Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (6): 877-884.doi: 10.19562/j.chinasae.qcgc.2021.06.011
Previous Articles Next Articles
Caixia Li1,Shaobo Lu1,2( ),Bohan Zhang1,Wenjuan Wu1,Jiafeng Lu1
),Bohan Zhang1,Wenjuan Wu1,Jiafeng Lu1
Received:2020-10-30
Revised:2021-01-23
Online:2021-06-25
Published:2021-06-29
Contact:
Shaobo Lu
E-mail:lsb@cqu.edu.cn
Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction[J].Automotive Engineering, 2021, 43(6): 877-884.
"
"
"


"
"
"
"
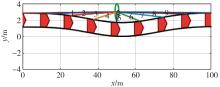
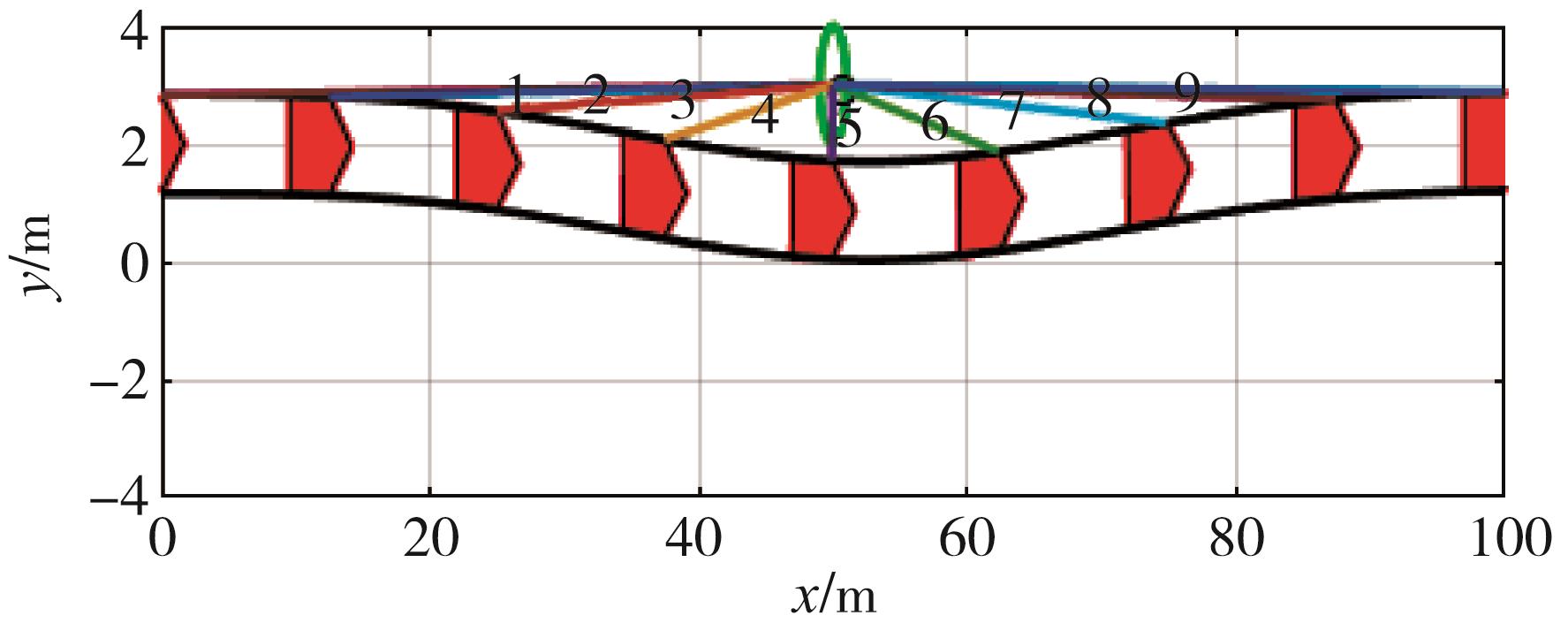
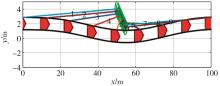
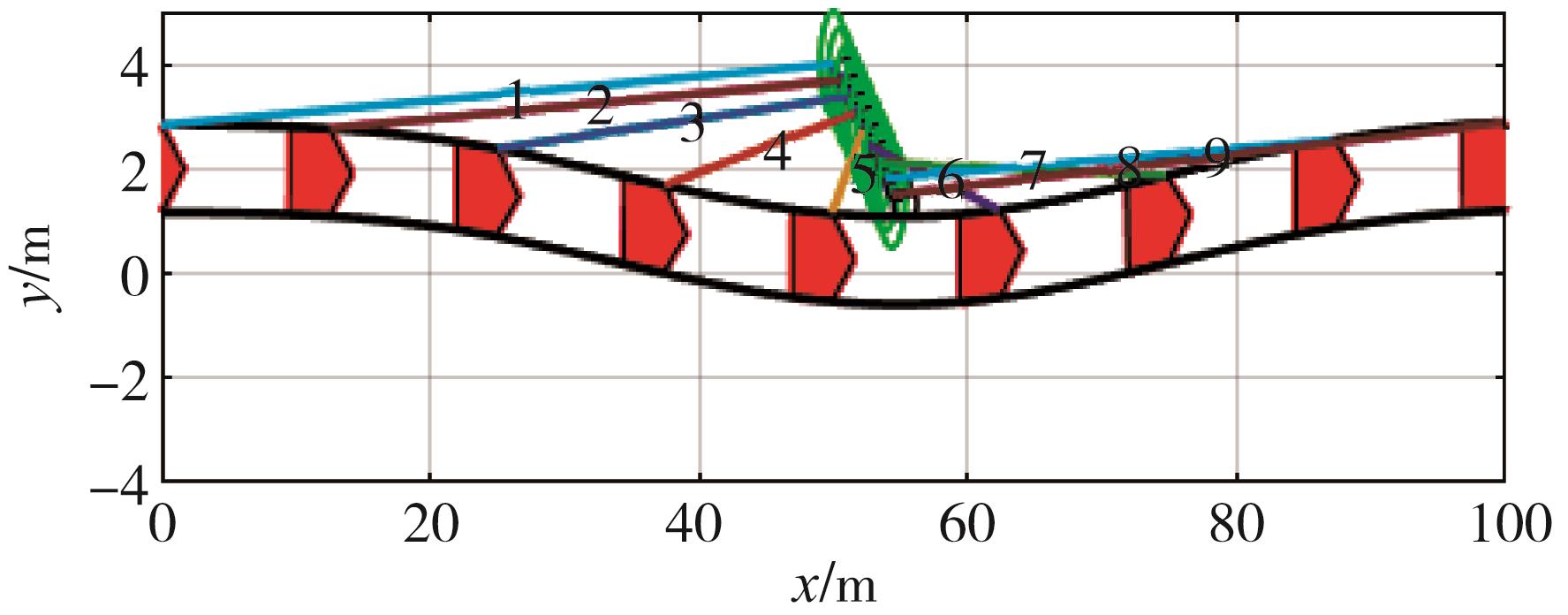
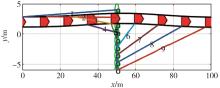
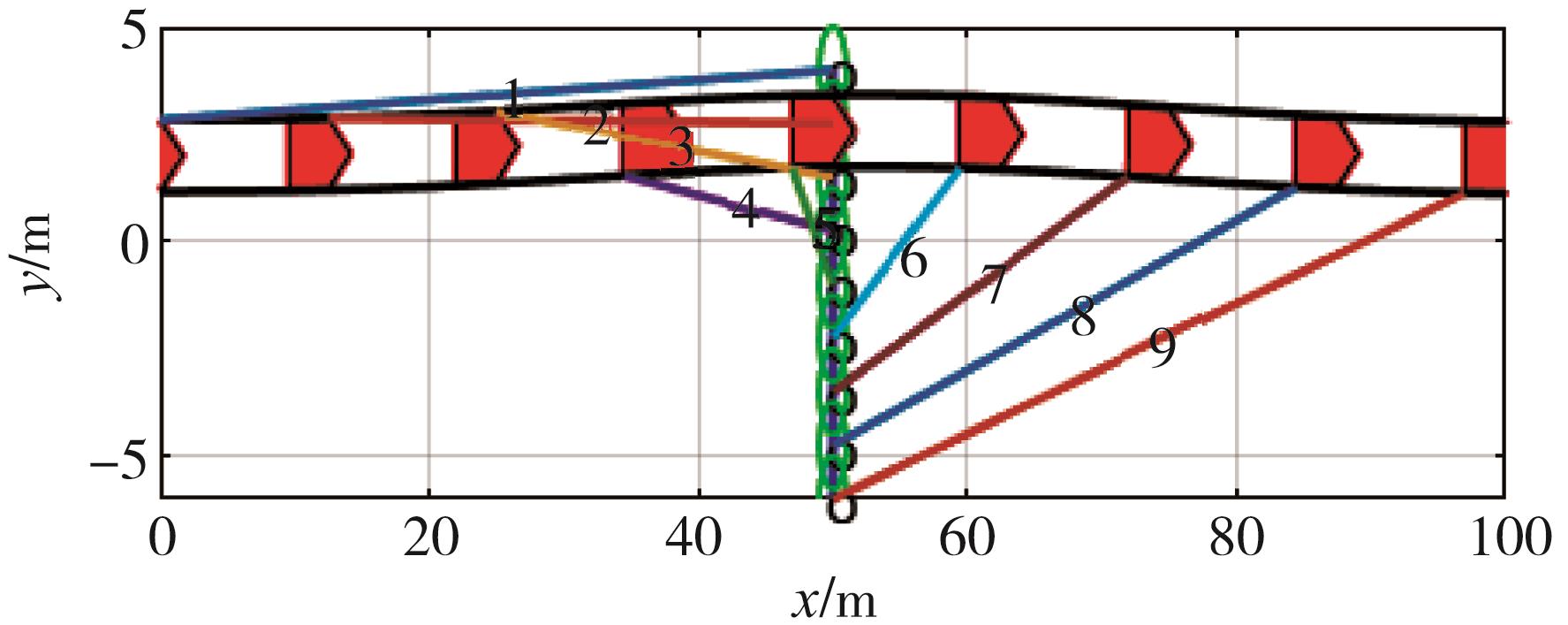
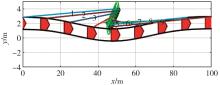
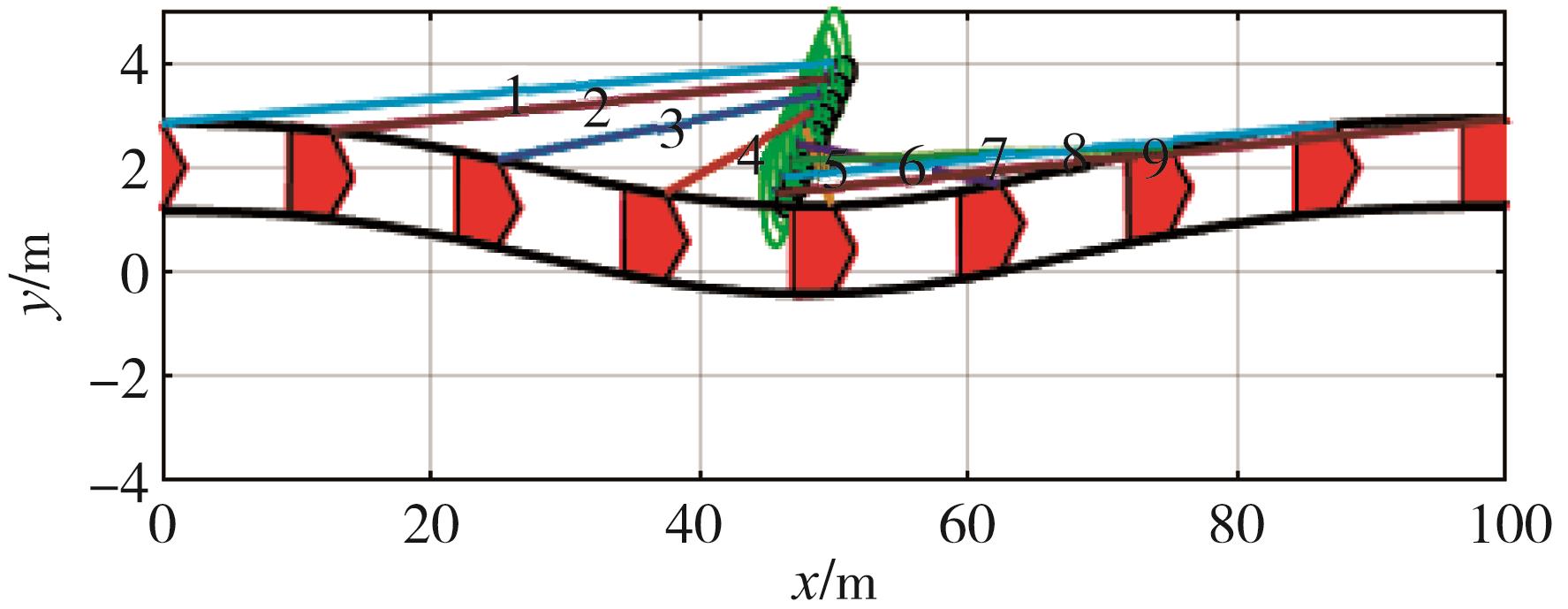
| 参数 | 场景1 | 场景2 | 场景3 | 场景4 |
|---|---|---|---|---|
| vp/(m·s-1) | 0 | 1.25 | 1.25 | 1.25 |
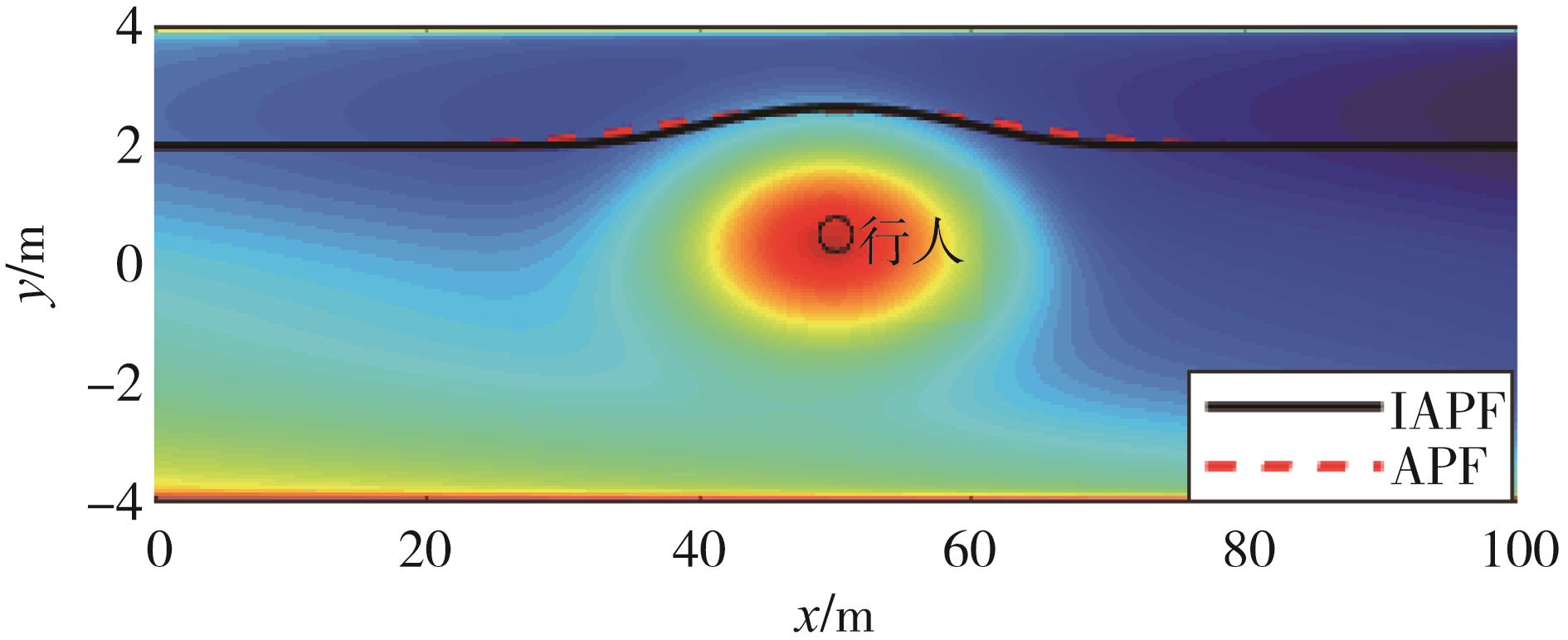
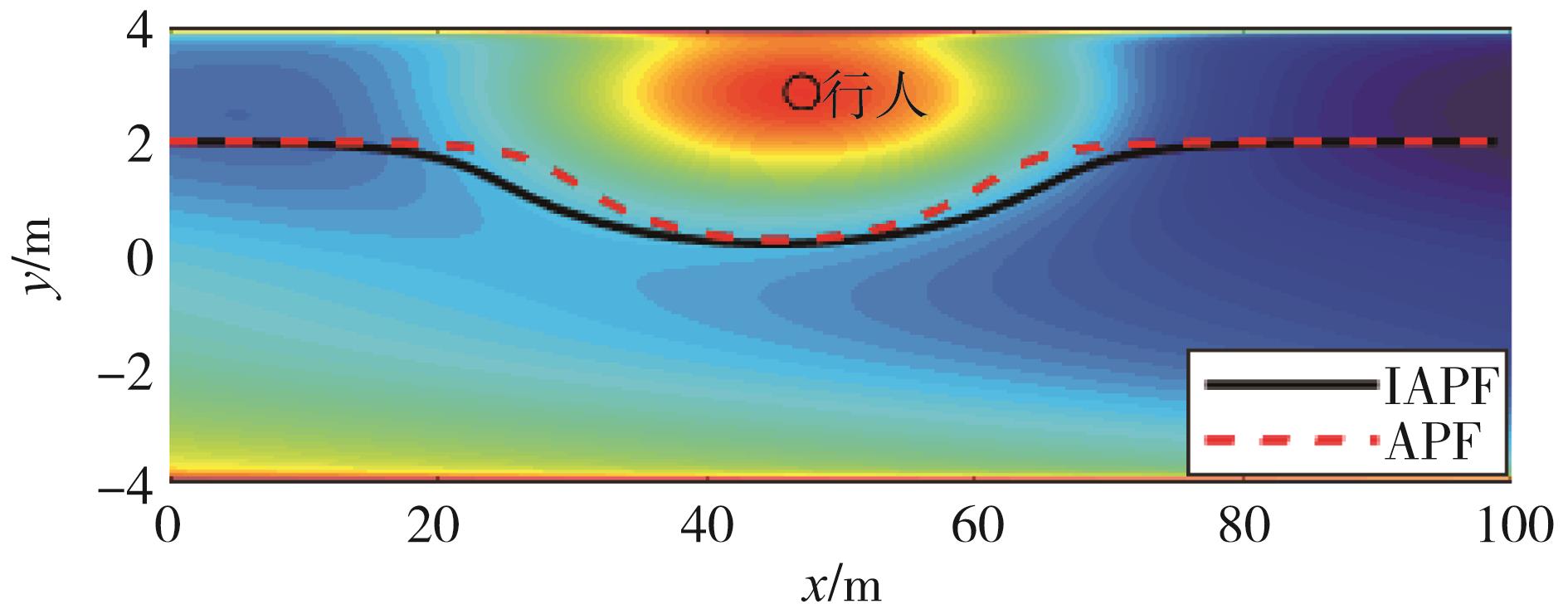
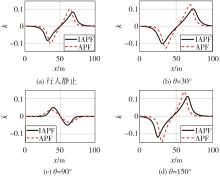
| θ/(°) | 静止 | 30 | 90 | 150 |
| vc/(m·s-1) | 25 | 25 | 25 | 25 |
| xp(0)/m | 50 | 50 | 50 | 50 |
| yp(0)/m | 3 | 4 | 3 | 4 |
| Tcp/s | 2 | 2.09 | 2 | 1.92 |
| t=Tcp时,xp(t)/m | 50 | 50.26 | 50 | 47.92 |
