Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (2): 263-272.doi: 10.19562/j.chinasae.qcgc.2023.02.011
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2023年
Previous Articles Next Articles
Zhifei Wu( ),Shoubiao Li
),Shoubiao Li
Received:2022-07-20
Revised:2022-08-31
Online:2023-02-25
Published:2023-02-21
Contact:
Zhifei Wu
E-mail:wuzhifei@tyut.edu.cn
Zhifei Wu,Shoubiao Li. Lane Detection Algorithm Based on Instance Segmentation[J].Automotive Engineering, 2023, 45(2): 263-272.
"
"
| 层名 | 输出特征尺寸 | ResNet18 |
|---|---|---|
| L1 | 400×160×32 | 7×7卷积,步长2 |
| L2 | 200×80×64 | 3×3最大池化,步长2 |
| 残差模块×2 | ||
| L3 | 100×40×128 | 残差模块×2 |
| L4 | 50×20×256 | 残差模块×2 |
| L5 | 25×10×512 | 残差模块×2 |
"
"
"
"

"

"

"

"
"
| 数据集 | 总帧数 | 训练集 | 验证集 | 测试集 | 分辨率 |
|---|---|---|---|---|---|
| CULane | 133 325 | 88 880 | 9 675 | 34 680 | 1640×590 |
| TuSimple | 6 408 | 3 268 | 358 | 2 782 | 1280×720 |
"
| 场景 | SCNN | SAD | UFLD | E2Enet | 本文算法 |
|---|---|---|---|---|---|
| 正常/% | 90.6 | 90.1 | 90.7 | 91.0 | 91.1 |
| 拥挤/% | 69.7 | 68.8 | 70.2 | 73.1 | 72.6 |
| 夜晚/% | 66.1 | 66.0 | 66.7 | 67.9 | 70.5 |
| 无线/% | 43.4 | 41.6 | 44.4 | 46.6 | 50.2 |
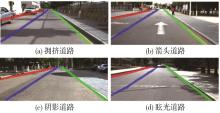
| 阴影/% | 66.9 | 65.9 | 69.3 | 74.1 | 75.8 |
| 箭头/% | 84.1 | 84.0 | 85.7 | 85.8 | 88.2 |
| 眩光/% | 58.5 | 60.2 | 59.5 | 64.5 | 67.1 |
| 弯道/% | 64.4 | 65.7 | 69.5 | 71.9 | 69.8 |
| 路口/个 | 1 990 | 1 998 | 2 037 | 2 022 | 1 923 |
| 综合/% | 71.6 | 70.8 | 72.3 | 74.0 | 75.2 |
"
"
| 方法 | F1 | 准确率 | 假阳率 | 假阴率 |
|---|---|---|---|---|
| SCNN | 96.0 | 96.5 | 6.2 | 1.8 |
| SAD | 95.9 | 96.6 | 6.0 | 2.1 |
| LaneNet | 94.8 | 96.4 | 7.8 | 2.4 |
| UFLD | 88.0 | 95.9 | 18.9 | 3.8 |
| E2ENet | 96.3 | 96.0 | 3.2 | 4.3 |
| PolyLaneNet | 90.6 | 93.4 | 9.4 | 9.3 |
| LSTR | 96.9 | 96.2 | 2.9 | 3.4 |
| 本文算法 | 97.0 | 96.1 | 2.5 | 3.2 |
"
| 方法 | 时间/ms | 速度/FPS |
|---|---|---|
| 模型推理 | 7.91 | 126.42 |
| DBSCAN聚类 | 7.23 | 138.31 |
| 综合 | 15.14 | 66.05 |
"
| 模型 | F1 | 精确率 | 召回率 |
|---|---|---|---|
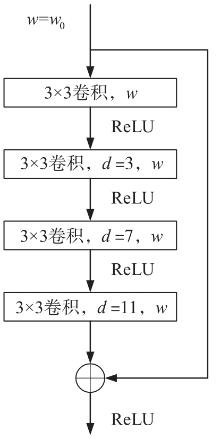
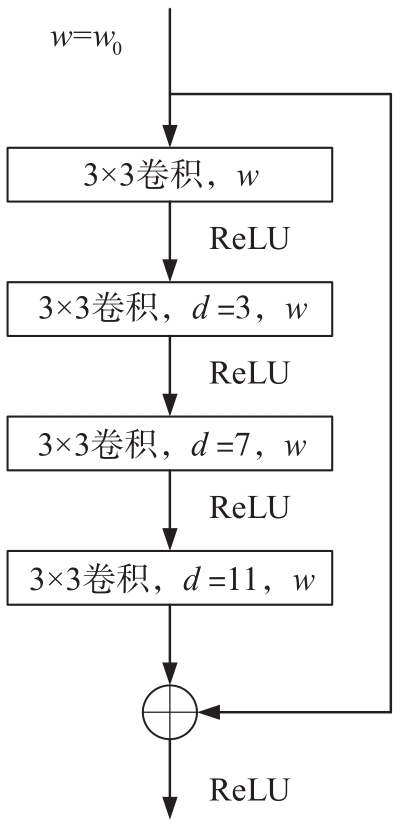
| 不加扩张卷积残差模块 | 74.4 | 77.7 | 71.4 |
| 加扩张卷积残差模块 | 75.2 | 78.0 | 72.6 |
"
| 实例分割方法 | F1 | 精确率 | 召回率 |
|---|---|---|---|
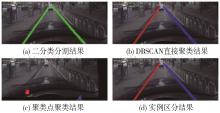
| 二分类分割+DBSCAN | 40.9 | 39.8 | 42.1 |
| 本文实例分割方法 | 75.2 | 78.0 | 72.6 |
"
"


