Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (8): 1417-1427.doi: 10.19562/j.chinasae.qcgc.2023.08.012
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2023年
Previous Articles Next Articles
Lin Hu1,Gen Li1,Fang Wang1( ),Miao Lin2,Ning Wu3
),Miao Lin2,Ning Wu3
Received:2023-02-01
Revised:2023-03-05
Online:2023-08-25
Published:2023-08-17
Contact:
Fang Wang
E-mail:wangfang83715@163.com
Lin Hu,Gen Li,Fang Wang,Miao Lin,Ning Wu. Research on Test Scenarios of Passenger Cars and Two-Wheelers at Intersections Based on CIDAS Accident Data[J].Automotive Engineering, 2023, 45(8): 1417-1427.
"
| 变量编码 | 描述 | 取值 | 选取原因 |
|---|---|---|---|
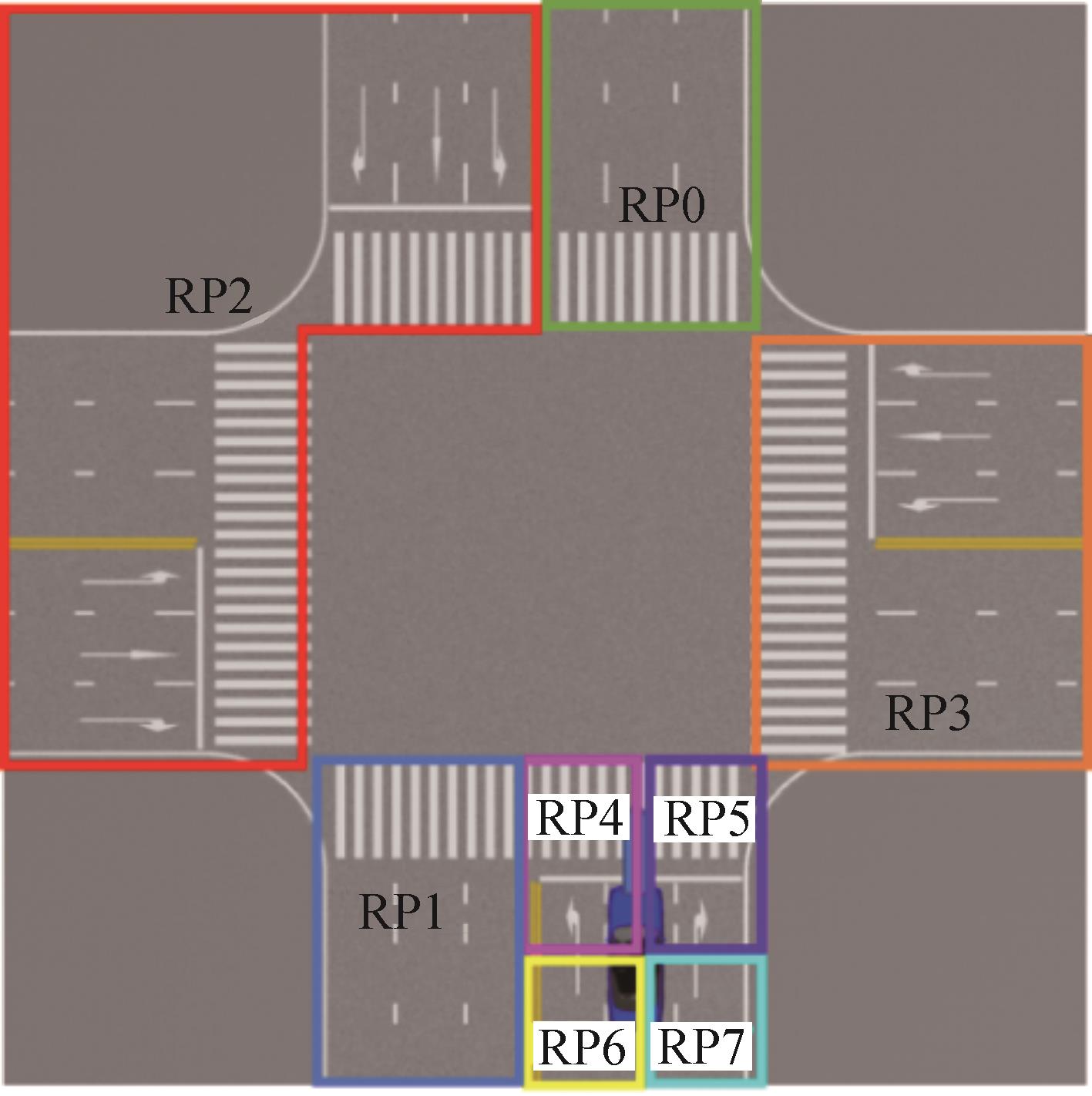
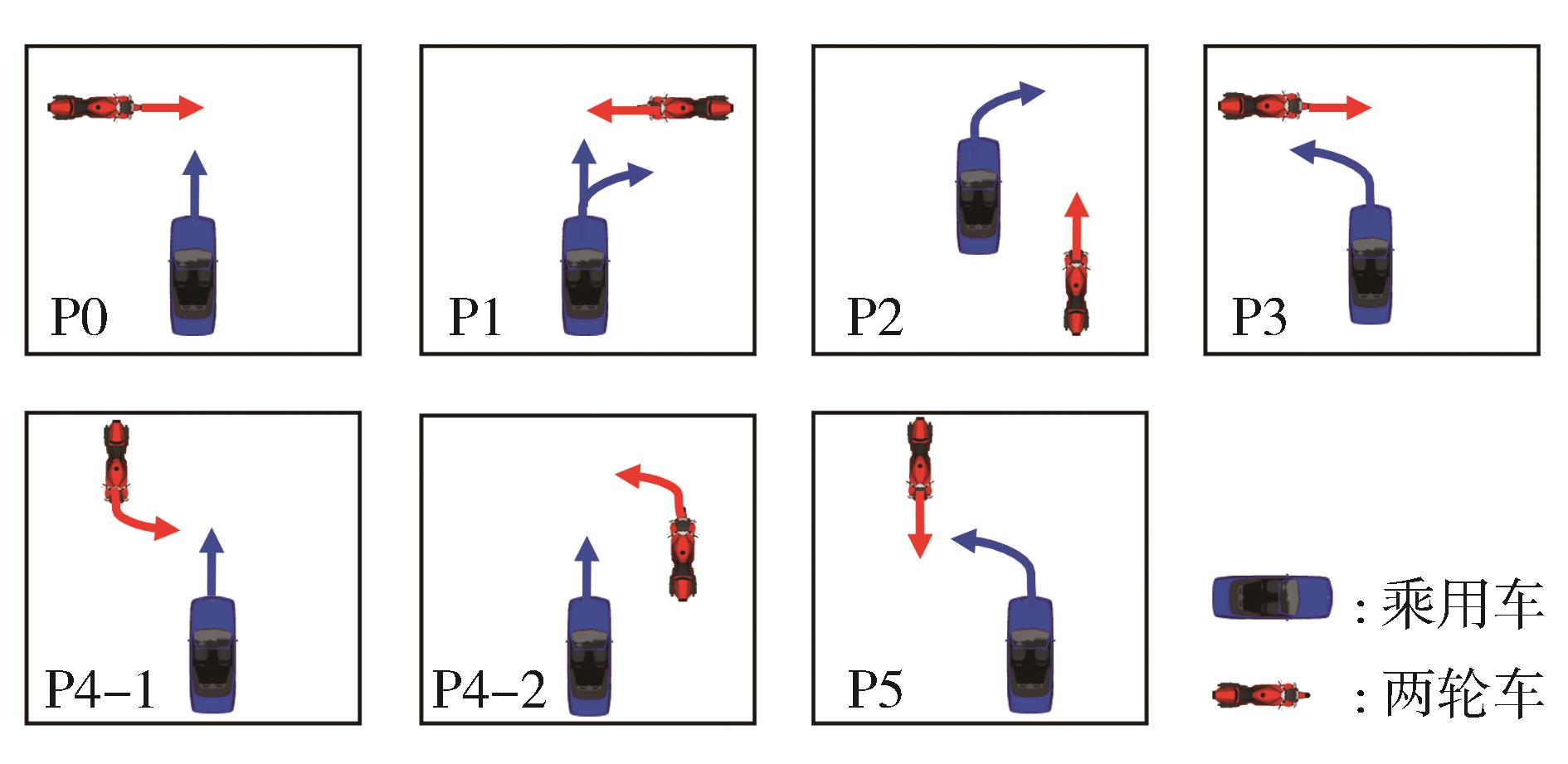
| Re_pos | 路口两轮车 对乘用车的 相对位置 | RP0 | 相对位置、速度大小、运动状态及相对速度方向用于确定预碰撞初始状态。此外,参与方的运动状态、速度和形态特征会影响测试时对两轮车的目标识别和跟踪。 |
| RP1 | |||
| RP2 | |||
| RP3 | |||
| RP4 | |||
| RP5 | |||
| RP6 | |||
| RP7 | |||
| Motion_V | 乘用车 运动状态 | 直行 | |
| 左转 | |||
| 右转 | |||
| Motion_T | 两轮车 运动状态 | 直行 | |
| 左转 | |||
| 右转 | |||
| Re_dir | 参与方相对 速度方向 | 同向 | |
| 反向 | |||
| 相互垂直 | |||
| Velocity_V | 乘用车速度 | 常数 | |
| Velocity_T | 两轮车速度 | 常数 | |
| T_Type | 两轮车类型 | 自行车 | |
| 电动两轮车 | |||
| 两轮摩托车 | |||
| Time | 时间 | 白天 | 外部环境条件影响环境感知系统,本文中两轮车测试场景提取的研究须考虑这些极端情况。 |
| 夜晚 | |||
| Weather | 天气 | 下雨 | |
| 无雨 | |||
Visual_ obstruction | 车外视野 障碍 | 有 | |
| 无 | |||
| Road_type | 路口类型 | T字路口 | 道路状况影响测试车行为决策。 |
| 十字路口 | |||
| Traffic_light | 交通灯 装配情况 | 有 | |
| 无 |

"
"

"

"
| 变量字段 | 取值 | 簇群 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| S0 | S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | 总计 | ||
| T_type | 自行车 | 12 | 29 | 14 | 13 | 1 | 9 | 17 | 3 | 9 | 107 |
