Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (7): 997-1008.doi: 10.19562/j.chinasae.qcgc.2022.07.006
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Jian Zhao1,Dongjian Song1,Bing Zhu1( ),Hangzhe Wu2,column:Han Jiayi1,Yuxiang Liu1
),Hangzhe Wu2,column:Han Jiayi1,Yuxiang Liu1
Received:2021-11-15
Revised:2022-02-20
Online:2022-07-25
Published:2022-07-20
Contact:
Bing Zhu
E-mail:zhubing@jlu.edu.cn
Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid[J].Automotive Engineering, 2022, 44(7): 997-1008.
"


"
"
| IDM参数 | |||||
|---|---|---|---|---|---|
| 取值 | 27.19 | 6.73 | 1.53 | 2.01 | 1.77 |
"
"
"
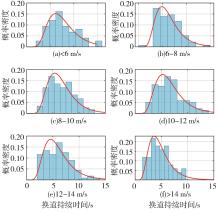
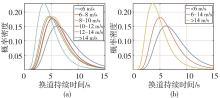
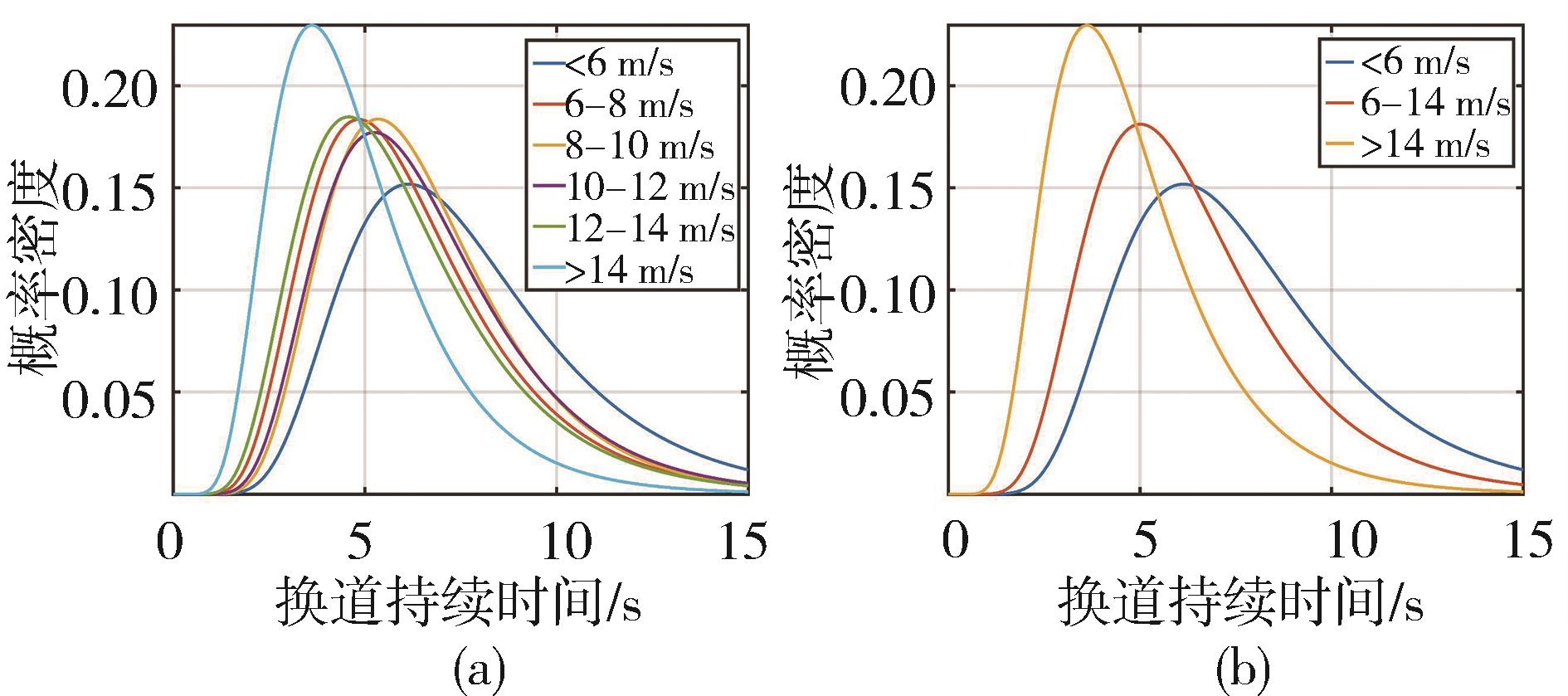
| 初始速度区间/(m·s-1) | ||
|---|---|---|
| <6 | 1.971 3 | 0.395 8 |
| 6-14 | 1.779 6 | 0.404 7 |
| >14 | 1.476 7 | 0.436 3 |
"
"
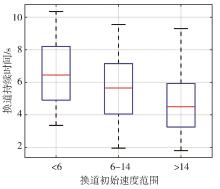
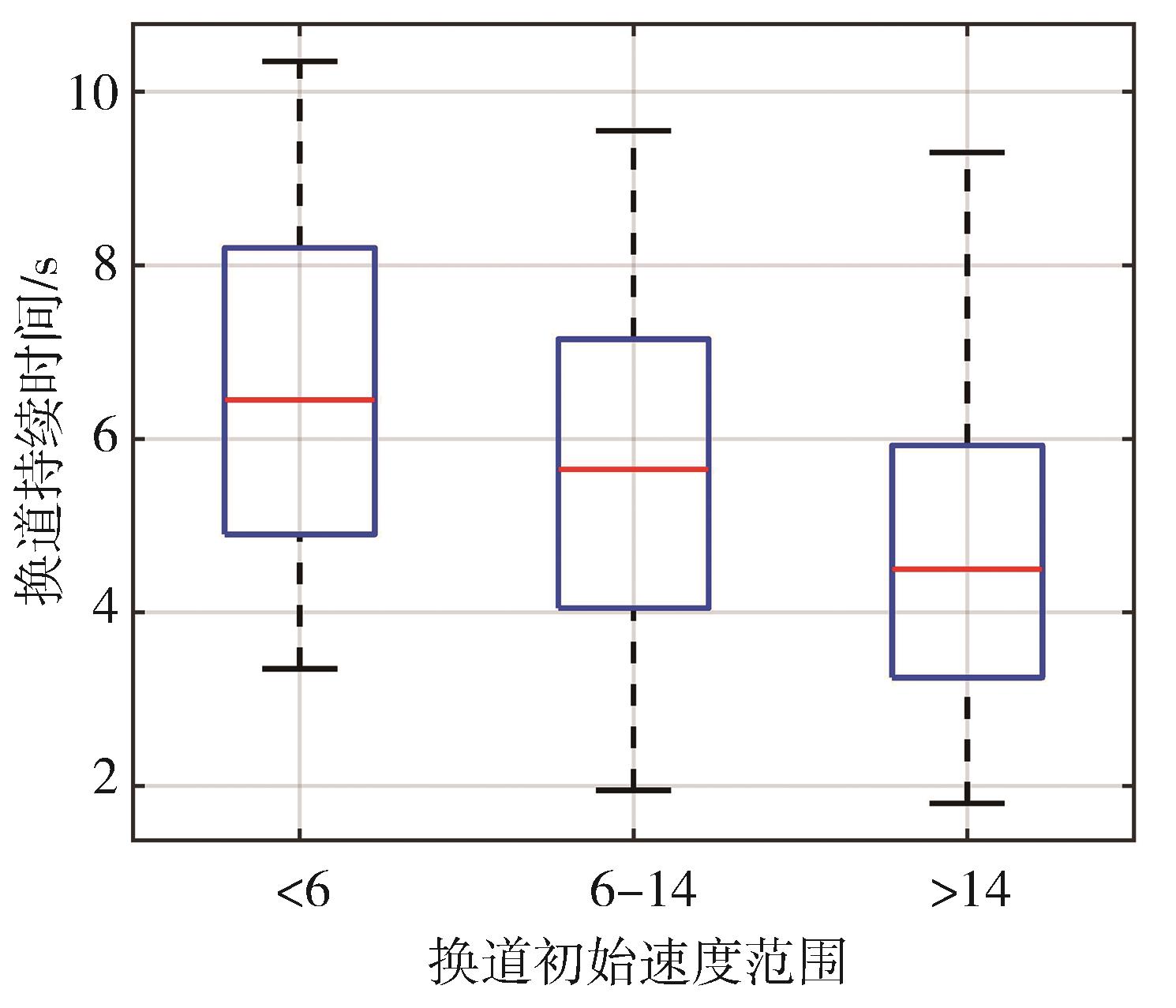
| 初始速度区间/(m·s-1) | 换道持续时间/s |
|---|---|
| <6 | 6.6 |
| 6-14 | 5.7 |
| >14 | 4.7 |

"
"
| 预测时间窗长度/s | RMSE/m |
|---|---|
| 6.6 | 5.45 |
| 5.7 | 4.96 |
| 4.7 | 3.7 |

"
"


"

"
| (速度优势,距离优势,安全性优势) | 比例/% |
|---|---|
| (1,1,1) | 15.57 |
| (1,1,0) | 8.98 |
| (1,0,1) | 35.63 |
| (1,0,0) | 17.07 |
| (0,0,0) | 9.58 |
"
"
"
"
| 真实意图 | LCL | LK | LCR | |
|---|---|---|---|---|
| 识别意图 | LCL | 0.995 7 | 0.085 5 | 0.012 4 |
| LK | 0.002 9 | 0.910 3 | 0.055 9 | |
| LCR | 0.001 4 | 0.004 3 | 0.931 7 | |
"

"
| 意图 | 指标 | 模型类别 | ||
|---|---|---|---|---|
| Social-LSTM | Bi-LSTM-2 | |||
| LCL | 精确率 | 99.71 | 99.54 | 91.67 |
| 召回率 | 94.71 | 89.02 | 84.26 | |
| F1分数 | 97.14 | 94.28 | 87.81 | |
| LK | 精确率 | 85.37 | 72.47 | 71.74 |
| 召回率 | 93.75 | 92.86 | 88.39 | |
| F1分数 | 89.36 | 81.84 | 79.21 | |
| LCR | 精确率 | 90.36 | 89.02 | 82.28 |
| 召回率 | 98.68 | 96.05 | 85.53 | |
| F1分数 | 94.34 | 92.41 | 83.87 | |
| 准确率 | 95.06 | 91.13 | 85.28 | |
