Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (8): 1468-1478.doi: 10.19562/j.chinasae.qcgc.2023.08.017
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2023年
Previous Articles Next Articles
Wenguang Wu( ),Shuangyue Tian,Zhiyong Zhang,Bin Zhang
),Shuangyue Tian,Zhiyong Zhang,Bin Zhang
Received:2023-01-16
Revised:2023-02-21
Online:2023-08-25
Published:2023-08-17
Contact:
Wenguang Wu
E-mail:wwglq@csust.edu.cn
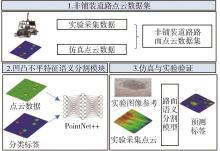
Wenguang Wu,Shuangyue Tian,Zhiyong Zhang,Bin Zhang. Research on Semantic Segmentation of Uneven Features of Unpaved Road[J].Automotive Engineering, 2023, 45(8): 1468-1478.

"

"
"
"
"
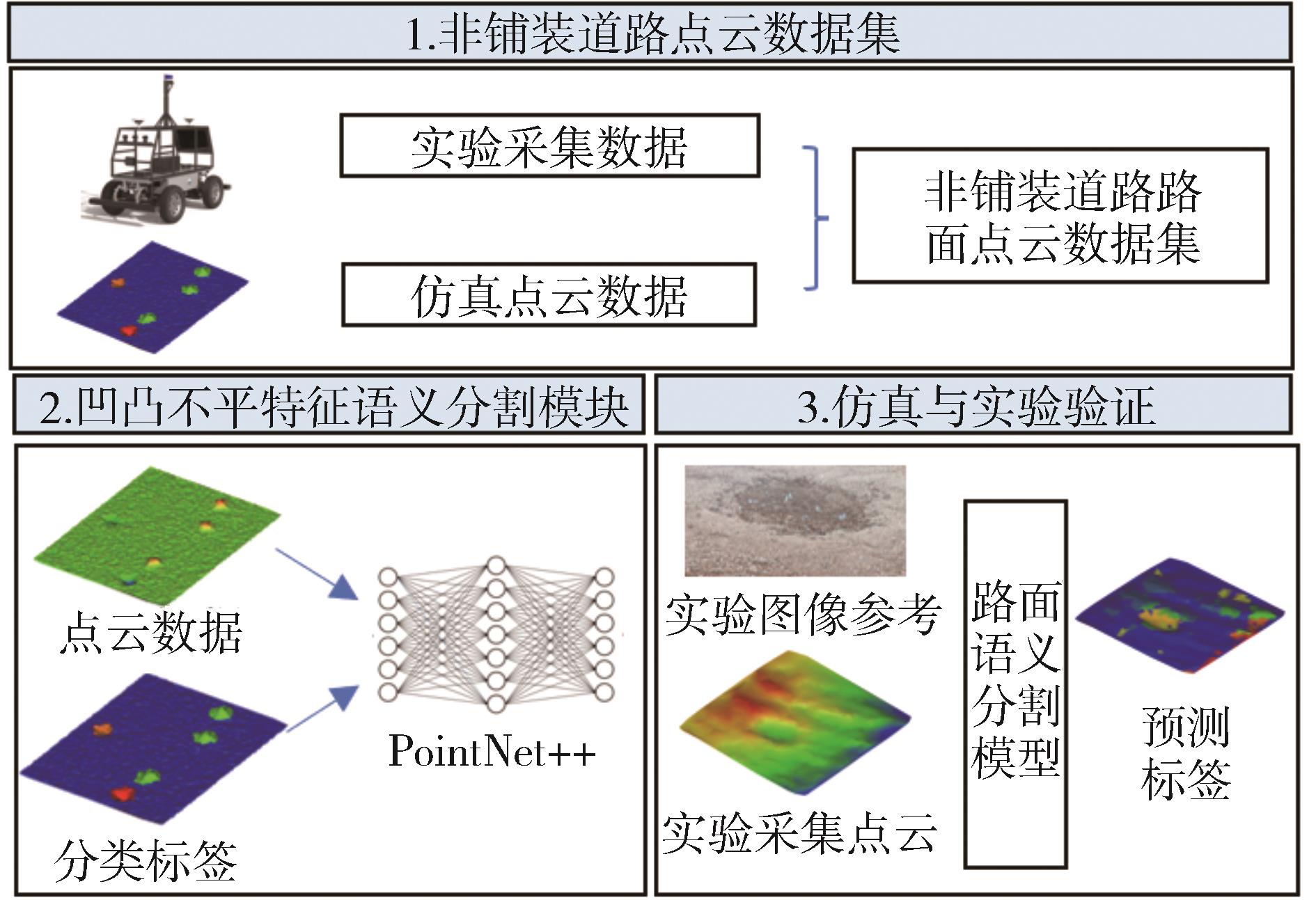
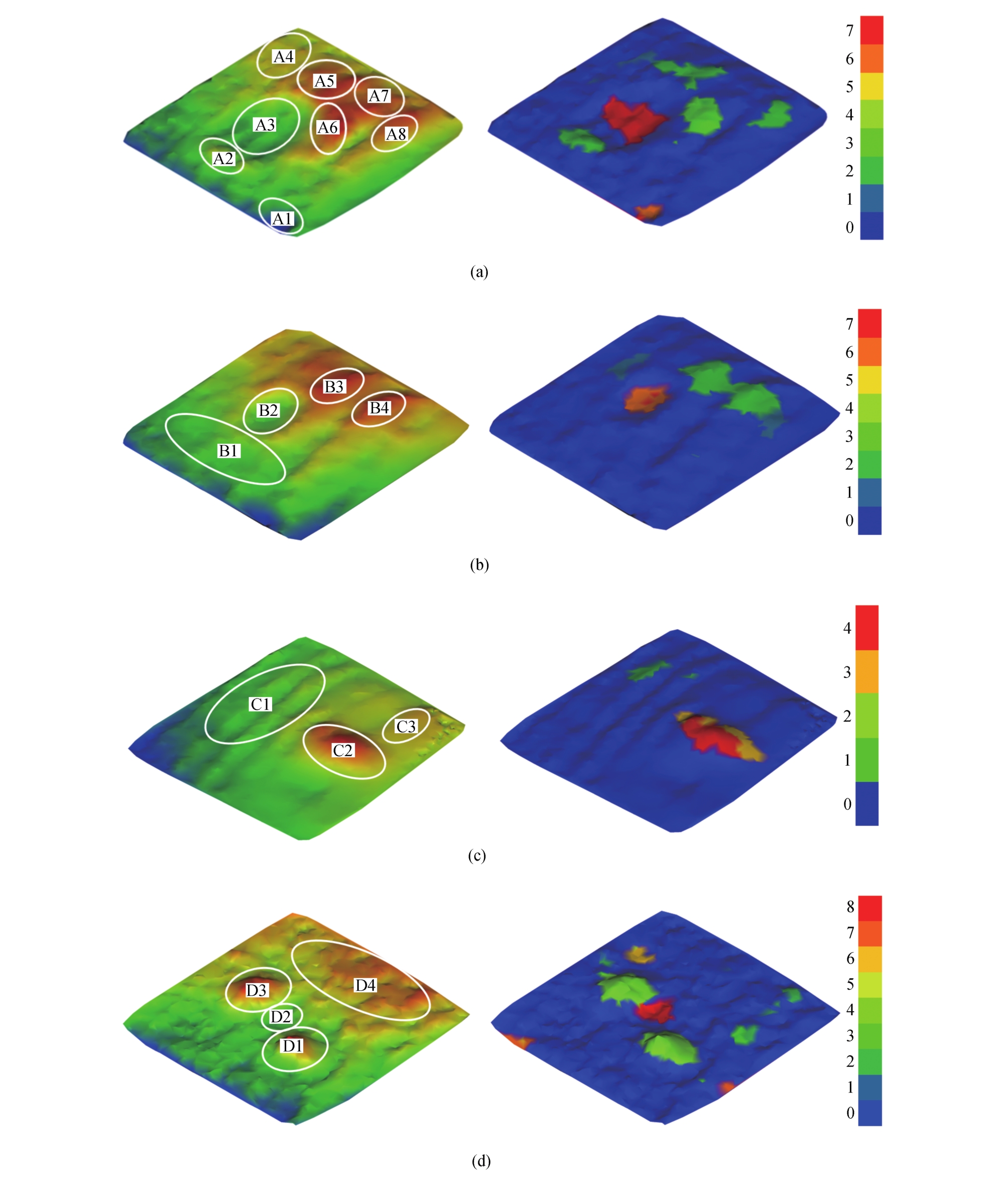
| 类型 | 标签(label) | 最大幅值范围(深度为负, 高度为正,单位: |
|---|---|---|
| 平缓路面 | 0 | -0.05~0.05 |
| 小凸起 | 1 | 0.05~0.15 |
| 较小凸起 | 2 | 0.15~0.25 |
| 较大凸起 | 3 | 0.25~0.35 |
| 大凸起 | 4 | >0.35 |
| 小凹坑 | 5 | -0.15~-0.05 |
| 较小凹坑 | 6 | -0.25~-0.15 |
| 较大凹坑 | 7 | -0.35~-0.25 |
| 大凹坑 | 8 | <-0.35 |
"

"
"
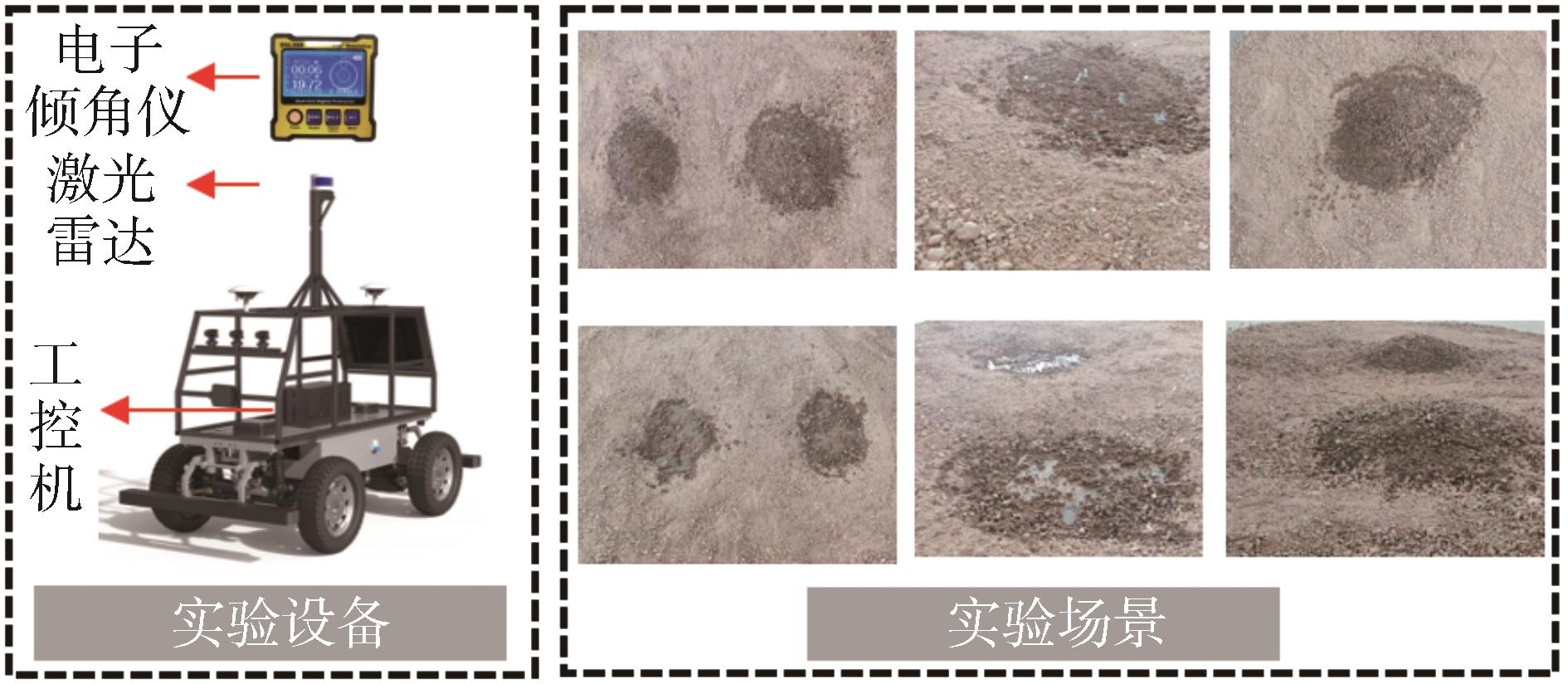
| 设备 | 参数 | 数值 |
|---|---|---|
| 激光雷达 | 测量精度 | ±3 cm |
| 垂直视角 | -15°~15° | |
| 垂直分辨率 | 2° | |
| 水平视角 | 360° | |
| 水平分辨率 | 0.1°~0.4° | |
| 电子倾角仪 | 测量范围 | 单轴:360° 双轴:±40° |
| 分辨率 | 0.02° | |
| 精度 | ±0.2° |
"
"
"
"
| 项目 | 参数 | 数值 |
|---|---|---|
| 训练相关 | 样本数量 | 3 500 |
| 批尺寸 | 36 | |
| 训练轮次 | 251 | |
| 初始学习率 | 0.001 | |
| 学习衰减步长 | 50 | |
| 学习衰减率 | 0.5 | |
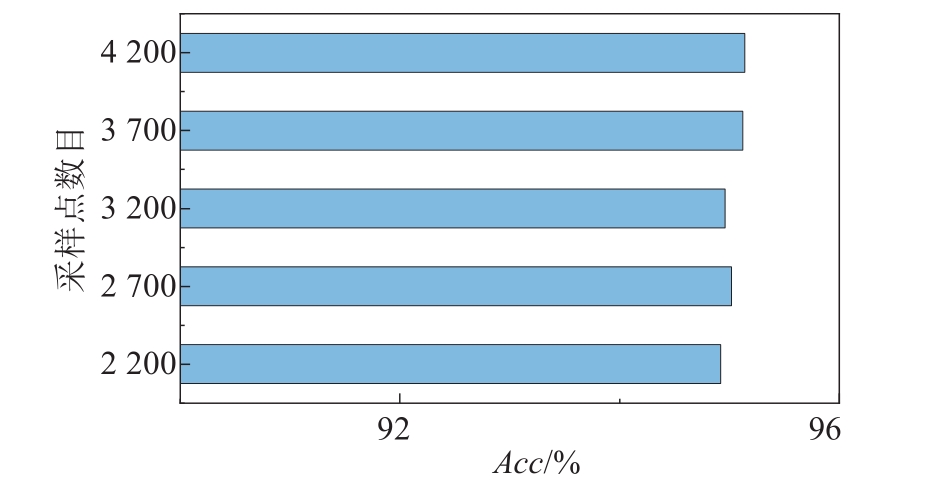
| 采样点数量 | 4 200 | |
| Adam算法相关 | 梯度衰减因子 | 0.9 |
| 平方梯度衰减因子 | 0.99 | |
| 偏置小量 |
"

"
| 数据集 | 准确率 | 平均联合交集 |
|---|---|---|