| 电动两轮车 | 130 | 102 | 54 | 11 | 72 | 84 | 98 | 80 | 91 | 722 | |
| 两轮摩托车 | 27 | 48 | 15 | 118 | 20 | 39 | 58 | 62 | 23 | 410 | |
| Road_type | T字路口 | 149 | 74 | 59 | 102 | 43 | 43 | 87 | 111 | 25 | 693 |
| 十字路口 | 20 | 105 | 24 | 40 | 50 | 89 | 86 | 34 | 98 | 546 | |
| Time | 夜晚 | 25 | 29 | 17 | 105 | 20 | 132 | 0 | 30 | 0 | 358 |
| 白天 | 144 | 150 | 66 | 37 | 73 | 0 | 173 | 115 | 123 | 881 | |
| Re_pos | RP0 | 1 | 4 | 3 | 12 | 1 | 3 | 0 | 0 | 0 | 24 |
| RP1 | 0 | 0 | 0 | 4 | 0 | 3 | 0 | 0 | 0 | 7 | |
| RP2 | 36 | 0 | 3 | 21 | 22 | 103 | 173 | 0 | 123 | 481 | |
| RP3 | 102 | 175 | 1 | 4 | 0 | 23 | 0 | 0 | 0 | 305 | |
| RP4 | 1 | 0 | 24 | 87 | 62 | 0 | 0 | 0 | 0 | 174 | |
| RP5 | 0 | 0 | 0 | 14 | 4 | 0 | 0 | 7 | 0 | 25 | |
| RP6 | 29 | 0 | 52 | 0 | 4 | 0 | 0 | 0 | 0 | 85 | |
| RP7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 138 | 0 | 138 | |
| Motion_V | 直行 | 0 | 179 | 79 | 19 | 13 | 106 | 119 | 0 | 84 | 599 |
| 左转 | 9 | 0 | 0 | 121 | 74 | 22 | 54 | 7 | 18 | 305 | |
| 右转 | 160 | 0 | 4 | 2 | 6 | 4 | 0 | 138 | 21 | 335 | |
| Motion_T | 直行 | 163 | 159 | 0 | 125 | 76 | 114 | 160 | 145 | 114 | 1 056 |
| 左转 | 4 | 16 | 77 | 15 | 16 | 13 | 7 | 0 | 7 | 155 | |
| 右转 | 2 | 4 | 6 | 2 | 1 | 5 | 6 | 0 | 2 | 25 | |
| Re_dir | 同向 | 2 | 0 | 63 | 23 | 6 | 6 | 1 | 145 | 0 | 246 |
| 反向 | 30 | 4 | 20 | 106 | 87 | 3 | 0 | 0 | 0 | 250 | |
| 垂直 | 137 | 175 | 0 | 13 | 0 | 123 | 172 | 0 | 123 | 743 | |
| Weather | 无雨 | 149 | 160 | 78 | 135 | 83 | 116 | 156 | 135 | 110 | 1 122 |
| 有雨 | 20 | 19 | 5 | 7 | 10 | 16 | 17 | 10 | 13 | 117 | |
| Trafic_light | 无 | 153 | 130 | 67 | 118 | 24 | 43 | 173 | 111 | 0 | 819 |
| 有 | 16 | 49 | 16 | 24 | 69 | 89 | 0 | 34 | 123 | 420 | |
| Visual_obstruction | 无 | 143 | 144 | 78 | 130 | 80 | 122 | 130 | 136 | 104 | 1 067 |
