Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (8): 1448-1456.doi: 10.19562/j.chinasae.qcgc.2023.08.015
Special Issue: 智能网联汽车技术专题-规划&决策2023年
Previous Articles Next Articles
Qihui Hu1,Yingfeng Cai1,Hai Wang2( ),Long Chen1,Zhaozhi Dong3,Qingchao Liu1
),Long Chen1,Zhaozhi Dong3,Qingchao Liu1
Received:2022-12-29
Revised:2023-02-18
Online:2023-08-25
Published:2023-08-17
Contact:
Hai Wang
E-mail:wanghai1019@163.com
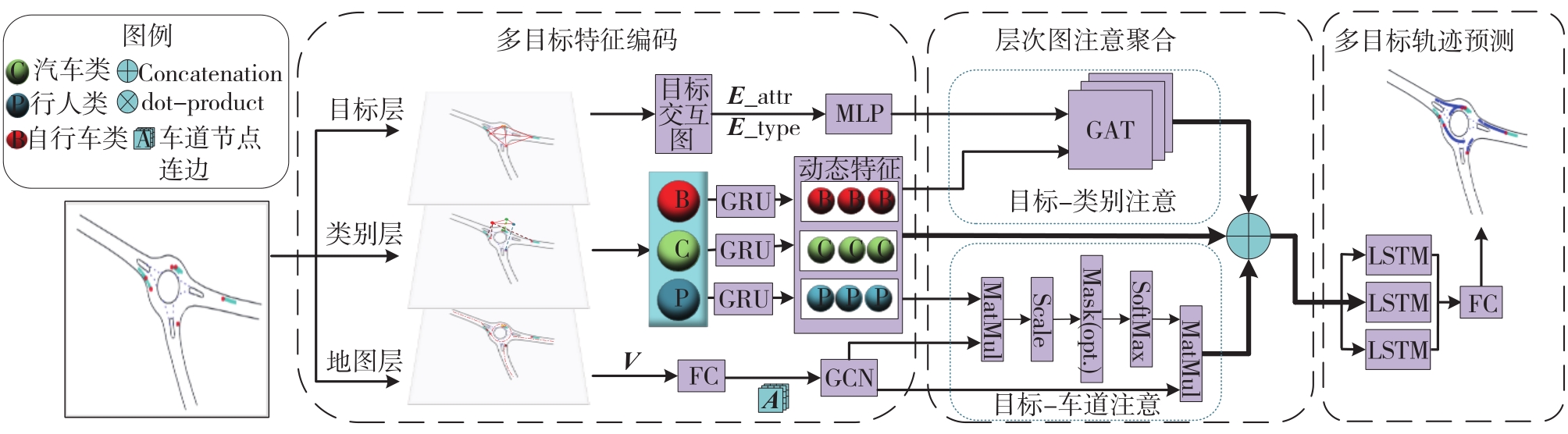
Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention[J].Automotive Engineering, 2023, 45(8): 1448-1456.

"

"
"
"
| 模型 | minADE_5 | minADE_10 | minFDE_1 |
|---|---|---|---|
| GRIP | 1.96 | 1.50 | 10.79 |
Trajectron++ SG-Net Lapred | 1.88 1.86 1.53 | 1.51 1.40 1.12 | 9.52 9.25 8.12 |
| HGATP(本文) | 1.52 | 1.15 | 8.42 |
"
| 模型 | ADE@3 s/m | FDE@3 s/m |
|---|---|---|
| Seq2Seq | 5.54 | 19.27 |
GCN GRIP Trajectron++ HEAT | 3.94 2.65 1.47 1.36 | 12.35 9.82 5.12 3.59 |
| HGATP(本文) | 1.26 | 4.31 |
"

"

"