| 训练集 | 95.295 | 0.774 870 |
| 验证集 | 95.185 | 0.766 122 |
| 测试集 | 95.130 | 0.634 600 |
"
"

"
"
"
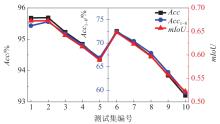
| 测试集编号 | 路面点云范围(长×宽,单位:m) | 测试集编号 | 路面点云范围(长×宽,单位:m) |
|---|---|---|---|
| 1 | 6 | ||
| 2 | 7 | ||
| 3 | 8 | ||
| 4 | 9 | ||
| 5 | 10 |
"
| 1 | LIU W, WANG R, DING R, et al. On-line estimation of road profile in semi-active suspension based on unsprung mass acceleration[J]. Mechanical Systems and Signal Processing, 2020, 135: 106370. |
| 2 | HASSEN D B, MILADI M, ABBES M S, et al. Road profile estimation using the dynamic responses of the full vehicle model[J]. Applied Acoustics, 2019, 147: 87-99. |
| 3 | 刘浪, 张志飞, 鲁红伟, 等. 基于增广卡尔曼滤波并考虑车辆加速度的路面不平度识别[J]. 汽车工程, 2022, 44(2): 247-255,297. |
| LIU Lang, ZHANG Zhifei, LU Hongwei, et al. Road roughness identification based on augmented kalman filtering with consideration of vehicle acceleration[J]. Automotive Engineering, 2022, 44(2): 247-255,297. | |
| 4 | 梁冠群, 赵通, 王岩, 等. 基于LSTM网络的路面不平度辨识方法[J]. 汽车工程, 2021, 43(4): 509-517,628. |
| LIANG Guanqun, ZHAO Tong, WANG Yan, et al. Road unevenness identification based on LSTM network[J]. Automotive Engineering, 2021, 43(4): 509-517,628. | |
| 5 | LIANG G, ZHAO T, SHANGGUAN Z, et al. Experimental study of road identification by LSTM with application to adaptive suspension damping control[J]. Mechanical Systems and Signal Processing, 2022, 177: 109197. |
| 6 | QIN Y, XIANG C, WANG Z, et al. Road excitation classification for semi-active suspension system based on system response[J]. Journal of Vibration and Control, 2018, 24(13): 2732-2748. |