| 有 | 26 | 35 | 5 | 12 | 13 | 10 | 43 | 9 | 19 | 172 | |
| 总计 | 169 | 179 | 83 | 142 | 93 | 132 | 173 | 145 | 123 | 1 239 | |

"
"
| 变量字段 | 取值 | 簇群 | ||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 总计 | ||
| Re_pos | RP0 | 11 | 0 | 1 | 0 | 4 | 8 | 24 |
| RP1 | 5 | 0 | 2 | 0 | 0 | 0 | 7 | |
| RP2 | 344 | 0 | 1 | 136 | 0 | 120 | 601 | |
| RP3 | 0 | 301 | 2 | 0 | 2 | 0 | 305 | |
| RP4 | 0 | 0 | 0 | 0 | 54 | 0 | 54 | |
| RP5 | 0 | 0 | 25 | 0 | 0 | 0 | 25 | |
| RP6 | 2 | 0 | 32 | 0 | 51 | 0 | 85 | |
| RP7 | 0 | 0 | 138 | 0 | 0 | 0 | 138 | |
| Motion_V | 直行 | 301 | 194 | 0 | 0 | 104 | 0 | 599 |
| 左转 | 0 | 16 | 27 | 136 | 2 | 128 | 309 | |
| 右转 | 61 | 91 | 174 | 0 | 5 | 0 | 331 | |
| Motion_T | 直行 | 333 | 274 | 198 | 125 | 0 | 126 | 1 056 |
| 左转 | 23 | 21 | 0 | 5 | 105 | 1 | 155 | |
| 右转 | 6 | 6 | 3 | 6 | 6 | 1 | 28 | |
| Re_dir | 同向 | 5 | 0 | 168 | 10 | 62 | 1 | 246 |
| 反向 | 12 | 0 | 33 | 29 | 49 | 127 | 250 | |
| 垂直 | 345 | 301 | 0 | 97 | 0 | 0 | 743 | |
| 总计 | 362 | 301 | 201 | 136 | 111 | 128 | 1 239 | |
"
| 变量字段 | 取值 | 簇群 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| J0 | J1 | J2 | J3 | J4 | C0 | C1 | C2 | C3 | 总计 | ||
| T_type | 自行车 | 28 | 11 | 8 | 11 | 5 | 24 | 5 | 15 | 0 | 107 |
电动 两轮车 | 183 | 11 | 69 | 54 | 78 | 110 | 65 | 152 | 0 | 722 | |
两轮 摩托车 | 21 | 109 | 27 | 17 | 61 | 0 | 39 | 45 | 91 | 410 | |
| Time | 夜晚 | 32 | 116 | 22 | 11 | 18 | 27 | 109 | 0 | 23 | 358 |
| 白天 | 200 | 15 | 82 | 71 | 126 | 107 | 0 | 212 | 68 | 881 | |
| Pre_scenario | P0 | 0 | 17 | 104 | 0 | 0 | 63 | 48 | 89 | 41 | 362 |
| P1 | 154 | 11 | 0 | 0 | 0 | 44 | 19 | 49 | 24 | 301 | |
| P 2 | 0 | 17 | 0 | 0 | 144 | 3 | 8 | 24 | 5 | 201 | |
