut-in scenarios[J]. Transportation Research Part C: Emerging Technologies, 2021, 125: 103037. |
| 13 | 钟文沁, 孔伟伟, 李志恒, 等. 不同渗透率下非信控交叉路口混合预约多车协同控制[J]. 汽车工程, 2022, 44(8): 1144-1152. |
| ZHONG W Q, KONG W W, LI Z H, et al. Reservation based multi-vehicle cooperative control at traffic-lightless intersection under different penetration of mixed traffic flow[J]. Automotive Engineering, 2022, 44(8): 1144-1152. | |
| 14 | 吴晓建, 燕冬, 王爱春, 等. 融合前车轨迹预测的改进人工势场轨迹规划研究[J]. 汽车工程, 2021, 43(12): 1752-1761. |
| WU X J, YAN D, WANG A C, et al. Research on improved artificial potential field path planning integrating prediction of preceding vehicle trajectory[J]. Automotive Engineering, 2021, 43(12): 1752-1761. | |
| 15 | HASHEMI E, PIRANI M, KHAJEPOUR A, et al. A comprehensive study on the stability analysis of vehicle dynamics with pure/combined-slip tyre models[J]. Vehicle System Dynamics, 2016, 54(12): 1736-1761. |
| 16 | BURCKHARDT M. Fahrwerktechnik: Radschlupf-Regelsysteme, 1993[J]. Vogel-Verlag, Wurtzburg, 1993, 36. |
| 17 | QIN Y, ZHAO Z, WANG Z, et al. Study of longitudinal–vertical dynamics for in-wheel motor-driven electric vehicles[J]. Automotive Innovation, 2021, 4(2): 227-237. |
| 18 | ZHANG Y, XU M, QIN Y, et al. MILE: multi-objective integrated model predictive adaptive cruise control for intelligent vehicle[J]. IEEE Transactions on Industrial Informatics, 2022. |
| 19 | QIN Y, HASHEMI E, KHAJEPOUR A. Integrated crash avoidance and mitigation algorithm for autonomous vehicles[J]. IEEE Transactions on Industrial Informatics, 2021, 17(11): 7246-7255. |
| 20 | ZANELLI A, DOMAHIDI A, JEREZ J, et al. FORCES NLP: an efficient implementation of interior-point methods for multistage nonlinear nonconvex programs[J]. International Journal of Control, 2020, 93(1): 13-29. |
| 21 | 丛森森, 高峰, 许述财. 基于动态稳定域的车辆横纵向稳定性协同控制[J]. 汽车工程, 2022, 44(6): 900-908. |
| CONG S S, GAO F, XU S C. Cooperative control of vehicle lateral and longitudinal stability based on dynamic stability region[J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [1] | Junlong Qu,Wenku Shi,Zhiyong Chen. Excitation Identification and Attenuation Measures of Torsional Vibration in Automotive Driveline System [J]. Automotive Engineering, 2022, 44(2): 264-271. |
| [2] | Wen Sun,Chenyang Li,Junnian Wang,Haozhe Qian,Wentong Zhang. Research on Ride Comfort of an Off-road Vehicle with Compound Suspension [J]. Automotive Engineering, 2022, 44(1): 105-114. |
| [3] | Anjie Wang,Ling Zheng,Yinong Li,Kan Wang. Motion Planning for Active Collision Avoidance of Intelligent Vehicles Based on Predictive Risk Field [J]. Automotive Engineering, 2021, 43(7): 1096-1104. |
| [4] | Xingjia Li,Jianfen Li,Min Zhu,Nengling Peng,Shuai Zuo. Research on Positioning Fusion and Verification Algorithm Based on UKF [J]. Automotive Engineering, 2021, 43(6): 825-832. |
| [5] | Hu Yuanzhi, Zhu Hongxu, Zeng Xianjing, Wang Zhenfei, Xu Zihong, Jiang Chengyue. An Analysis on the Effect of Active Retractor Parameters on Occupant's Out-of-position Displacement Under Braking Condition [J]. Automotive Engineering, 2020, 42(5): 615-620. |
| [6] | Zhu Shaopeng, Jiang Xudong, Wang Yanran, Ye Xingyu, Yu Kai, Xu Linfeng. Research on Parallel Braking Control of Distributed Four-wheel-drive Electric Vehicle [J]. Automotive Engineering, 2020, 42(11): 1506-1512. |
| [7] | Liu Zhiqiang ,Liu Guang. Simulation and Test of Stability Control for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2019, 41(7): 792-799. |
| [8] | Ren Yue, Zheng Ling, Zhang Wei, Yang Wei , Xiong Zhoubing. A Study on Active Collision Avoidance Control of Autonomous Vehicles Based on Model Predictive Control [J]. Automotive Engineering, 2019, 41(4): 404-410. |
| [9] | Hu Yuanzhi, Yang Xicun, Liu Xi & Huang Ling. Hierarchic Braking Strategy for Active Collision Avoidance and Its Verification Based on Drivers Characteristics [J]. , 2019, 41(3): 298-306. |
| [10] | Wang Hongliang, Peng Pai, Gu Wenhao. Simulation and Experiment of Hill-start of EPB with Logic Threshold Control [J]. , 2018, 40(11): 1302-1307. |
| [11] | Wu Jun, Chen Gang. Multi-mode Switching Control for Robot Driven Vehicles [J]. , 2018, 40(10): 1215-1222. |
|