Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (9): 1721-1730.doi: 10.19562/j.chinasae.qcgc.2025.09.008
Yong Han1,2( ),Jiale Zhang1,2,Di Pan1,2,He Wu3,Li Xu4
),Jiale Zhang1,2,Di Pan1,2,He Wu3,Li Xu4
Received:2025-02-25
Revised:2025-03-31
Online:2025-09-25
Published:2025-09-19
Contact:
Yong Han
E-mail:Yonghan@xmut.edu.cn
Yong Han,Jiale Zhang,Di Pan,He Wu,Li Xu. Quantitative Assessment of Vehicle-VRUs Collision Risk at Intersection with Visual Obstacle[J].Automotive Engineering, 2025, 47(9): 1721-1730.
"
| 特征名称 | 特征名称缩写 | 特征类型 | |
|---|---|---|---|
车辆与障碍物 运动学特征 | 车辆速度 | VSpd | 连续变量 |
| 车辆加速度 | VAcc | 连续变量 | |
| 障碍物速度 | OSpd | 连续变量 | |
| 障碍物加速度 | OAcc | 连续变量 | |
| 碰撞时间 | TTC | 连续变量 | |
| 道路环境特征 | 信号灯状态 | SigS | 有序分类变量 |
| 有无分隔栏 | DivAvl | 二分类变量 | |
| 有无人行横道 | CWAvl | 二分类变量 | |
| 车道数 | OWLNum | 有序分类变量 | |
"
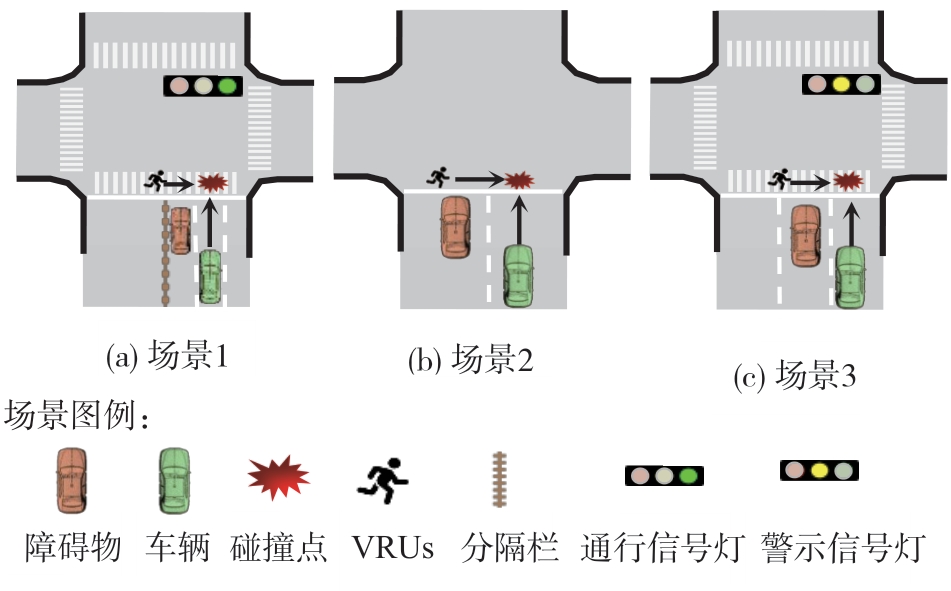
| 信号灯状态 | 状态代码 | 状态详情 |
|---|---|---|
| 无信号灯 | 0 | 十字路口无交通信号灯 |
| 通行信号状态 | 1 | 十字路口存在交通信号灯,车辆正常通行,VRU横穿路口处于危险状态 |
| 警示信号状态 | 2 | 路口交通信号灯处于信号变换阶段,车辆与VRUs发生冲突 |

"
"
"
"
道路环境 特征 | Cluster 0 vs 1 | Cluster 0 vs 2 | Cluster 1 vs 2 |
|---|---|---|---|
| P* | P | P | |
| SigS | <0.001 | <0.001 | <0.001 |
| DivAvl | <0.001 | <0.001 | <0.001 |
| CWAvl | <0.001 | 0.558 | <0.001 |
| OWLNum | <0.001 | 0.001 | <0.001 |
"
"

"
"
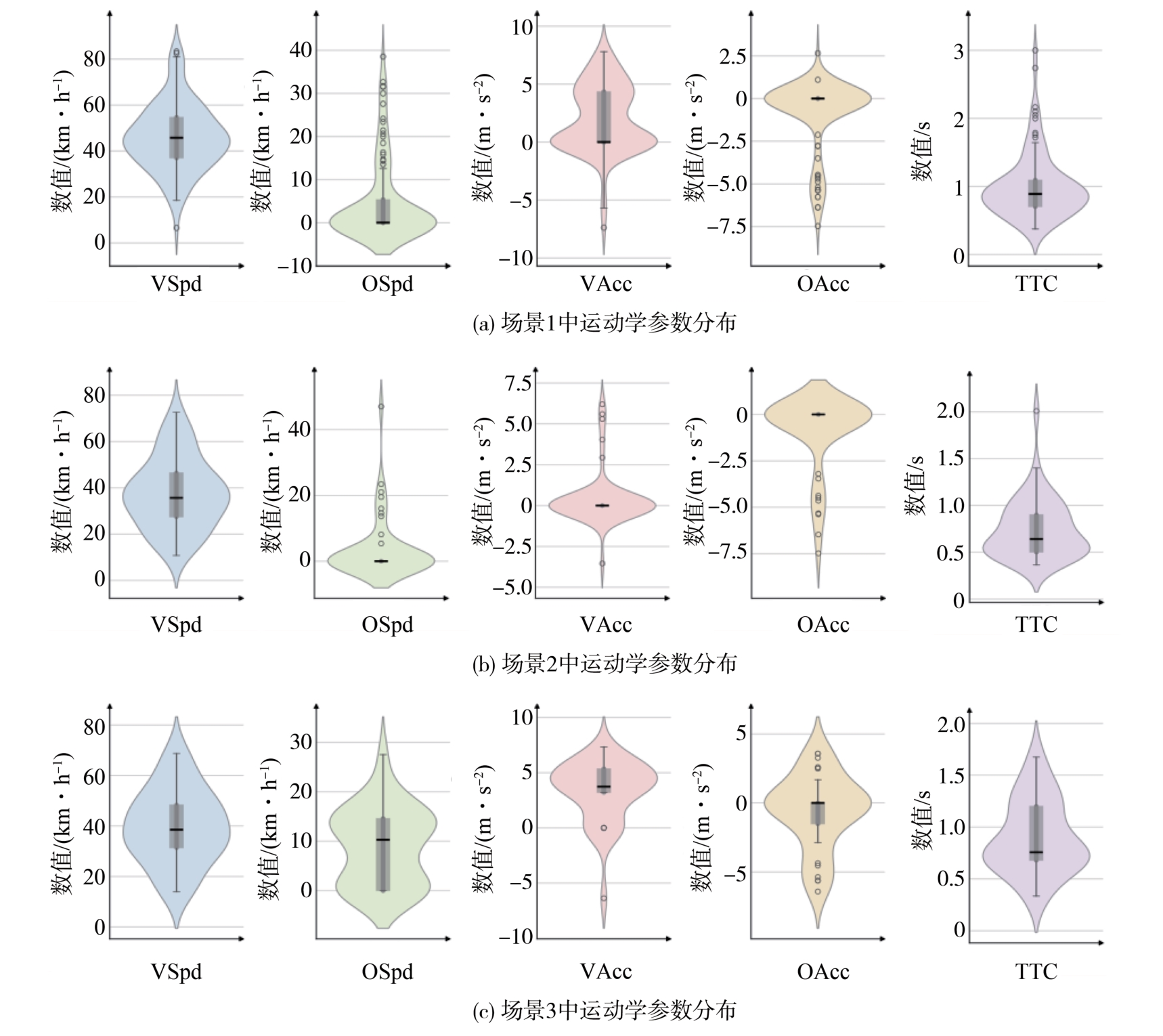
| 运动学参数 | 场景1 | 场景2 | 场景3 |
|---|---|---|---|
| P* | P | P | |
| VSpd | <0.001 | 0.023 | 0.148 |
| VAcc | 0.022 | <0.001 | <0.001 |
| OSpd | <0.001 | <0.001 | 0.055 |
| OAcc | <0.001 | <0.001 | 0.190 |
| TTC | <0.001 | <0.001 | 0.025 |
"
| 运动学参数 | CWAvl | DivAvl | SigS | OWLNum |
|---|---|---|---|---|
| P* | P | P | P | |
| VSpd | 0.025 | <0.905 | 0.870 | <0.001 |
| VAcc | 0.129 | <0.921 | <0.001 | <0.001 |
| OSpd | <0.001 | <0.001 | 0.007 | <0.001 |
| OAcc | 0.063 | 0.028 | 0.672 | 0.018 |
| TTC | 0.558 | 0.096 | 0.594 | 0.202 |
"
| 运动学参数 | CWAvl | DivAvl | SigS | OWLNum |
|---|---|---|---|---|
| P* | P | P | P | |
| VSpd | 0.026 | 0.207 | 0.381 | <0.001 |
| VAcc | 0.748 | 0.302 | <0.001 | <0.001 |
| OSpd | 0.389 | 0.013 | <0.001 | <0.001 |
| OAcc | 0.540 | 0.153 | 0.086 | <0.001 |
| TTC | 0.987 | 0.930 | 0.724 | 0.058 |
"
| 运动学参数 | CWAvl | OWLNum | SigS | DivAvl |
|---|---|---|---|---|
| P* | P | P | P | |
| VSpd | 0.440 | 0.047 | 0.591 | |
| VAcc | 0.459 | 0.990 | 0.118 | |
| OSpd | 0.132 | 0.559 | 0.564 | |
| OAcc | 0.372 | 0.965 | 0.041 | |
| TTC | 0.442 | 0.916 | 0.705 |
"