| P 3 | 0 | 13 | 0 | 82 | 0 | 11 | 7 | 20 | 3 | 136 | |
| P 4 | 57 | 16 | 0 | 0 | 0 | 12 | 8 | 16 | 2 | 111 | |
| P 5 | 21 | 57 | 0 | 0 | 0 | 1 | 19 | 14 | 16 | 128 | |
| Weather | 无雨 | 206 | 121 | 98 | 72 | 134 | 121 | 99 | 190 | 81 | 1 122 |
| 有雨 | 26 | 10 | 6 | 10 | 10 | 13 | 10 | 22 | 10 | 117 | |
| Trafic_light | 无 | 199 | 111 | 84 | 68 | 132 | 134 | 0 | 0 | 91 | 819 |
| 有 | 33 | 20 | 20 | 14 | 12 | 0 | 109 | 212 | 0 | 420 | |
Visual_ obstruction | 无 | 207 | 120 | 87 | 69 | 130 | 94 | 100 | 184 | 76 | 1 067 |
| 有 | 25 | 11 | 17 | 13 | 14 | 40 | 9 | 28 | 15 | 172 | |
| 总计 | 232 | 131 | 104 | 82 | 144 | 134 | 109 | 212 | 91 | 1 239 | |

"
"
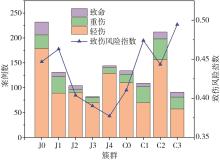
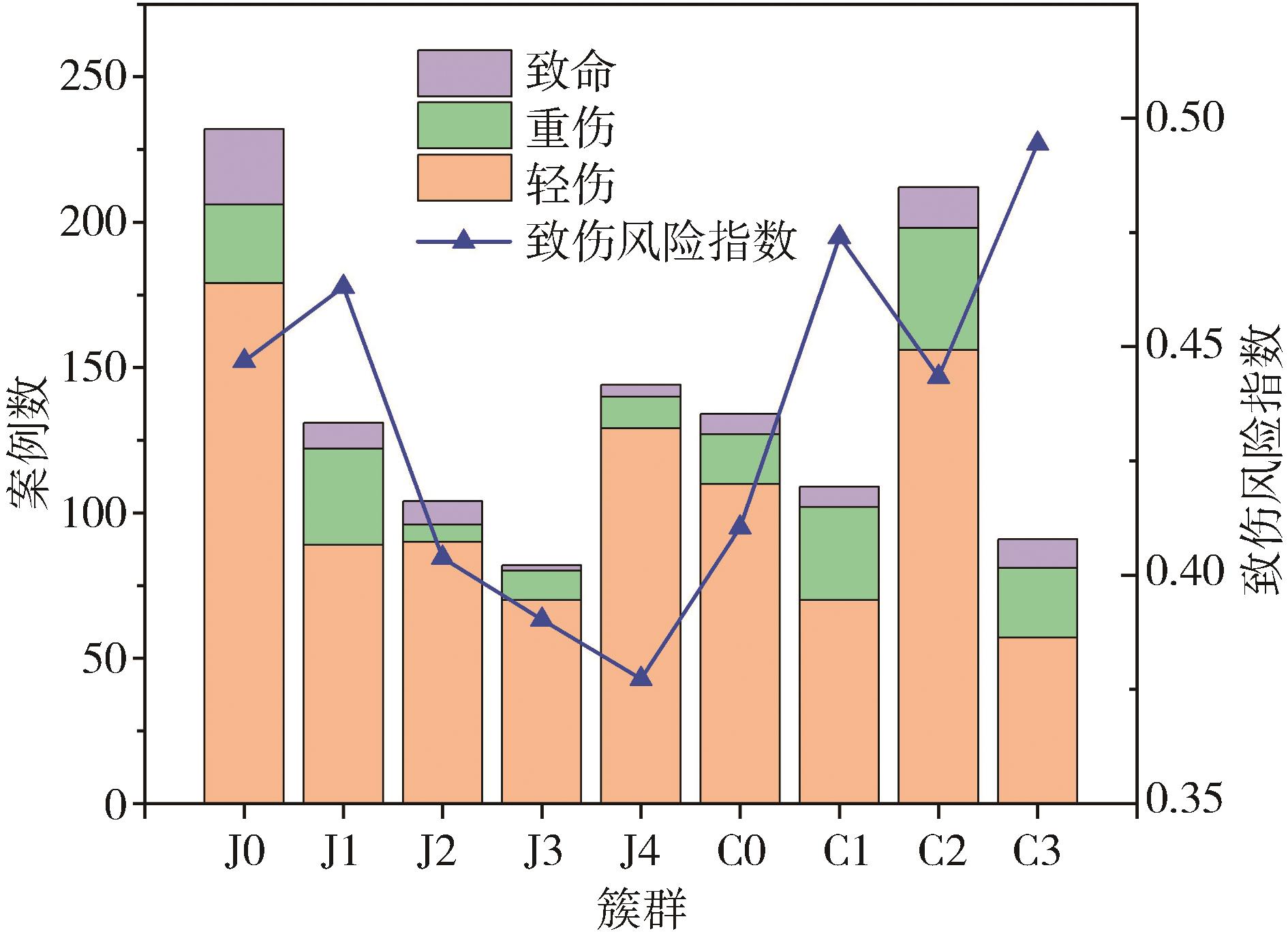
| 场景编码 | 图片描述 | 致伤风险指数 | 文字描述 |
|---|---|---|---|
| J0 |  | 0.447 | 白天在无红绿灯的T字路口,一辆直行/右转的乘用车与来自右侧逆行的电动两轮车相撞(v1=20-40 km/h、v2=17-22 km/h)。 |
| J1 |  | 0.463 | 夜晚在无红绿灯的T字路口,一辆左转的乘用车与对向直行两轮摩托车相撞(v1=20-38 km/h、v2=20-40 km/h)。 |
| J2 | 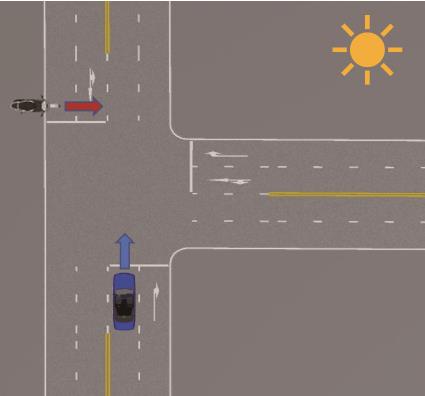 | 0.402 | 白天在无红绿灯的T字路口,一辆直行乘用车与前方从左横过马路的电动两轮车相撞(v1=20-40 km/h、v2=16-27 km/h)。 |
| J3 | 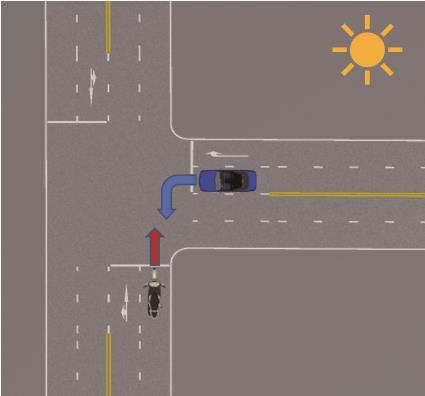 | 0.39 | 白天在无红绿灯的T字路口,一辆左转乘用车与左方直行电动两轮车相撞(v1=18-35 km/h、v2=17-30 km/h)。 |
| J4 |  | 0.377 | 白天在无红绿灯的T字路口,右转乘用车与右后方直行两轮电动车/摩托车发生追尾(v1=15-30 km/h、v2=20-30 km/h)。 |
| C0-1 | 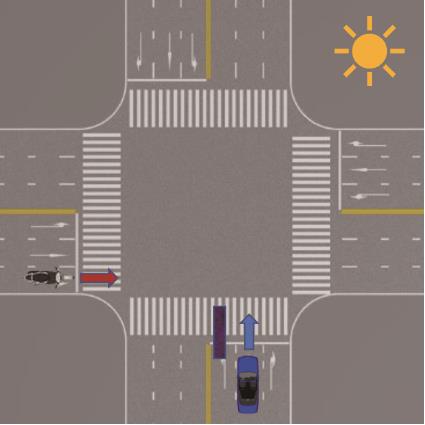 | 0.41 | 白天在无红绿灯的十字路口,直行乘用车由于视野障碍与左侧直行电动两轮车相撞(v1=20-40 km/h、v2=10-23 km/h)。 |
| C0-2 | 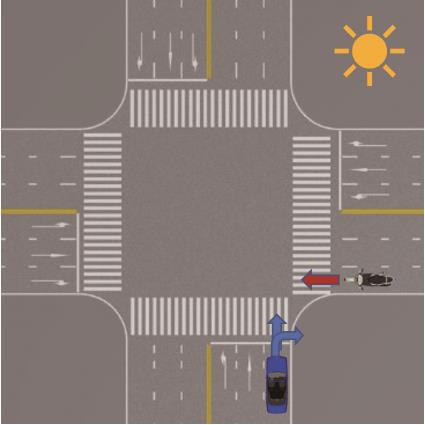 | 0.41 | 白天在无红绿灯的十字路口,一辆直行/右转的乘用车与右侧逆行的电动两轮车相撞(v1=20-40 km/h、v2=10-23 km/h)。 |
| C1 |  | 0.474 | 夜晚在有红绿灯的十字路口,直行乘用车与左侧直行两轮电动车/摩托车垂直相撞(v1=23-42 km/h、v2=20-30 km/h)。 |