| 1 | YANG X, CHEN L, WANG H, et al. Driver lane change intention inference for intelligent vehicles: framework, survey, and challenges[J]. IEEE Transaction on Vehicular Technology, 2019, 68(5): 4377-4390. |
| 2 | BALAL E, CHEU L C, SARKODIE-GYAN T. A binary decision model for discretionary lane changing move based on fuzzy inference system [J]. Transportation Research Part C: Emerging Technologies, 2016, 67: 47-61 |
| 3 | 谢枫, 娄静涛, 赵凯, 等. 基于行为识别和曲率约束的车辆轨迹预测方法研究[J]. 汽车工程, 2019, 41(9): 1036-1042. |
| XIE F, LOU J, ZHAO K, et al. A research on vehicle trajectory prediction method based on behavior recognition and curvature constraints [J]. Automotive Engineering, 2019, 41(9): 1036-1042. | |
| 4 | 谢辉, 高斌, 熊硕, 等. 结构化道路中动态车辆的轨迹预测[J]. 汽车安全与节能学报, 2019, 10(4): 413-422. |
| XIE H, GAO B, XIONG S, et al. Trajectory prediction of dynamic vehicles in structured roads [J]. Journal of Automotive Safety and Energy, 2019, 10(4): 413-422. | |
| 5 | BAHRAM M, LAWITZKY A, FRIEDRICHS J, et al. A game-theoretic approach to replanning-aware interactive scene prediction and planning [J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 3981-3992. |
| 6 | KASPER D, WEIDL G, DANG T, et al. Object-oriented bayesian networks for detection of lane change maneuvers [J]. IEEE Intelligent Transportation Systems Magazine, 2012, 4(3): 19–31. |
| 7 | TALEBPOUR A, MAHMASSANI H, HAMDAR S. Modeling lane-changing behavior in a connected environment: a game theory approach [J]. Transportation Research Part C: Emerging Technologies, 2015, 59: 216-232. |
| 8 | YU H, TSENG H, LANGARI R. A human-like game theory-based controller for automatic lane changing [J]. Transportation Research Part C: Emerging Technologies, 2018, 88: 140-158. |
| 9 | BAHRAM M, HUBMANN C, LAWITZKY A, et al. A combined model- and learning-based framework for interaction-aware maneuver prediction [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1538-1550. |
| 10 | 宗长富, 王畅, 何磊, 等. 基于双层隐式马尔科夫模型的驾驶意图辨识[J]. 汽车工程, 2011, 33(8): 701-706. |