| 场景 | Vst/ (km?h-1) | Vat/ (m?s-2) | Ost/ (km?h-1) | Oat/ (m?s-2) |
|---|---|---|---|---|
| 场景1 | 45.79 | 0.0 | 0.0 | 0.0 |
| 场景2 | 35.67 | 0.0 | 0.0 | 0.0 |
| 场景3 | 38.52 | 3.74 | 10.29 | 0.0 |
"
| 显著性水平 | 显著性状态 | 权重设计 |
|---|---|---|
| P < 0.001 | 非常显著 | 1.00 |
| 0.001 ≤ P <0.01 | 显著 | 0.75 |
| 0.01 ≤ P < 0.05 | 中等显著 | 0.50 |
| 0.05 < P < 0.1 | 弱显著 | 0.25 |
| P ≥ 0.1 | 不显著 | 0.10 |
"
"
| 场景名称 | WVSpd | WVAcc | WOSpd | WOAcc |
|---|---|---|---|---|
| 场景1 | 0.425 | 0.550 | 0.938 | 0.238 |
| 场景2 | 0.425 | 0.550 | 0.650 | 0.363 |
| 场景3 | 0.200 | 0.100 | 0.100 | 0.200 |
"
| 场景名称 | σVSpd | σVAcc | σOSpd | σOAcc |
|---|---|---|---|---|
| 场景1 | 16.2 | 2.9 | 10.5 | 2.4 |
| 场景2 | 13.6 | 1.5 | 3.7 | 1.1 |
| 场景3 | 16.3 | 2.9 | 9.8 | 2.7 |

"
| [1] | Global status report on road safety 2023[R]. Switzerland: World Health Organization, 2023: 4-9. |
| [2] | ZHANG L, ZHANG Z, WANG Z, et al. Chassis coordinated control for full X-by-wire vehicles-a review[J]. Chinese Journal of Mechanical Engineering, 2021, 34: 1-25. |
| [3] | WOLFF V A, XHOXHI E. Mitigating vulnerable road users occlusion risk via collective perception: an empirical analysis[J]. arXiv preprint arXiv:, 2024. |
| [4] | PEI Y, HOU L. Safety assessment and risk management of urban arterial traffic flow based on artificial driving and intelligent network connection: an overview[J]. Archives of Computational Methods in Engineering, 2024: 1-19. |
| [5] | HARRINGTON S, NAGARAJAN S R, LAU J. An evaluation of the sensitivity of the user-selected forward collision warning distance in a 2017 Honda CR-V[C]. SAE Paper 2023-01-0622. |
| [6] | 韩勇, 孟昕, 潘迪,等. 视觉障碍下十字路口电动两轮车事故特征和典型场景分析[J]. 汽车安全与节能学报, 2023, 14(6): 664-670. |
| HAN Y, MENG X, PAN D, et al. Characteristics and typical scenarios of electric two-wheeler accidents at intersections with visual obstacles[J]. Journal of Automotive Safety and Energy, 2023,14(6): 664-670. | |
| [7] | TYAGI I. Threat assessment for avoiding collsions with perpendicular vehicles at intersections[C].2021 IEEE International Conference on Electro Information Technology (EIT). IEEE, 2021: 184-187. |
| [8] | XIONG X, ZHANG S, CHEN Y. Review of intelligent vehicle driving risk assessment in multi-vehicle interaction scenarios[J]. World Electric Vehicle Journal, 2023, 14(12): 348. |
| [9] | WANG W, WANG W, WAN J, et al. Potential field based path planning with predictive tracking control for autonomous vehicles[C].2019 5th International Conference on Transportation Information and Safety (ICTIS). IEEE, 2019: 746-751. |