| 7 | YIĞIT H, KÖYLÜ H, EKEN S. Estimation of road surface type from brake pressure pulses of ABS[J]. Expert Systems with Applications, 2023, 212: 118726. |
| 8 | YOUSEFZADEH M, AZADI S, SOLTANI A. Road profile estimation using neural network algorithm[J]. Journal of Mechanical Science and Technology, 2010, 24(3): 743-754. |
| 9 | NGWANGWA H M, HEYNS P S, LABUSCHAGNE F J J, et al. Reconstruction of road defects and road roughness classification using vehicle responses with artificial neural networks simulation[J]. Journal of Terramechanics, 2010, 47(2): 97-111. |
| 10 | LUSHNIKOV N, LUSHNIKOV P. Methods of assessment of accuracy of road surface roughness measurement with profilometer[J]. Transportation Research Procedia, 2017, 20: 425-429. |
| 11 | KOCH C, GEORGIEVA K, KASIREDDY V, et al. A review on computer vision based defect detection and condition assessment of concrete and asphalt civil infrastructure[J]. Advanced Engineering Informatics, 2015, 29(2): 196-210. |
| 12 | YOUSAF M H, AZHAR K, MURTAZA F, et al. Visual analysis of asphalt pavement for detection and localization of potholes[J]. Advanced Engineering Informatics, 2018, 38: 527-537. |
| 13 | TEDESCHI A, BENEDETTO F. A real-time automatic pavement crack and pothole recognition system for mobile android-based devices[J]. Advanced Engineering Informatics, 2017, 32: 11-25. |
| 14 | HADJI I, WILDES R P. What do we understand about convolutional networks?[J]. arXiv preprint arXiv:, 2018. |