| ZONG C, WANG C, HE L, et al. Driving intention recognition based on double-layer HMM[J]. Automotive Engineering, 2011, 33(8): 701-706. | |
| 11 | 刘志强, 吴雪刚, 倪捷,等. 基于HMM和SVM级联算法的意图识别算法 [J]. 汽车工程, 2018, 40(7): 858-864. |
| LIU Z, WU X, NI J, et al. Driving intention recognition based on hmm and svm cascade algorithm [J]. Automotive Engineering, 2018, 40(7): 858-864. | |
| 12 | DONG F, FANG Z, JIA B, et al. A data-driven lane-changing model based on deep learning [J]. Transportation Research Part C: Emerging Technologies, 2019, 106: 41-60. |
| 13 | 施冬梅, 肖隆. 基于改进长短时记忆网络的驾驶行为检测方 法研究[J]. 汽车工程, 2021, 43(8): 1203-1209. |
| SHI D, XIAO L. Study on driving behavior detection method based on improved long and short-term memory network [J]. Automotive Engineering, 2021, 43(8): 1203-1209. | |
| 14 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. |
| JI X, FEI C, HE X, et al. Intention recognition and trajectory prediction for vehicles using lstm network [J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. | |
| 15 | DAI S, LI L, LI Z, Modeling vehicle interactions via modified LSTM models for trajectory prediction [J]. IEEE Access, 2019, 7: 38287-38296. |
| 16 | 宋晓琳, 曾艳兵, 曹昊天, 等. 基于长短期记忆网络的换道意图识别方法[J]. 中国公路学报, 2021, 34(11): 236-245. |
| SONG X, ZENG Y, CAO H, et al. Lane change intention recognition method based on an LSTM Network [J]. China Journal of Highway and Transport,2021,34(11):236-245. | |
| 17 | 蔡英凤, 邰康盛, 王海, 等. 无人驾驶汽车周边车辆行为识别算法研究[J]. 汽车工程, 2020, 42(11): 1464-1472, 1505. |
| CAI Y, TAI K, WANG H, et al. Research on behavior recognition algorithm of surrounding vehicles for driverless car [J]. Automotive Engineering, 2020, 42(11): 1464-1472, 1505. | |
| 18 | ZHAO L, SONG Y, ZHANG C, et al. T-GCN: a temporal graph convolutional network for traffic prediction [J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(9): 3848-3858. |