| t=Tcp时,yp(t)/m | 3 | 2.69 | 0.5 | 2.8 |
"


"

"
"
"
| 项目 | 场景1 | 场景2 | 场景3 | 场景4 |
|---|---|---|---|---|
| 固定长半轴/m | 15 | |||
| 可变长半轴/m | 18.78 | 22.02 | 11.85 | 22.02 |
"

"
"
"
"
| 1 | 吴文静, 陈润超, 马芳武, 等. 基于序列比对的行人过街风险识别研究[J]. 交通运输系统工程与信息, 2018, 18(3): 101-107. |
| WU W J, CHEN R C, MA F W, et al. Identify risks of pedestrian crossing based on sequence alignment method[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(3): 101-107. | |
| 2 | 朱西产, 刘智超, 李霖. 基于车辆与行人危险工况的转向避撞控制策略[J]. 汽车安全与节能学报, 2015, 6(3): 217-223. |
| ZHU X C, LIU Z C, LI L. Evasive manoeuvre for emergency steering based on typical vehicle⁃pedestrian use case[J]. Journal of Automotive Safety & Energy, 2015, 6(3): 217-223. | |
| 3 | 彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1): 1-10. |
| PENG X Y, XIE H, HUANG J. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering, 2020, 42(1): 1-10. | |
| 4 | KHATIB O. Real⁃time obstacle avoidance for manipulators and mobilerobots[J]. International Journal of Robotics Research, 1986, 5(1): 90-98. |
| 5 | 王洪斌, 郝策, 张平, 等. 基于A*算法和人工势场法的移动机器人路径规划[J]. 中国机械工程, 2019, 30(20): 2489-2496. |
| WANG H B, HAO C, ZHANG P, et al. Path planning of mobile robot based on A* algorithm and artificial potential field method[J]. China Mechanical Engineering, 2019, 30(20): 2489-2496. | |
