Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (5): 675-683.doi: 10.19562/j.chinasae.qcgc.2022.05.004
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
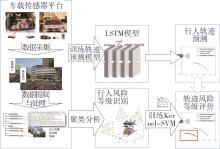
Zheyu Zhang,Lü Chao( ),Jinghang Li,Guangming Xiong,Shaobin Wu,Jianwei Gong
),Jinghang Li,Guangming Xiong,Shaobin Wu,Jianwei Gong
Received:2021-11-02
Revised:2021-12-15
Online:2022-05-25
Published:2022-05-27
Contact:
Lü Chao
E-mail:chaolu@bit.edu.cn
Zheyu Zhang,Lü Chao,Jinghang Li,Guangming Xiong,Shaobin Wu,Jianwei Gong. Pedestrian Trajectory Prediction and Risk Grade Assessment Based on Vehicle-Perspective Pedestrian Data[J].Automotive Engineering, 2022, 44(5): 675-683.
"

"

"

"
| 模型 | 输入 | 输出 |
|---|---|---|
| 位置 | 位置 | |
| 标注框 | 位置 | |
| 距离(行人到车辆) | 位置 | |
| 标注框 + 距离 | 位置 |
"
| 地点 | 样本数 | ||||
|---|---|---|---|---|---|
| 校园 | 32 | 0.22 | 0.70 | 2.52 | 0.31 |
| 魏公村 | 46 | 0.18 | 1.41 | 2.06 | 0.68 |
| 模型平均误差/m | 0.26 | 0.96 | 2.87 | 0.45 | |
"

"


"

"
| 核类别 | 校园数据集 | 城区数据集 | ||
|---|---|---|---|---|
| 分类准确率 / % | 分类速度 / s-1 | 分类准确率 / % | 分类速度/ s-1 | |
| 线性核 | 95.3 | ~6 900 | 97.7 | ~5 500 |
| 二次核 | 98.2 | ~8 000 | 97.9 | ~7 000 |
| 立方核 | 95.7 | ~5 000 | 98.6 | ~7 900 |
| 高斯核 | 96.5 | ~7 700 | 98.8 | ~8 500 |

"