| C2 | 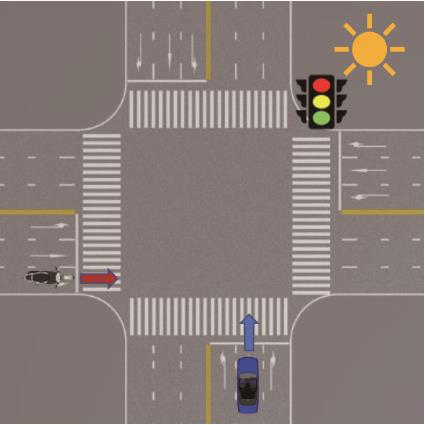 | 0.443 | 白天在有红绿灯的十字路口,直行乘用车与左侧直行两轮电动车垂直相撞(v1=20-40 km/h、v2=15-30 km/h)。 |
| C3 | 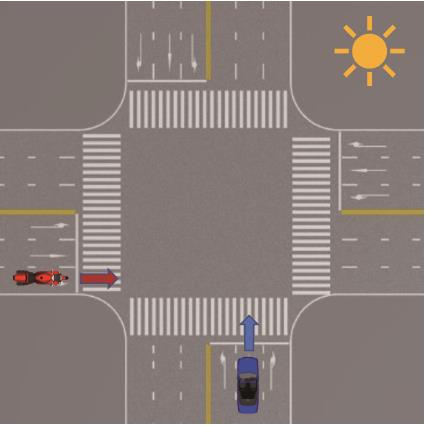 | 0.495 | 白天在无红绿灯的十字路口,直行乘用车与左侧直行两轮摩托车垂直相撞(v1=20-40 km/h、v2=25-40 km/h)。 |

"
"
| 1 | 国家统计局. 2020年年度道路交通事故统计数据[EB/OL]. http: //www. stats. gov. cn. |
| 2 | HU L, HU X, WANG J, et al. Casualty risk of e-bike rider struck by passenger vehicle using China in-depth accident data[J]. Traffic Injury Prevention, 2020, 21(4): 283-287. |
| 3 | HADJIDIMITRIOU N S, LIPPI M, DELL’AMICO M, et al. Machine learning for severity classification of accidents involving powered two wheelers[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(10): 4308-4317. |
| 4 | HU L, BAO X, LIN M, et al. Research on risky driving behavior evaluation model based on CIDAS real data[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(8): 2176-2187. |
| 5 | CHARRAN R S, DUBEY R K. Two-wheeler vehicle traffic violations detection and automated ticketing for indian road scenario[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 22002-22007. |
| 6 | HU L, TIAN Q, ZOU C, et al. A study on energy distribution strategy of electric vehicle hybrid energy storage system considering driving style based on real urban driving data[J]. Renewable and Sustainable Energy Reviews, 2022, 162: 112416. |
| 7 | 朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| ZHU Bing, ZHANG Peixing, ZHAO Jian, et al. Review of scenario-based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. | |
| 8 | Euro NCAP. Test protocol AEB VRU systems[EB/OL]. Available: https://cdn.euroncap.com/media/75436/euro-ncap-aeb-lss-vru-test-protocol-v43.pdf. |
| 9 | C-NCAP. Testing protocol for active security system[EB/OL]. Available: https://www.c-ncap.org.cn/download. |