"

"
| 1 | 吴一全, 刘莉. 基于视觉的车道线检测方法研究进展[J]. 仪器仪表学报, 2019, 40(12): 92-109. |
| WU Y Q, LIU L. Research and development of the vision-based lane detection methods[J]. Chinese Journal of Scientific Instrument, 2019, 40(12): 92-109. | |
| 2 | LIANG D, GUO Y C, ZHANG S K, et al. Lane detection: a survey with new results[J]. Journal of Computer Science and Technology, 2020, 35(3): 493-505. |
| 3 | SUN T Y, TSAI S J, CHAN V. HSI color model based lane-marking detection[C]. 2006 IEEE Intelligent Transportation Systems Conference. IEEE, 2006: 1168-1172. |
| 4 | 陈涛, 张洪丹, 陈东,等. 基于优先像素与卡尔曼滤波追踪的车道线检测[J]. 汽车工程, 2016, 38(2): 200-205,220. |
| CHEN T, ZHANG H D, CHEN D, et al. Lane detection based on high priority pixels and tracking by Kalman filter[J]. Automotive Engineering, 2016, 38(2): 200-205,220. | |
| 5 | 金智林, 何麟煊, 赵万忠. 用于智能汽车的复杂光照环境车道线检测及跟踪方法[J]. 汽车安全与节能学报, 2019, 10(4): 459-466. |
| JIN Z L, HE L X, ZHAO W Z. Detection and tracking method of lane line for intelligent vehicles under complex illumination condition[J]. Journal of Automotive Safety and Energy, 2019, 10(4): 459-466. | |
| 6 | 吴骅跃, 赵祥模. 基于IPM和边缘图像过滤的多干扰车道线检测[J]. 中国公路学报, 2020, 33(5): 153-164. |
| WU H Y, ZHAO X M. Multi-interference lane recognition based on IPM and edge image filtering[J]. China Journal of Highway and Transport, 2020, 33(5): 153-164. | |
| 7 | 张嘉明, 钱立军, 邱利宏, 等. 一种多线形车道线检测算法[J]. 合肥工业大学学报(自然科学版), 2020, 43(4): 536-542,570. |
| ZHANG J M, QIAN L J, QIU L H, et al. A multiple lane detection algorithm[J]. Journal of Hefei University of Technology(Natural Science), 2020, 43(4): 536-542,570. | |
| 8 | 陈无畏, 蒋玉亭, 谈东奎. 一种基于边缘点投影的车道线快速识别算法[J]. 汽车工程, 2017, 39(3): 357-363. |
| CHEN W W, JIANG Y T, TAN D K. A fast lane marking recognition algorithm based on edge projection[J]. Automotive Engineering, 2017, 39(3): 357-363. | |
| 9 | PAN X, SHI J, LUO P, et al. Spatial as deep: spatial CNN for traffic scene understanding[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2018: 7276-7283. |
| 10 | HOU Y, MA Z, LIU C, et al. Learning lightweight lane detection CNNs by self attention distillation[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 1013-1021. |
| 11 | NEVEN D, DE B B, GEORGOULIS S, et al. Towards end-to-end lane detection: an instance segmentation approach[C]. 2018 IEEE Intelligent Vehicles Symposium(IV). IEEE, 2018: 286-291. |
| 12 | QIN Z, WANG H, LI X. Ultra fast structure-aware deep lane detection[C]. Proceedings of European Conference on Computer Vision, 2020: 276-291. |
| 13 | YOO S, LEE H S, MYEONG H, et al. End-to-end lane marker detection via row-wise classification[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2020: 1006-1007. |
| 14 | TABELINI L, BERRIEL R, PAIXAO T M, et al. Polylanenet: lane estimation via deep polynomial regression[C]. Proceedings of the International Conference on Pattern Recognition. IEEE, 2021: 6150-6156. |
| 15 | LIU R, YUAN Z, LIU T, et al. End-to-end lane shape prediction with transformers[C]. Proceedings of the IEEE Winter Conference on Applications of Computer Vision, 2021: 3694-3702. |
| 16 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 17 | DENG J, DONG W, SOCHER R, et al. Imagenet: a large-scale hierarchical image database[C]. 2009 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2009: 248-255. |
| 18 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2117-2125. |
| 19 | YU F, KOLTUN V. Multi-scale context aggregation by dilated convolutions[C]. Proceedings of the 4th International Conference on Learning Representations. IEEE, 2016: 1-13. |