| 15 | BARAT C, DUCOTTET C. String representations and distances in deep convolutional neural networks for image classification[J]. Pattern Recognition, 2016, 54: 104-115. |
| 16 | 司念文, 张文林, 屈丹, 等. 卷积神经网络表征可视化研究综述[J]. 自动化学报, 2022, 48(8): 1890-1920. |
| SI Nianwen, ZHANG WenLin, QU Dan, et al. Representation visualization of convolutional neural networks: a survev[J]. ACTA AUTOMATICA SINICA, 2022, 48(8): 1890-1920. | |
| 17 | 沙爱民,童峥,高杰.基于卷积神经网络的路表病害识别与测量[J]. 中国公路学报, 2018, 31(1): 1-10. |
| SHA Aimin, TONG Zheng, GAO Jie. Recognition and measurement of pavement disasters based on convolutional neural networks[J]. China J. Highw. Transp., 2018, 31(1): 1-10. | |
| 18 | REN S, HE K, GIRSHICK R, et al. Faster r-cnn: towards real-time object detection with region proposal networks[J]. Advances in Neural Information Processing Systems, 2015, 28. |
| 19 | LI J, LIU T, WANG X. Advanced pavement distress recognition and 3D reconstruction by using GA-DenseNet and binocular stereo vision[J]. Measurement, 2022, 201: 111760. |
| 20 | 李小路, 周依尔, 毕腾飞, 等. 轻量型感知激光雷达关键技术发展综述[J]. 中国激光, 2022: 1-28. |
| LI Xiaolu, ZHOU Yier, BI Tengfei, et al. Review on key technologies of lightweight type-aware LiDAR[J]. Chinese Journal of Lasers, 2022: 1-28. | |
| 21 | BENEDEK C, MAJDIK A, NAGY B, et al. Positioning and perception in LIDAR point clouds[J]. Digital Signal Processing, 2021, 119: 103193. |
| 22 | THEUNISSEN J, TOTA A, GRUBER P, et al. Preview-based techniques for vehicle suspension control: A state-of-the-art review[J]. Annual Reviews in Control, 2021, 51: 206-235. |
| 23 | ZHAO D, WANG L, LI Y, et al. Extraction of preview elevation of road based on 3D sensor[J]. Measurement, 2018, 127: 104-114. |