| 6 | 任玥, 郑玲, 张巍, 等. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4): 404-410. |
| REN Y, ZHENG L, ZHANG W, et al. A study on active collision avoidance control of autonomous vehicles based on model predictive control[J]. Automotive Engineering, 2019, 41(4): 404-410. | |
| 7 | 徐杨, 陆丽萍, 褚端峰, 等. 无人车辆轨迹规划与跟踪控制的统一建模方法[J]. 自动化学报, 2019, 45(4): 799-807. |
| XU Y, LU L P, CHU D F, et al. Unified modeling of trajectory planning and tracking for unmanned vehicle[J]. ACTA Automatica Sinica, 2019, 45(4): 799-807. | |
| 8 | HU H, ZHANG C, SHENG Y, et al. An improved artificial potential field model considering vehicle velocity for autonomous driving[J]. IFAC Conference Paper, 2018, 51(31): 863-867. |
| 9 | KELLER C, DANG T, FRITZ H, et al. Active pedestrian safety by automatic braking and evasive steering[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1292-1304. |
| 10 | ZHUANG X, WU C. Modeling pedestrian crossing paths at unmarked roadways[J]. IEEE Transactions on Intelligent Transportation Systems, 2013 (3): 1-11. |
| 11 | IRYO-ASANO M, ALHAJYASEEN W. Modeling pedestrian crossing speed profiles considering speed change behavior for the safety assessment of signalized intersections[J]. Accident Analysis and Prevention, 2017, 108: 332-342. |
| 12 | 周竹萍, 蔡逸飞, 胡启洲,等. 基于巢式和交叉巢式logit的行人步行行为模型[J]. 系统工程理论与实践, 2017, 37(1): 219-227. |
| ZHOU Z P, CAI Y F, HU Q Z, et al. A pedestrian walking behavior model based on nested and cross nested logit model[J]. Systems Engineering⁃Theory & Practice, 2017, 37(1): 219-227. | |
| 13 | 蒋晓丹, 范厚明, 张琰雪, 等. 港口与运输方式及陆港联合选择的巢式Logit模型[J]. 交通运输系统工程与信息, 2018, 18(5): 32-37. |
| JIANG X D, FAN H M, ZHANG Y X, et al. Nested logit model for the joint choice of seaport, inland mode and dry port[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(5): 32-37. | |
| 14 | MATSUMI R, RAKSINCHAROENSAK P, NAGAI M. Autonomous braking control system for pedestrian collision avoidance by using potential field[J]. IFAC Proceedings Volumes, 2013, 46(21): 328-334. |
| 15 | 李霖, 朱西产, 陈海林. 驾驶员制动和转向避撞极限[J]. 同济大学学报(自然科学版), 2016, 44(11): 1743-1748. |
| LI L, ZHU X C, CHEN H L. Drivers' collision avoidance limit by braking and steering[J]. Journal of Tongji University(Nature Science Edition), 2016, 44(11): 1743-1748. | |
| 16 | 彭涛, 苏丽俐, 关志伟, 等. 高速公路弯道路段车辆紧急避撞安全换道模型[J]. 汽车工程, 2019, 41(9): 1013-1020. |