| 10 | CHANG F, HAQUE M M, YASMIN S, et al. Crash injury severity analysis of E-Bike riders: a random parameters generalized ordered probit model with heterogeneity in means[J]. Safety Science, 2022, 146: 105545. |
| 11 | HU L, LI H, YI P, et al. Investigation on AEB key parameters for improving car to two-wheeler collision safety using in-depth traffic accident data[J]. IEEE Transactions on Vehicular Technology, 2022. |
| 12 | ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving[C]. 2015 IEEE 18th International Conference on Intelligent Transportation Systems. IEEE, 2015: 982-988. |
| 13 | 胡林, 易平, 黄晶, 等. 基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J]. 汽车工程, 2018, 40(12): 1435-1446. |
| HU L, YI P, HUANG J, et al. A research on test scenes of two-wheeled vehicles for automatic emergency braking system based on real accident cases[J]. Automot. Eng., 2018, 40(12): 1435-1446. | |
| 14 | PAN D, HAN Y, JIN Q, et al. Study of typical electric two‐wheelers pre-crash scenarios using K-medoids clustering methodology based on video recordings in China[J]. Accident Analysis & Prevention, 2021, 160: 106320. |
| 15 | SUI B, LUBBE N, BÄRGMAN J. A clustering approach to developing car-to-two-wheeler test scenarios for the assessment of automated emergency braking in China using in-depth Chinese crash data[J]. Accident Analysis & Prevention, 2019, 132: 105242. |
| 16 | CAO Y, XIAO L, DONG H, et al. Typical pre-crash scenarios reconstruction for two-wheelers and passenger vehicles and its application in parameter optimization of AEB system based on NAIS database[C]. 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV), 2019. |