| 24 | 刘家银,唐振民,王安东, 等. 基于多激光雷达与组合特征的非结构化环境负障碍物检测[J]. 机器人, 2017, 39(5): 638-651. |
| LIU Jiayin, TANG Zhenmin, WANG Andong, et al. Negative obstacle detection in unstructured environment based on multiple LiDARs and compositional features[J]. Robot, 2017, 39(5): 638-651. | |
| 25 | GUO Y, WANG H, HU Q, et al. Deep learning for 3d point clouds: a survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 43(12): 4338-4364. |
| 26 | QI C R, SU H, MO K, et al. Pointnet: deep learning on point sets for 3d classification and segmentation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2017: 652-660. |
| 27 | QI C R, YI L, SU H, et al. Pointnet++: deep hierarchical feature learning on point sets in a metric space[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 28 | BEHLEY J, GARBADE M, MILIOTO A, et al. Semantickitti: a dataset for semantic scene understanding of lidar sequences[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 9297-9307. |
| 29 | SUN P, KRETZSCHMAR H, DOTIWALLA X, et al. Scalability in perception for autonomous driving: Waymo open dataset[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 2446-2454. |
| 30 | CAESAR H, BANKITI V, LANG A H, et al. Nuscenes: a multimodal dataset for autonomous driving[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11621-11631. |
| 31 | 胡宇辉,王旭,胡家铭, 等. 越野环境下无人驾驶车辆技术研究综述[J]. 北京理工大学学报, 2021, 41(11): 1137-1144. |
| HU Yuhui, WANG Xu, HU Jiaming, et al. An overview on unmanned vehicle technology in off-road environment[J]. Transactions of Beijing Institute of Technology, 2021, 41(11): 1137-1144. | |
