Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (3): 383-395.doi: 10.19562/j.chinasae.qcgc.2024.03.002
Xiaojian Wu1,2( ),Pingwei Liao1,4,Yao Lei2,Huihua Jiang2,Aichun Wang2,Jiaqi Hu3
),Pingwei Liao1,4,Yao Lei2,Huihua Jiang2,Aichun Wang2,Jiaqi Hu3
Received:2023-07-09
Revised:2023-09-08
Online:2024-03-25
Published:2024-03-18
Contact:
Xiaojian Wu
E-mail:saintwu520@163.com
Xiaojian Wu,Pingwei Liao,Yao Lei,Huihua Jiang,Aichun Wang,Jiaqi Hu. Research on Consistency of Intelligent Driving Trajectory Planning for Structured Road[J].Automotive Engineering, 2024, 46(3): 383-395.

"
"
"
"

"
"
"
"

"
"
| 变量符号/单位 | 变量名称 | 数值 | ||||||
|---|---|---|---|---|---|---|---|---|
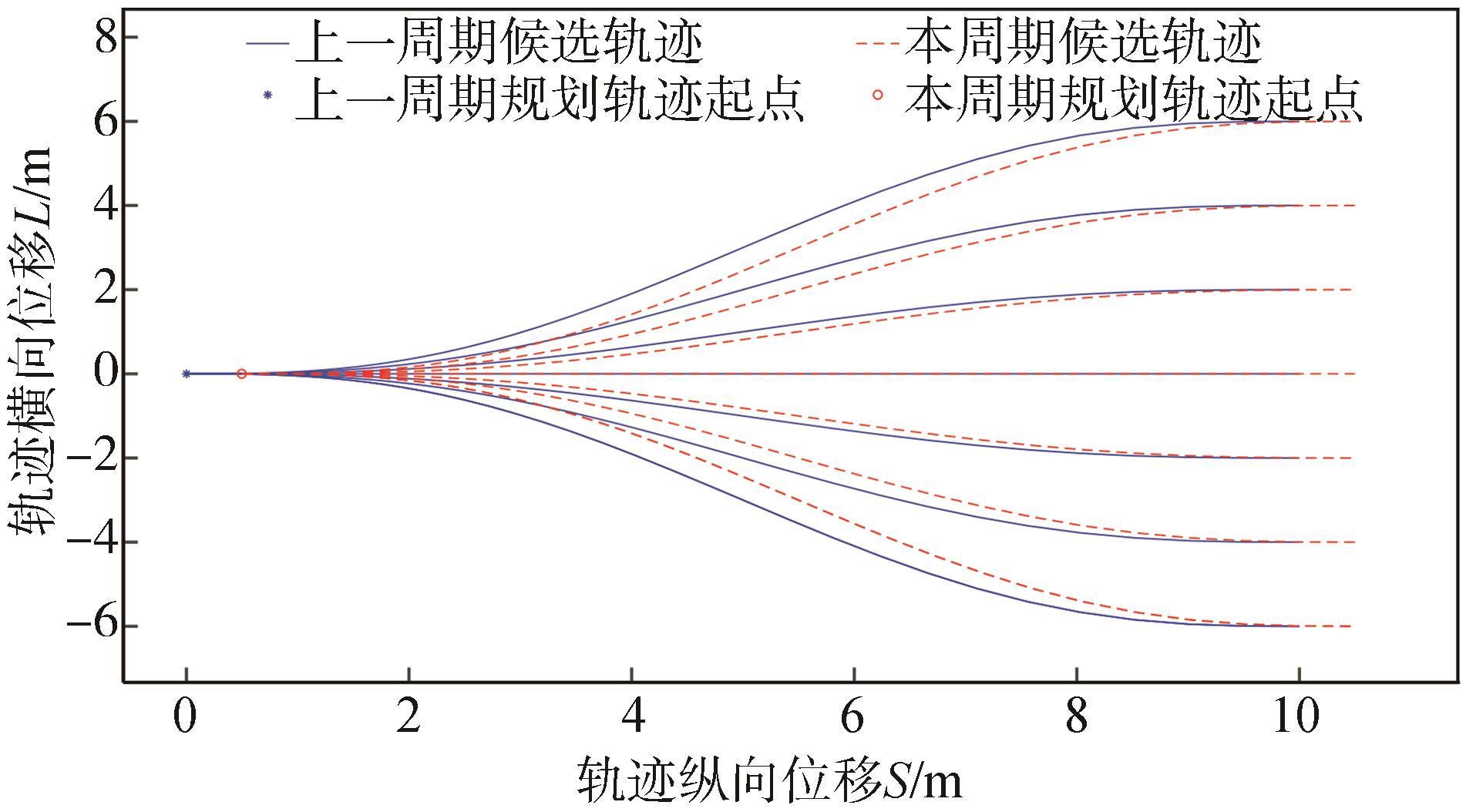
| i | 轨迹Ri 序列值 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Dend_now/m | 候选轨迹末状态 横向位移 | -6 | -4 | -2 | 0 | 2 | 4 | 6 |
| Pcon | 轨迹一致性真值 | 0 | 0 | 0 | 1 | 1 | 1 | 0 |
"
| 变量符号/单位 | 变量名称 | 数值 |
|---|---|---|
| rego/m | 车辆碰撞半径 | 1.2 |
| rob/m | 障碍物碰撞半径 | 1.2/1.5 |
| lw/m | 道路宽度 | 3.75 |
| Δl/m | 横向道路宽度采样间隔 | 0.468 8 |
| amax/(m·s-2) | 最大加速度 | 5 |
| kappamax/m-1 | 最大曲率 | 0.5 |
| Ttotal/s | 轨迹时长 | 4 |
| ΔT/s | 轨迹点时间离散间隔 | 0.1 |
| Tplanning/s | 轨迹规划周期 | 0.5 |
| Nv_target | 目标纵向速度采样数量 | 1 |
| Tprediction/s | 障碍物预测轨迹时长 | 6 |