| 19 | JEON H, CHOI J, KUM D. SCALE-Net: scalable vehicle trajectory prediction network under random number of interacting vehicles via edge-enhanced graph convolutional neural network [J]. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2020. |
| 20 | Federal Highway Adminnistration. NGSIM-Next Generation Simulation [EB/OL]. http://ops. fhwa. dot. Gov/reafficanalysistools/ngsim. |
| 21 | MA L, QU S. A sequence to sequence learning based car-following model for multi-step predictions considering reaction delay [J]. Transportation Research Part C: Emerging Technologies, 2020, 120. |
| 22 | WANG J, WU J, LI Y. The driving safety field based on driver-vehicle-road interactions [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. |
| [1] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [2] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [3] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [4] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [7] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [8] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [9] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [10] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
| [11] | Xinyu Chen,Lijun Qian,Qidong Wang. Eco-driving Control at Signalized Intersections with Consideration of Time Delay [J]. Automotive Engineering, 2022, 44(7): 960-968. |
| [12] | Dongjian Song,Bing Zhu,Jian Zhao,Jiayi Han,Yanchen Liu. Human-Like Behavior Decision-Making of Intelligent Vehicles Based on Driving Behavior Generation Mechanism [J]. Automotive Engineering, 2022, 44(12): 1797-1808. |
| [13] | Xiujian Yang,Xinyu Yin,Jin Gao. Interference Suppression Characteristics of Vehicle Platoon with Periodic Type Control Structure [J]. Automotive Engineering, 2022, 44(12): 1834-1843. |
| [14] | Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. |
| [15] | Qiaobin Liu,Lu Yang,Bolin Gao,Jianqiang Wang,Keqiang Li. Car Following Model for Intelligent Vehicles Based on Dynamic Balance of Perception Risk [J]. Automotive Engineering, 2022, 44(11): 1627-1635. |