Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (7): 1059-1068.doi: 10.19562/j.chinasae.qcgc.2022.07.012
Special Issue: 新能源汽车技术-电驱动&能量管理2022年
Previous Articles Next Articles
Xiaoyan Peng1,Xingfei Xing2,Qingjia Cui1,Jing Huang1( )
)
Received:2021-10-18
Revised:2022-02-28
Online:2022-07-25
Published:2022-07-20
Contact:
Jing Huang
E-mail:huangjing926@hnu.edu.cn
Xiaoyan Peng,Xingfei Xing,Qingjia Cui,Jing Huang. Research on Driving Force Distribution Control Method of Distributed Electric Vehicles[J].Automotive Engineering, 2022, 44(7): 1059-1068.

"
"

"

"
"
| 参数 | 数值 |
|---|---|
| 整车质量 | 1 500 |
| 车辆横摆转动惯量 | 1 536.7 |
| 质心距前轴的距离 | 1.015 |
| 质心距后轴的距离 | 1.895 |
| 轮距 | 1.916 |
| 前轴侧偏刚度 | 83 000 |
| 后轴侧偏刚度 | 70 000 |
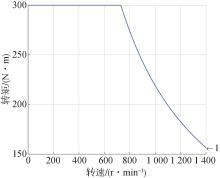
| 电机最大输出转矩 | 300 |
"
"

"
"

"

"

"

"
"

"