"
| 1 | RASOULI A, TSOTSOS J K. Autonomous vehicles that interact with pedestrians: a survey of theory and practice [J]. IEEE Transactions on Intelligent Transportation Systems, 2019. |
| 2 | GUO J, KURUP U, SHAH M. Is it safe to drive? an overview of factors, metrics, and datasets for driveability assessment in autonomous driving [J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(8): 3135-3151. |
| 3 | MAURYA S K, CHOUDHARY A. Pedestrian detection and vulnerability decision in videos [C]. 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP). IEEE: 1-6. |
| 4 | CAMARA F, BELLOTTO N, COSAR S, et al. Pedestrian models for autonomous driving part II: high-level models of human behavior [J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 5 | RUDENKO A, PALMIERI L, HERMAN M, et al. Human motion trajectory prediction: a survey [J]. The International Journal of Robotics Research, 2020, 39(8): 895-935. |
| 6 | CHEN Z, WU C, LYU N, et al. Pedestrian-vehicular collision avoidance based on vision system [C]. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE: 11-15. |
| 7 | RIDEL D A, DEO N, WOLF D, et al. Understanding pedestrian-vehicle interactions with vehicle mounted vision: an LSTM model and empirical analysis [C]. 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE: 913-918. |
| 8 | KOOIJ J F P, SCHNEIDER N, FLOHR F, et al. Context-based pedestrian path prediction [C]. European Conference on Computer Vision. Springer: 618-633. |
| 9 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social lstm: human trajectory prediction in crowded spaces [C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 961-971. |
| 10 | MA Y, ZHU X, ZHANG S, et al. Trafficpredict: trajectory prediction for heterogeneous traffic-agents [C]. Proceedings of the AAAI Conference on Artificial Intelligence.33: 6120-6127. |
| 11 | QUINTERO R, PARRA I, LLORCA D F, et al. Pedestrian intention and pose prediction through dynamical models and behaviour classification [C]. 2015 IEEE 18th International Conference on Intelligent Transportation Systems. IEEE: 83-88. |
| 12 | ROTH M, FLOHR F, GAVRILA D M. Driver and pedestrian awareness-based collision risk analysis [C]. 2016 IEEE Intelligent Vehicles Symposium (IV). IEEE: 454-459. |
| 13 | LEFèVRE S, VASQUEZ D, LAUGIER C. A survey on motion prediction and risk assessment for intelligent vehicles [J]. ROBOMECH journal, 2014, 1(1): 1-14. |
| 14 | CHEN P, ZENG W, YU G, et al. Assessing right-turning vehicle-pedestrian conflicts at intersections using an integrated microscopic simulation model [J]. Accident Analysis, 2019, 129211-224. |
| 15 | FLORES C, MERDRIGNAC P, DE CHARETTE R, et al. A cooperative car-following/emergency braking system with prediction-based pedestrian avoidance capabilities [J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(5): 1837-1846. |
| 16 | MCGILL S G, ROSMAN G, ORT T, et al. Probabilistic risk metrics for navigating occluded intersections [J]. IEEE Robotics Automation Letters, 2019, 4(4): 4322-4329. |
| 17 | BAO N, CARBALLO A, MIYAJIMA C, et al. Personalized subjective driving risk: analysis and prediction [J]. Journal of Robotics, 2020, 32(3): 503-519. |
| 18 | GAO H, ZHU J, ZHANG T, et al. Situational assessment for intelligent vehicles based on Stochastic model and Gaussian distributions in typical traffic scenarios [J]. IEEE Transactions on Systems, Man, Cybernetics: Systems, 2020. |
| 19 | FENG J, WANG C, XU C, et al. Active collision avoidance strategy considering motion uncertainty of the pedestrian [J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 20 | KIM J, KUM D. Collision risk assessment algorithm via lane-based probabilistic motion prediction of surrounding vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(9): 2965-2976. |
| 21 | CAI Y, DAI L, WANG H, et al. Pedestrian motion trajectory prediction in intelligent driving from far shot first-person perspective video [J]. IEEE Transactions on Intelligent Transportation Systems, 2021. |
| 22 | YAGI T, MANGALAM K, YONETANI R, et al. Future person localization in first-person videos [C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2018: 7593-7602. |
| 23 | SONG X, CHEN K, LI X, et al. Pedestrian trajectory prediction based on deep convolutional lstm network [J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 24 | XUE H, HUYNH D Q, REYNOLDS M. SS-LSTM: a hierarchical LSTM model for pedestrian trajectory prediction [C]. 2018 IEEE Winter Conference on Applications of Computer Vision (WACV). IEEE: 1186-1194. |
| 25 | GUTIERREZ-OSORIO C, PEDRAZA C. Modern data sources and techniques for analysis and forecast of road accidents: a review [J]. Journal of Traffic Transportation Engineering, 2020. |
| 26 | LYU N, DUAN Z, MA C, et al. Safety margins–a novel approach from risk homeostasis theory for evaluating the impact of advanced driver assistance systems on driving behavior in near-crash events [J]. Journal of Intelligent Transportation Systems, 2021, 25(1): 93-106. |
| 27 | WANG X, XU X, PREVENTION. Assessing the relationship between self-reported driving behaviors and driver risk using a naturalistic driving study [J]. Accident Analysis, 2019, 128(8-16). |
| 28 | LI Z, WANG B, GONG J, et al. Development and evaluation of two learning-based personalized driver models for pure pursuit path-tracking behaviors [C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE: 79-84. |
| 29 | CLEVELAND W S. Robust locally weighted regression and smoothing scatterplots [J]. Journal of the American statistical association, 1979, 74(368): 829-836. |
| 30 | ANAYA J J, MERDRIGNAC P, SHAGDAR O, et al. Vehicle to pedestrian communications for protection of vulnerable road users [C]. 2014 IEEE Intelligent Vehicles Symposium Proceedings. IEEE: 1037-1042. |
| 31 | LI Y, ZHANG L, SONG Y. A vehicular collision warning algorithm based on the time-to-collision estimation under connected environment [C]. 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV). IEEE: 1-4. |
| 32 | MULLER K R, MIKA S, RATSCH G, et al. An introduction to kernel-based learning algorithms [J]. IEEE Transactions on Neural Networks, 2001, 12(2): 181-201. |
| 33 | LIKAS A, VLASSIS N, VERBEEK J J. The global k-means clustering algorithm [J]. Pattern Recognition, 2003, 36(2): 451-461. |
| 34 | LI J, LU C, XU Y, et al. Manifold Learning for Lane-changing behavior recognition in urban traffic [C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). IEEE: 3663-3668. |
| 35 | TOMAR R S, VERMA S, TOMAR G S. SVM based trajectory predictions of lane changing vehicles [C]. 2011 International Conference on Computational Intelligence and Communication Networks. IEEE: 716-721. |
| [1] | Yong Han,Xujie Lin,Hongwu Huang,Hongyu Cai,Jinrong Luo,Yangting Li. An Approach for Predicting Pedestrian Trajectories in Typical Car Crash Scenarios [J]. Automotive Engineering, 2023, 45(6): 1022-1030. |
| [2] | Sun Daoming, Yu Xiaoli. Capacity Prediction Method of Lithium-ion Battery Under Random Discharge Condition [J]. Automotive Engineering, 2020, 42(9): 1189-1196. |
| [3] | Bao Wei, Ge Jianjun. Study on Battery SOC Prediction Method for Electric Bus Based on Sparsely Sampled Data [J]. Automotive Engineering, 2020, 42(3): 367-374. |
| [4] | Wang Yan, Liang Guanqun, Wei Yintao. Road Identification Algorithm of Intelligent Tire Based on Support Vector Machine [J]. Automotive Engineering, 2020, 42(12): 1671-1678. |
| [5] | Liu Xingtao, Li Kun, Wu Ji, He Yao, Liu Xintian. State of Charge Estimation for Traction Battery Based on EKF-SVM Algorithm [J]. Automotive Engineering, 2020, 42(11): 1522-1528. |
| [6] | Liu Zhiqiang, Wu Xuegang, Ni Jie & Zhang Teng. Driving Intention Recognition Based on HMM and SVM Cascade Algorithm [J]. , 2018, 40(7): 858-. |