| PENG T, SU L L, GUAN Z W, et al. A safe lane⁃change model for vehicle emergent collision avoidance on curved section of highway[J]. Automotive Engineering, 2019, 41(9): 1013-1020. | |
| 17 | ESQUER A, APARICIO A,BAURÈS S, et al. Study of the application of steering support systems to complement autonomous emergency braking systems for collision avoidance strategies[C]. 25th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, 2017. |
| 18 | ECKERT A, HARTMANN B, SEVENICH M, et al. Emergency steer & brake assist-a systematic approach for system integration of two complementary driver assistance systems[J]. European Journal of Political Research, 2011, 50(4): 441-478. |
| 19 | 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6): 174-182. |
| TANG Z R, JI J, WU M Y, et al. Vehicle path planning and tracking based on improved artificial potential field method[J]. Journal of Southwest University(Nature Science Edition), 2018, 40(6): 174-182. | |
| 20 | WAHID N, ZAMZURI H, RAHMAN M, et al. Study on potential field based motion planning and control for automated vehicle collision avoidance systems[C]. 2017 IEEE International Conference on Mechatronics (ICM), IEEE, 2017: 208-213. |
| 21 | MICHAEL T, JOEL W. Artificial potential functions for highway driving with collision avoidance[C]. IEEE International Conference on Robotics and Automation, 2008: 3731-3736. |
| [1] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [2] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
| [3] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |
| [4] | Minghui Ren,Jun Liang,Long Chen,Chun Zhang,Yun Wang. Multi-AGV Path Planning for Intelligent Garage Based on Improved Conflict Search [J]. Automotive Engineering, 2023, 45(10): 1933-1943. |
| [5] | Jie Hu,Linglei Zhu,Ruinan Chen,Xinkai Zhong,Wencai Xu,Minchao Zhang. Research on Parallel Parking Path Planning Method for Narrow Parking Space [J]. Automotive Engineering, 2022, 44(7): 1040-1048. |
| [6] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [7] | Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking [J]. Automotive Engineering, 2021, 43(7): 987-994. |
| [8] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [9] | Xudong Zhang,Fukang Xu,Yuan Zou,Ningyuan Guo,Yu Zhang. A Local Path Planning Algorithm for Intelligent Wheeled Vehicle Combining TangentBug and Dubins Path [J]. Automotive Engineering, 2021, 43(6): 833-841. |