"
"
"

"

"
"

"
"

"

"
"
"
"
"

"

"

"
"

"
"
"
| 1 | KALA R, WARWICK K. Multi-level planning for semi-autonomous vehicles in traffic scenarios based on separation maximization[J]. Journal of Intelligent & Robotic Systems, 2013, 72(3): 559-590. |
| 2 | 封硕,吉现友,程博,等.融合动态障碍物运动信息的路径规划算法[J].计算机工程与应用, 2022,58(21):279-285. |
| FENG S, JI X Y, CHEN B, et al. Path planning algorithm based on dynamic obstacle movement information[J]. Computer Engineering and Application, 2022, 58(21): 279-285. | |
| 3 | MCNAUGHT M, URMSON C, DOLAN J M, et al. Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]. 2011 IEEE International Conference on Robotics and Automation. IEEE, 2011: 4889-4895. |
| 4 | LAVALLE S M, KUFFNER J J J. Randomized kinodynamic motion planning[J]. The International Journal of Robotics Research, 2001, 20(5): 378-400. |
| 5 | KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 6 | 江洪,蒋潇杰.基于RRT改进的路径规划算法[J].重庆理工大学学报(自然科学),2021,35(7):10-16,124. |
| JIANG H, JIANG X J. Improved path planning algorithm based on RRT[J]. Journal of Chongqing University of Technology (Natural Science), 2021, 35(7):10-16,124. | |
| 7 | GUO H Y, SHEN C, ZHANG H, et al. Simultaneous trajectory planning and tracking using an MPC method for cyber-physical systems: a case study of obstacle avoidance for an intelligent vehicle[J].IEEE Transactions on Industrial Informatics,2018,14(9): 4273-4283. |
| 8 | LI C, LI X Y, LI J X, et al. Trajectory planning for autonomous ground vehicles driving in structured environments[C]. 2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). IEEE, 2017, 2: 41-46. |
| 9 | 郄天琪,王伟达,杨超,等. 基于模型预测控制方法的智能车路径规划策略研究[C]. 2021中国汽车工程学会年会论文集,2021:119-123. |
| QIE T Q, WANG W D, YANG C, et al. A path planning method for intelligent vehicles based on model predictive control method[C]. SAECCE-ICV061,2021:119-123. | |
| 10 | PETROV P, NASHASHIBI F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1643-1656. |
| 11 | LI X H, SUN Z P, CAO D P, et al. Real-time trajectory planning for autonomous urban driving: Framework, algorithms, and verifications[J]. IEEE/ASME Transactions on Mechatronics, 2015, 21(2): 740-753. |
| 12 | 高嵩,张金炜,戎辉,等.基于贝塞尔曲线的无人车局部避障应用[J].现代电子技术,2019, 42(9):163-166. |
| GAO S, ZHANG J W, RONG H, et al. Application of unmanned vehicle local obstacle avoidance method based on Bezier curve[J]. Modern Electronics Technique, 2019, 42(9):163-166. | |
| 13 | GONZALEZ D, PEREZ J, MILANES V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1135-1145. |
| 14 | 姜岩,王琦,龚建伟,等.无人驾驶车辆局部路径规划的时间一致性与鲁棒性研究[J].自动化学报,2015,41(3):518- 527. |
| JIANG Y, WANG Q, GONG J W, et al. Research on temporal consistency and robustness in local planning of intelligent vehicles[J]. Acta Automatica Sinica, 2015, 41(3):518- 527. | |
| 15 | WERLING M, ZIEGLER J, KAMMEL S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenet frame[C]. 2010 IEEE International Conference on Robotics and Automation. IEEE, 2010: 987-993. |
| 16 | 田晓生. 智能车局部路径规划及路径跟踪方法研究[D].北京: 北京工业大学,2018. |
| TIAN X S. The research of local path planning and path tracking method for intelligent vehicle[D]. Beijing: Beijing University of Technology,2018. | |
| 17 | LI X H, SUN Z P, CAO D P, et al. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87:118-137. |
| 18 | 张志勇,邱国梁,黄彩霞,等.基于改进人工势场的自动驾驶汽车弯道超车动态路径规划[J].中国公路学报,2022, 35(12):268-278. |
| ZHANG Z Y, QIU G L, HUANG C X, et al. Dynamic path planning for self-driving cars overtaking on curves based on improved artificial potential field[J]. China Journal of Highway and Transport, 2022, 35(12): 268-278. | |