| 17 | ATALAR D, THOMAS P. Powered two-wheeler crash scenario development[J]. Accident Analysis & Prevention, 2019, 125: 198-206. |
| 18 | HU W, XU X, ZHOU Z, et al. Mining and comparative analysis of typical pre-crash scenarios from IGLAD[J]. Accident Analysis & Prevention, 2020, 145: 105699. |
| 19 | SANDER U, LUBBE N. The potential of clustering methods to define intersection test scenarios: assessing real-life performance of AEB[J]. Accident Analysis & Prevention, 2018, 113: 1-11. |
| 20 | NITSCHE P, THOMAS P, STUETZ R, et al. Pre-crash scenarios at road junctions: a clustering method for car crash data[J]. Accident Analysis & Prevention, 2017, 107: 137-151. |
| 21 | CRAMER H. Mathematical methods of statistics[M]. Princeton University Press, 1999. |
| 22 | HAMMING R W. Error detecting and error correcting codes[J]. The Bell System Technical Journal, 1950, 29(2): 147-160. |
| 23 | VIJAY R, MAHAJAN P, KANDWAL R. Hamming distance based clustering algorithm[J]. International Journal of Information Retrieval Research (IJIRR), 2012, 2(1): 11-20. |
| 24 | ROUSSEEUW P J. Silhouettes: a graphical aid to the interpretation and validation of cluster analysis[J]. Journal of Computational and Applied Mathematics, 1987, 20: 53-65. |
| 25 | HAN J, PEI J, TONG H. Data mining: concepts and techniques[M]. Morgan Kaufmann, 2022. |
| 26 | HU L, HU X, WAN J, et al. The injury epidemiology of adult riders in vehicle-two-wheeler crashes in China, Ningbo, 2011-2015[J]. Journal of Safety Research, 2020, 72: 21-28. |
| 27 | SANTOS K, DIAS J P, AMADO C, et al. Risk factors associated with the increase of injury severity of powered two wheelers road accidents victims in Portugal[J]. Traffic Injury Prevention, 2021, 22(8): 646-650. |