| [10] | WANG J, WU J, ZHENG X, et al. Driving safety field theory modeling and its application in pre-collision warning system[J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306-324. |
| [11] | MA Y, ZHANG P, HU B. Active lane-changing model of vehicle in B-type weaving region based on potential energy field theory[J]. Physica A: Statistical Mechanics and its Applications, 2019, 535: 122291. |
| [12] | 何仁, 赵晓聪, 王建强. 人-车-路交互下的驾驶人风险响应度建模[J]. 中国公路学报, 2020, 33(9): 236-250. |
| HE R, ZHAO X, WANG J. Driver risk response modeling under the human-vehicle-road interaction[J]. China Journal of Highway and Transport, 2020, 33(9): 236-250. | |
| [13] | 田野, 裴华鑫, 晏松, 等. 车路协同环境下行车风险场模型的扩展与应用[J]. 清华大学学报(自然科学版), 2022, 62(3): 447-457. |
| TIAN Y, PEI H, YAN S, et al. Extension and application of the vehicle-road collaborative environment driving risk field model[J]. Journal of Tsinghua University (Science and Technology), 2022,62(3): 447-457. | |
| [14] | WANG M, ZHANG L, ZHANG Z, et al. A hybrid trajectory planning strategy for intelligent vehicles in on-road dynamic scenarios[J]. IEEE Transactions on Vehicular Technology, 2022, 72(3): 2832-2847. |
| [15] | LI L, GAN J, JI X, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(1): 122-141. |
| [16] | HAN J, ZHAO J, ZHU B, et al. Spatial-temporal risk field for intelligent connected vehicle in dynamic traffic and application in trajectory planning[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(3): 2963-2975. |
| [17] | TAN H, LU G, LIU M. Risk field model of driving and its application in modeling car-following behavior[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 11605-11620. |
| [18] | BAO S, BOYLE L N. Age-related differences in visual scanning at median-divided highway intersections in rural areas[J]. Accident Analysis & Prevention, 2009, 41(1): 146-152. |
| [19] | AKAGI Y, RAKSINCHAROENSAK P. Stochastic driver speed control behavior modeling in urban intersections using risk potential-based motion planning framework[C].2015 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015: 368-373. |
| [20] | HAN Y, LI Q, QIAN Y, et al. Comparison of the landing kinematics of pedestrians and cyclists during ground impact determined from vehicle collision video records[J]. International Journal of Vehicle Safety, 2018, 10(3-4): 212-234. |
| [21] | 公安部. 道路交通信号控制系统术语: GB/T 31418—2015[S]. 2015. |