| 1 | LEFÈVRE S, LAUGIER C, IBAÑEZ-GUZMÁN J. Exploiting map information for driver intention estimation at road intersections[C]. 2011 IEEE Intelligent Vehicles Symposium (iv). IEEE, 2011: 583-588. |
| 2 | AOUDE G S, DESARAJU V R, STEPHENS L H, et al. Behavior classification algorithms at intersections and validation using naturalistic data[C]. 2011 IEEE Intelligent Vehicles Symposium (iv). IEEE, 2011: 601-606. |
| 3 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 961-971. |
| 4 | GUPTA A, JOHNSON J, FEI-FEI L, et al. Social GAN: socially acceptable trajectories with generative adversarial networks[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 2255-2264. |
| 5 | BI H, FANG Z, MAO T, et al. Joint prediction for kinematic trajectories in vehicle-pedestrian-mixed scenes[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 10383-10392. |
| 6 | JAIN A, ZAMIR A R, SAVARESE S, et al. Structural-RNN: deep learning on spatio-temporal graphs[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 5308-5317. |
| 7 | LI X, YING X, CHUAH M C. Grip++: enhanced graph-based interaction-aware trajectory prediction for autonomous driving[J]. arXiv preprint arXiv:, 2019. |
| 8 | YU C, MA X, REN J, et al. Spatio-temporal graph transformer networks for pedestrian trajectory prediction[C]. Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23-28, 2020, Proceedings, Part XII 16. Springer International Publishing, 2020: 507-523. |
| 9 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 10 | GAO J, SUN C, ZHAO H, et al. Vectornet: encoding HD maps and agent dynamics from vectorized representation[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11525-11533. |
| 11 | GU J, SUN C, ZHAO H. Densetnt: end-to-end trajectory prediction from dense goal sets[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 15303-15312. |
| 12 | LIANG M, YANG B, HU R, et al. Learning lane graph representations for motion forecasting[C]. Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23-28, 2020, Proceedings, Part II 16. Springer International Publishing, 2020: 541-556. |
| 13 | CHANDRA R, BHATTACHARYA U, BERA A, et al. Traphic: trajectory prediction in dense and heterogeneous traffic using weighted interactions[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 8483-8492. |
| 14 | MA Y, ZHU X, ZHANG S, et al. Trafficpredict: trajectory prediction for heterogeneous traffic-agents[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2019, 33(1): 6120-6127. |
| 15 | CARRASCO S, LLORCA D F, SOTELO M A. Scout: socially-consistent and understandable graph attention network for trajectory prediction of vehicles and vrus[C]. 2021 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2021: 1501-1508. |
| 16 | ZHENG F, WANG L, ZHOU S, et al. Unlimited neighborhood interaction for heterogeneous trajectory prediction[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 13168-13177. |
| 17 | XU K, BA J, KIROS R, et al. Show, attend and tell: neural image caption generation with visual attention[C]. International Conference on Machine Learning. PMLR, 2015: 2048-2057. |
| 18 | CAI Y, WANG Z, WANG H, et al. Environment-attention network for vehicle trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11216-11227. |
| 19 | 张雪翔, 吴训成, 史训昂, 等. LSTGHP: 基于分层时空图的异构代理轨迹分布预测[J]. 软件, 2020, 41(9): 36-42. |
| ZHANG Xuexiang, WU Xuncheng, SHI Xunang, et al. LSTGHP: heterogeneous agent trajectory distribution prediction based on layered spatio-temporal graph[J]. Computer Engineering & Software,2020,41(9):36-42. | |
| 20 | MO X, HUANG Z, XING Y, et al. Multi-agent trajectory prediction with heterogeneous edge-enhanced graph attention network[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9554-9567. |
| 21 | CAESAR H, BANKITI V, LANG A H, et al. Nuscenes: a multimodal dataset for autonomous driving[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11621-11631. |
| 22 | ZHAN W, SUN L, WANG D, et al. Interaction dataset: an international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[J]. arXiv preprint arXiv:, 2019. |
| 23 | SALZMANN T, IVANOVIC B, CHAKRAVARTY P, et al. Trajectron++: dynamically-feasible trajectory forecasting with heterogeneous data[C]. Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23-28, 2020, Proceedings, Part XVIII 16. Springer International Publishing, 2020: 683-700. |
| 24 | WANG C, WANG Y, XU M, et al. Stepwise goal-driven networks for trajectory prediction[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2716-2723. |
| 25 | KIM B D, PARK S H, LEE S, et al. Lapred: lane-aware prediction of multi-modal future trajectories of dynamic agents[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 14636-14645. |
| [1] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [2] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [3] | Jing Lian,Shuoxian Li,Yidi Liu,Dongfang Yang,Linhui Li. Goal Supervised Attention Network for Vehicle Trajectory Prediction [J]. Automotive Engineering, 2023, 45(8): 1353-1361. |
| [4] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [5] | Zhenhai Gao, Mingxi Bao, Fei Gao, Minghong Tang. The Method of Probabilistic Multi-modal Expected Trajectory Prediction Based on LSTM [J]. Automotive Engineering, 2023, 45(7): 1145-1152. |
| [6] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [7] | Yong Han,Xujie Lin,Hongwu Huang,Hongyu Cai,Jinrong Luo,Yangting Li. An Approach for Predicting Pedestrian Trajectories in Typical Car Crash Scenarios [J]. Automotive Engineering, 2023, 45(6): 1022-1030. |
| [8] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [9] | Xiang Gao,Long Chen,Xinye Wang,Xiaoxia Xiong,Yicheng Li,Yuexia Chen. Intelligent Vehicle Driving Risk Assessment Method Based on Trajectory Prediction [J]. Automotive Engineering, 2023, 45(4): 588-597. |
| [10] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [11] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [12] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [13] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
| [14] | Xinyu Chen,Lijun Qian,Qidong Wang. Eco-driving Control at Signalized Intersections with Consideration of Time Delay [J]. Automotive Engineering, 2022, 44(7): 960-968. |
| [15] | Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid [J]. Automotive Engineering, 2022, 44(7): 997-1008. |
|