| 28 | 工业与信息化部. 电动自行车安全技术规范: GB 17761—2018 [S]. 2019. |
| Ministry of Industry and Information Technology. Safety technical specification for eletric bicycle:GB 17761—2018[S]. 2019. | |
| 29 | HU L, ZHONG Y, HAO W, et al. Optimal route algorithm considering traffic light and energy consumption[J]. IEEE Access, 2018, 6: 59695-59704. |
| 30 | ZADOBRISCHI E, COSOVANU L M, DIMIAN M. Traffic flow density model and dynamic traffic congestion model simulation based on practice case with vehicle network and system traffic intelligent communication[J]. Symmetry, 2020, 12(7): 1172. |
| 31 | SUN C, GUANETTI J, BORRELLI F, et al. Optimal eco-driving control of connected and autonomous vehicles through signalized intersections[J]. IEEE Internet of Things Journal, 2020, 7(5): 3759-3773. |
| 32 | XIAO J, HUANG Z, LI Y, et al. Study on the occlusion of the visibility window on highway exit ramps[J]. The International Journal of Electrical Engineering & Education, 2021: 0020720921999771. |
| [1] | Yong Han,Liya Lin,Yong He,Di Pan,Hongyu Cai,Qian Peng,Hao Feng. Research on the Effects of Emergent Avoidance Postures of Electric Two-wheeler Riders on Their Injury Risk [J]. Automotive Engineering, 2022, 44(5): 764-770. |
| [2] | Zhu Bing, Zhang Peixing, Zhao Jian. Clustering Evaluation Method of Autonomous Driving Safety for Multi-dimensional Logical Scenario [J]. Automotive Engineering, 2020, 42(11): 1458-1463. |
| [3] | Hu Lin, Yi Ping, Huang Jing, Zhang Xin, Lei Zhengbao. A Research on Test Scenes of Two-wheeled Vehicles for Automatic Emergency Braking System Based on Real Accident Cases [J]. , 2018, 40(12): 1435-1446. |