| [10] | Lin Hu,Denghui Zhou,Jing Huang,Ronghua Du,Xin Zhang. Optimal Path Planning for Electric Vehicle with Consideration of Traffic Light and Energy Consumption [J]. Automotive Engineering, 2021, 43(5): 641-649. |
| [11] | Jiaxu Zhang,Chen Wang,Jian Zhao. Path Planning and Tracking Control for Vehicle Overtaking on Curve Based on Modified Artificial Potential Field Method [J]. Automotive Engineering, 2021, 43(4): 546-552. |
| [12] | Jiaxu Zhang,Chen Wang,Chong Guo,Fei Teng,Dongran Li. column:Vehicle Parallel Parking Path Planning Based on Adaptive Neuro⁃fuzzy Inference System [J]. Automotive Engineering, 2021, 43(3): 323-329. |
| [13] | Xiaojian Wu,Dong Yan,Aichun Wang,Juhua Huang,Lei Wu,Bing Zhou. Research on Improved Artificial Potential Field Path Planning Integrating Prediction of Preceding Vehicle Trajectory [J]. Automotive Engineering, 2021, 43(12): 1752-1761. |
| [14] | Zhu Bing, Han Jiayi, Zhao Jian, Liu Shuai, Deng Weiwen. Safety Field-based Improved RRT* Algorithm for Path Planning of Intelligent Vehicle [J]. Automotive Engineering, 2020, 42(9): 1145-1150. |
| [15] | Xiong Ying, Mao Xuesong. Research on the Method of Navigating Autonomous Driving Vehicle Through Expressway Toll Region [J]. Automotive Engineering, 2020, 42(9): 1263-1269. |
|