| 20 | WANG P, CHEN P, YUAN Y, et al. Understanding convolution for semantic segmentation[C]. 2018 IEEE Winter Conference on Applications of Computer Vision. IEEE, 2018:1451-1460. |
| 21 | BÄCKLUND H, HEDBLOM A, NEIJMAN N. A density-based spatial clustering of application with noise[J]. Data Mining TNM033, 2011: 11-30. |
| 22 | MISHRA P, SARAWADEKAR K. Polynomial learning rate policy with warm restart for deep neural network[C]. IEEE Region Ten Conference. IEEE, 2019: 2087-2092. |
| [1] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [2] | Junzhao Jiang,Wenhao Yang,Bin Peng,Ting Guo,Yekai Xu,Guozhuo Wang. Driving Range Prediction of Fuel Cell Vehicles Based on Energy Consumption Weighting Strategy [J]. Automotive Engineering, 2023, 45(12): 2357-2365. |
| [3] | Lisheng Jin,Yang He,Huanhuan Wang,Zhen Huo,Xianyi Xie,Baicang Guo. Point Cloud Segmentation Algorithm Based on Adaptive Threshold DBSCAN for Roadside LiDAR [J]. Automotive Engineering, 2022, 44(7): 987-996. |
| [4] | Zheyu Zhang,Lü Chao,Jinghang Li,Guangming Xiong,Shaobin Wu,Jianwei Gong. Pedestrian Trajectory Prediction and Risk Grade Assessment Based on Vehicle-Perspective Pedestrian Data [J]. Automotive Engineering, 2022, 44(5): 675-683. |
| [5] | Lei Ma,Zebin Liu,Biao Cao,Wenju Wang,Quanyuan Qiu. Roughness Measure-Based Road Drivable Region Identification [J]. Automotive Engineering, 2021, 43(11): 1594-1601. |
| [6] | Zhiguo Zhao,Peng Wang,Xiaorong Chen,Kaichong Liang. Obstacle Tracking of a Lidar-equipped Vehicle in Turning for Collision Avoidance [J]. Automotive Engineering, 2021, 43(11): 1611-1619. |
| [7] | Wen Sun,Juncai Rong,Junnian Wang,Jia Xu,Lü Siwen,Lili Liu. Research on the Construction Method of Urban Compound Driving Cycle with Curved Road Information [J]. Automotive Engineering, 2021, 43(10): 1519-1527. |
| [8] | Guo Jinghua, Li Keqiang, Wang Jin, Chen Tao, Li Wenchang, Wang Ban. Study on Prediction of Preceding Vehicle's Stochastic Motion Based on Risk Scenarios Clustering Analysis [J]. Automotive Engineering, 2020, 42(7): 847-853. |
| [9] | Gu Xianguang, Meng Kewei, Yao Xinxin, Wang Hongbo. Judging Method for Lateral Stability of Intelligent Vehicle Based on Combined Clustering [J]. Automotive Engineering, 2020, 42(11): 1497-1505. |
| [10] | Zhao Zhiguo, Feng Jianxiang, Zhou Liangjie, Wang Kai, Hu Haorui, Zhang Haishan, Ning Zhonglin. K-means++ Clustering and Recognition of Driver'sCollision Avoidance Steering Behavior [J]. Automotive Engineering, 2020, 42(1): 52-58. |
| [11] | Zhu Wangwang, Huang Hongcheng ,Ma Jinxing. A Research on Parking Space Detection Algorithm Based on Image Recognition [J]. Automotive Engineering, 2019, 41(7): 744-749. |
| [12] | Zhu Bing, Li Weinan, Wang Zhen, Zhao Jian, He Rui, Han Jiayi. Identification Strategy of Driving Style Based on Random Forest [J]. , 2019, 41(2): 213-218. |
| [13] | Fan Jingjing, Wang Li, Chu Wenbo, Luo Yugong. Research on Pedestrian Recognition in Cross-country Environment Based on KDTree and Euclidean Clustering [J]. Automotive Engineering, 2019, 41(12): 1410-1415. |
| [14] | Wang Bo, Tang Xianzhi, Wang Liandong, Yang Shujun & Ma Lei. Braking Intention Identification Method for Electric Vehicles Based on EEMD and Entropy Theory [J]. , 2018, 40(8): 935-941. |
| [15] | Ma Lei, Chen Ke, Wang Minglu, Qu Rui. A Study on Driver Behavior Identification Method Under Environment of Vehicle-Road Integration [J]. , 2018, 40(11): 1330-1338. |