"
"
"
| 1 | 徐坤, 骆媛媛, 杨影,等. 分布式电驱动车辆状态感知与控制研究综述[J]. 机械工程学报, 2019,55 (22):60 -79. |
| XU Kun, LUO Yuanyuan, YANG Ying, et al. Review on state perception and control for distributed drive electric vehicles[J]. Journal of Mechanical Engineering, 2019,55 (22):60 -79. | |
| 2 | 冯冲, 丁能根, 何勇灵,等. 分布式驱动电动汽车底盘综合控制系统的设计[J]. 汽车工程, 2015, 37(2):207-213. |
| FENG Chong, DING Nenggen, HE Yongling, et al.Design of a comprehensive chassis control system for a distributed drive electric vehicle[J]. Automotive Engineering,2015, 37(2):207-213. | |
| 3 | XIN X S, ZHENG H G, XU H B, et al. Control strategy for four-wheel independent drive electric vehicles under failure of motor drive systems[J]. Transactions of the Institute of Measurement & Control, 2015:0142331215572040. |
| 4 | LI B Y, DU H P, LI W H. Fault-tolerant control of electric vehicles with in-wheel motors using actuator-grouping sliding mode controllers[J]. Mechanical Systems & Signal Processing, 2016, 72-73: 462-485. |
| 5 | YU Z P, LENG B, XIONG L, et al. Direct yaw moment control for distributed drive electric vehicle handling performance improvement[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3):486-497. |
| 6 | LI B Y, DU H P, LI W H, et al. Side-slip angle estimation based lateral dynamics control for omni-directional vehicles with optimal steering angle and traction/brake torque distribution[J]. Mechatronics, 2014, 30: 348-362. |
| 7 | REN B T, CHEN H, ZHAO H, et al. MPC-based yaw stability control in in-wheel-motored EV via active front steering and motor torque distribution[J]. Mechatronics, 2015, 38:103-114. |
| 8 | JING H, WANG R, CHADLI M, et al. Fault-tolerant control of four-wheel independently actuated electric vehicles with active steering systems[C]. 9th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes, Safeprocess 2015, At Paris, France. Elsevier Ltd, 2015. |
| 9 | 周洪亮, 贾凤娇, 刘志远,等.四轮独立驱动汽车驱动系统故障诊断与容错控制[J].机械工程学报, 2019, 55 (22):174-182. |
| ZHOU Hongliang, JIA Fengjiao, LIU Zhiyuan, et al. Fault diagnosis and fault-tolerant control method for in-wheel motor electric vehicles[J]. Journal of Mechanical Engineering, 2019, 55(22):174-182. | |
| 10 | LEE K, LEE M. Fault-tolerant stability control for independent four-wheel drive electric vehicle under actuator fault conditions[J]. IEEE Access, 2020, PP(99), DOI: 10.1109/ACCESS.2020.2994530. |
| 11 | LUO Y G, CAO K, XIE L Q, et al. Coordinated fault tolerant control of over-actuated electric vehicles based on optimal tyre force distribution[J]. International Journal of Vehicle Design, 2017, 75(1/2/3/4): 47-74. |
| 12 | LI C S, CHEN G, ZONG C F, et al. Fault-tolerant control for 4WID/4WIS electric vehicle based on EKF and SMC[J]. SAE International Journal of Passenger Cars - Electronic and Electrical Systems, 2015, 9(1):1-7. |
| 13 | WANG J M,WANG R R,JING H,et al. Coordinated active steering and four-wheel independently driving/braking control with control allocation[J]. Asian Journal of Control, 2016, 18(1):98-111. |
| 14 | WANG R R, WANG J M. Stability control of electric vehicles with four independently actuated wheels[C]. 2011 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, FL, USA: IEEE,2010,2511-2514. |
| 15 | 欧健, 胡经庆, 杨鄂川. 基于横摆力矩控制的电动汽车横向稳定性研究[J]. 机械设计与制造, 2016(4):182-185. |
| OU Jian,HU Jingqing,YANG Echuan, et al. Research on electric vehicle handling stability based on yaw moment control[J]. Machinery Design & Manufacture, 2016(4):182-185. | |
| 16 | MOUSAVINEJAD E, HAN Q L, YANG F W, et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics, 2017, 55(2):268-294. |
| 17 | TAVASOLI A, NARAGHI M, SHAKERI H. Optimized coordination of brakes and active steering for a 4WS passenger car[J]. ISA Transactions, 2012, 51(5):573-583. |
| 18 | 陈佳瑶, 彭晓燕. 线控制动车辆弯道制动力优化分配控制策略[J]. 机械设计, 2020, 37(2):1-9. |
| CHEN Jiayao, PENG Xiaoyan. Strategy for optimal braking-force allocation of vehicles with the brake-by-wire system during a braking-in-turn maneuver[J]. Journal of Machine Design, 2020, 37(2):1-9. | |
| 19 | 李春善.四轮独立线控电动汽车驱动系统主动容错控制策略研究[D].长春:吉林大学, 2018. |
| LI Chunshan. Research on active fault tolerant control strategy for electric drive system of X-by-wire electric vehicle with four wheels independent control[D]. Changchun: Jilin University, 2018. | |
| 20 | PELLEGRINO G, VAGATI A, GUGLIELMI P, et al. Performance comparison between surface-mounted and interior PM motor drives for electric vehicle application[J]. IEEE Transactions on Industrial Electronics, 2011, 59(2):803-811. |
| [1] | Yubo Lian,Bengang Yi,Yingying Cui,Hongsheng Tian,Junfei Yan,Chen Cheng. Research on Integrated Design of Battery Pack and Car Body Based on Torsional Stiffness [J]. Automotive Engineering, 2023, 45(4): 647-653. |
| [2] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [3] | Shengzhao Chen,Minyi Zheng,Qihui Ling,Zhewu Chen. An Investigation on the Characteristics of Hydraulically Interconnected Suspension System with Dual Accumulators [J]. Automotive Engineering, 2022, 44(2): 272-279. |
| [4] | Qi Hengmin, Zhang Nong, Wang Dong, Zhang Bangji, Zheng Minyi. Study on Dynamic Performance of a Bus Equipped with Electronically Controlled Air Spring and Hydraulically Interconnected Suspension [J]. Automotive Engineering, 2020, 42(3): 330-338. |
| [5] | Liu Kai, Chen Huiyan, Gong Jianwei, Chen Shuping, Zhang Yu. A Research on Handling Stability of High-speed Unmanned Vehicles [J]. Automotive Engineering, 2019, 41(5): 514-521. |
| [6] | Ke Jun, Shi Wenku, Yuan Ke. Study on Damping Characteristics of Composite Leaf Spring Based on Vehicle Performance [J]. Automotive Engineering, 2019, 41(12): 1424-1429. |