| 19 | 彭晓燕,谢浩,黄晶.无人驾驶汽车局部路径规划算法研究[J].汽车工程,2020,42(1):1-10. |
| PENG X Y, XIE H, HUANG J. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering,2020,42(1):1-10. | |
| 20 | HU X M, CHEN L, TANG B, et al. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles[J]. Mechanical Systems and Signal Processing, 2018, 100: 482-500. |
| 21 | 魏民祥,滕德成,吴树凡.基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J].控制与决策,2021,36 (4):815-824. |
| WEI M X, TENG D C, WU S F. Trajectory planning and optimization algorithm for automated driving based on Frenet coordinate system[J]. Control and Decision, 2021,36 (4):815-824. | |
| 22 | 龚建伟. 无人驾驶车辆模型预测控制[M]. 北京:北京理工大学出版社有限责任公司, 2020. |
| GONG J W. Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press,2020. |
| [1] | Hongmao Qin,Guoli Shen,Yunshui Zhou,Shengjie Huang,Xiaohui Qin,Guotao Xie,Rongjun Ding. Tag-Based Vehicle Visual SLAM in Sparse Feature Scenes [J]. Automotive Engineering, 2023, 45(9): 1543-1552. |
| [2] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [3] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [4] | Dandan Hu,Pengfei Yin,Guochen Niu,Jinju Zhao. Research on Active Obstacle Avoidance Control of Off-axis Trailing Vehicle on Unstructured Road [J]. Automotive Engineering, 2023, 45(12): 2318-2329. |
| [5] | Jiangkun Li,Weiwen Deng,Bingtao Ren,Wenqi Wang,Juan Ding. Automatic Driving Edge Scene Generation Method Based on Scene Dynamics and Reinforcement Learning [J]. Automotive Engineering, 2022, 44(7): 976-986. |
| [6] | Bin Tang,Zhanxiang Xu,Haobin Jiang,Yingfeng Cai,Zitian Hu,Zhengyi Yang. Trajectory Planning of Intelligent Vehicles in Lane Change for Collision Avoidance Based on Segmented Optimization [J]. Automotive Engineering, 2022, 44(6): 831-841. |
| [7] | Bin Yang,Xuewei Song,Zhenhai Gao. Optimal Obstacle Avoidance Trajectory Planning Algorithm Considering Vehicle Motion Constraints [J]. Automotive Engineering, 2021, 43(4): 562-570. |
| [8] | Jinghua Guo,Wenchang Li,Yugong Luo,Tao Chen,Keqiang Li. Driver Car⁃Following Model Based on Deep Reinforcement Learning [J]. Automotive Engineering, 2021, 43(4): 571-579. |
| [9] | Hu Zhaohui, Huang Shunxia, Du Zhanpeng, Guo Xing, Gao Hexuan. Active Obstacle Avoidance Algorithm Based on Lateral Safety Distance Model [J]. Automotive Engineering, 2020, 42(5): 581-587. |
| [10] | Liu Zhiqiang, Han Jingwen, Ni Jie. Study on Multi-vehicle Coordinated Lane Change Strategy Under Network Conditions [J]. Automotive Engineering, 2020, 42(3): 299-306. |
| [11] | Peng Xiaoyan, Xie Hao, Huang Jing. Research on Local Path Planning Algorithm for Unmanned Vehicles [J]. Automotive Engineering, 2020, 42(1): 1-10. |
| [12] | Li Yayong, Cai Yingfeng, Chen Long, Sun Xiaoqiang, He Youguo, Zhang Yunshun. ACC Method Considering Driving State of Front and Rear Vehicles [J]. Automotive Engineering, 2019, 41(8): 865-871. |
| [13] | Hu Yanping, Tian Bo, Chen Wuwei, Zhang Ruichen. Obstacle Avoidance Trajectory Planning for Intelligent VehicleBased on Derived State Lattice from Obstacle [J]. Automotive Engineering, 2019, 41(8): 967-974. |
| [14] | Wang Qidong, Li Yinxiang, Chen Wuwei, Zhao Linfeng , Xie Youhao. A Research on Emergency Obstacle Avoidance of Intelligent Vehicle Based on Braking and Steering Coordinated Control [J]. Automotive Engineering, 2019, 41(4): 395-403. |
| [15] | Zhang Jinhui, Li Keqiang, Luo Yugong, Zhang Shuwei & Li Hong. Prediction of Preceding Car Motion Under Car-following Scenario in the Internet of Vehicle Based on Bayesian Network [J]. , 2019, 41(3): 245-251. |
|
||