| 32 | SHIN Y H, SON K W, LEE D C. Semantic segmentation and building extraction from airborne LiDAR data with multiple return using PointNet++[J]. Applied Sciences, 2022, 12(4): 1975. |
| 33 | 王乾廷,伊启中,林永南.越野路面不平度与车轮跳离路面量间的关系[J]. 系统仿真学报, 2008(11): 3040-3042. |
| WANG Qianting, YI Qizhong, LIN Yongnan. Relation between off-road terrain unevenness and wheel jumping estimation[J]. Journal of System Simulation, 2008(11): 3040-3042. |
| [1] | Zuliang Jin,Hanbing Wei,Liu Zheng,Lu Lou,Guofeng Zheng. Lightweight Semantic Segmentation Method Based on Local Window Cross Attention [J]. Automotive Engineering, 2023, 45(9): 1617-1625. |
| [2] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [3] | Tao Lu,Xin Jin,Yifei Liao,Shengjie Huang,Yilin Yang,Guotao Xie,Xiaohui Qin. Visual SLAM Based on Jacobian Null-space Marginalization [J]. Automotive Engineering, 2023, 45(8): 1457-1467. |
| [4] | Lei Zhang, Keren Guan, Xiaolin Ding, Pengyu Guo, Zhenpo Wang, Fengchun Sun. Tire-Road Friction Estimation Method Based on Image Recognition and Dynamics Fusion [J]. Automotive Engineering, 2023, 45(7): 1222-1234. |
| [5] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [6] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |
| [7] | Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid [J]. Automotive Engineering, 2022, 44(8): 1173-1182. |
| [8] | Liang Chu,Cheng Chang,Xu Wang,Di Zhao,Yanwu Xu. Research on Brake-by-Wire System and Pressure Control Algorithm for Advanced Automatic Driving [J]. Automotive Engineering, 2022, 44(3): 308-318. |