| Ministry of Public Security. Road traffic signal control system terminology: GB/T 31418—2015 [S]. 2015. | |
| [22] | 吴贺, 韩勇, 石亮亮,等. 基于视频信息的高精度事故重建方法研究[J]. 汽车工程, 2020, 42(6): 778-783,792. |
| WU H, HAN Y, SHI L, et al. Research on high-precision accident reconstruction method based on video information[J]. Automotive Engineering, 2020, 42(6): 778-783,792. | |
| [23] | 金钱钱, 韩勇, 黄红武,等. 基于视频信息的电动两轮车在不同碰撞场景下TTC研究[C].第22届中国汽车安全技术学术会议论文集. 保定: 中国汽车工程学会安全技术分会, 2019. |
| JIN Q, HAN Y, HUANG H, et al. TTC study of electric two-wheeled vehicles in different collision scenarios based on video information[C]. Proceedings of the 22nd China Automotive Safety Technology Conference. Baoding: Safety Technology Branch of China Society of Automotive Engineers, 2019. | |
| [24] | NGUYEN H H. Privacy-preserving mechanisms for k-modes clustering[J]. Computers & Security, 2018, 78: 60-75. |
| [25] | SAMMOUDA R, EL-ZAART A. An optimized approach for prostate image segmentation using K‐means clustering algorithm with elbow method[J]. Computational Intelligence and Neuroscience, 2021, 2021(1): 4553832. |
| [26] | UHM T, YI S. A comparison of normality testing methods by empirical power and distribution of P-values[J]. Communications in Statistics-Simulation and Computation, 2023, 52(9): 4445-4458. |
| [27] | HIGGINS J J. An introduction to modern nonparametric statistics[M]. Pacific Grove, CA: Brooks/Cole, 2004. |
| [28] | BERGER P D, MAURER R E, CELLI G B. Experimental design:with applications in management, engineering, and the sciences[M]. 2nd ed. Cham: Springer, 2018. |
| [29] | CONOVER W J. Practical nonparametric statistics[M]. John Wiley & Sons, 1999. |
| [30] | LEHMANN E L. Elements of large-sample theory[M]. New York, NY: Springer New York, 1999. |
| [31] | LI Y, LI K, ZHENG Y, et al. Threat assessment techniques in intelligent vehicles: a comparative survey[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 13(4): 71-91. |
| [32] | MULLAKKAL-BABU F A, WANG M, HE X, et al. Probabilistic field approach for motorway driving risk assessment[J]. Transportation Research Part C: Emerging Technologies, 2020, 118: 102716. |
| [33] | American Psychological Association. Publication manual of the American psychological association (2020)[J]. American Psychological Association, 2019, 428. |
| [34] | ANDERSON D R, WILLIAMS T A, COCHRAN J J. Statistics for business & economics[M]. Cengage Learning, 2020. |
|
||