| [9] | Dafang Wang,Lei Liu,Jiang Cao,Gang Zhao,Wenshuo Zhao,Wei Tang. Semantic Segmentation Method of Autonomous Driving Images Based on Atrous Spatial Pyramid Pooling [J]. Automotive Engineering, 2022, 44(12): 1818-1824. |
| [10] | Dafang Wang,Hai Shang,Jiang Cao,Tao Wang,Xiangteng Xia,Yulin Han. Semantic Segmentation Method of Point Cloud in Automatic Driving Scene Based on Self-attention Mechanism [J]. Automotive Engineering, 2022, 44(11): 1656-1664. |
| [11] | Shengjie Huang,Manjiang Hu,Yunshui Zhou,Zhouping Yin,Xiaohui Qin,Yougang Bian,Qianqian Jia. Vehicle Visual SLAM in Dynamic Scenes Based on Semantic Segmentation and Motion Consistency Constraints [J]. Automotive Engineering, 2022, 44(10): 1503-1510. |
| [12] | Zilong Liu,Xiangfei Shen. Small Target Detection Method for Dual-Modal Autonomous Driving with Yolo v5 and Lite-HRNet Fusion [J]. Automotive Engineering, 2022, 44(10): 1511-1520. |
| [13] | Linyan Wang,Huijun Zhang,Hongyu Hu. Effect of Driving Experience on Take-Over Performance of L3 Automatic Driving [J]. Automotive Engineering, 2022, 44(10): 1521-1526. |
| [14] | Xiangteng Xia,Dafang Wang,Jiang Cao,Gang Zhao,Jingming Zhang. Semantic Segmentation Method of On-board Lidar Point Cloud Based on Sparse Convolutional Neural Network [J]. Automotive Engineering, 2022, 44(1): 26-35. |
| [15] | Xiaohui Qin,Zhewen Wang,Tao Pang,Weiqing Shi,Ning Sun,Manjiang Hu. Vehicle Positioning Method Based on Tight Coupling of Vehicle Model in Enclosed Environments [J]. Automotive Engineering, 2021, 43(9): 1328-1335. |