汽车工程 ›› 2021, Vol. 43 ›› Issue (3): 323-329.doi: 10.19562/j.chinasae.qcgc.2021.03.003
张家旭1,2,王晨1,郭崇1( ),滕飞1,李东燃1
),滕飞1,李东燃1
Jiaxu Zhang1,2,Chen Wang1,Chong Guo1(),Fei Teng1,Dongran Li1
摘要:
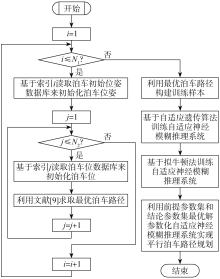
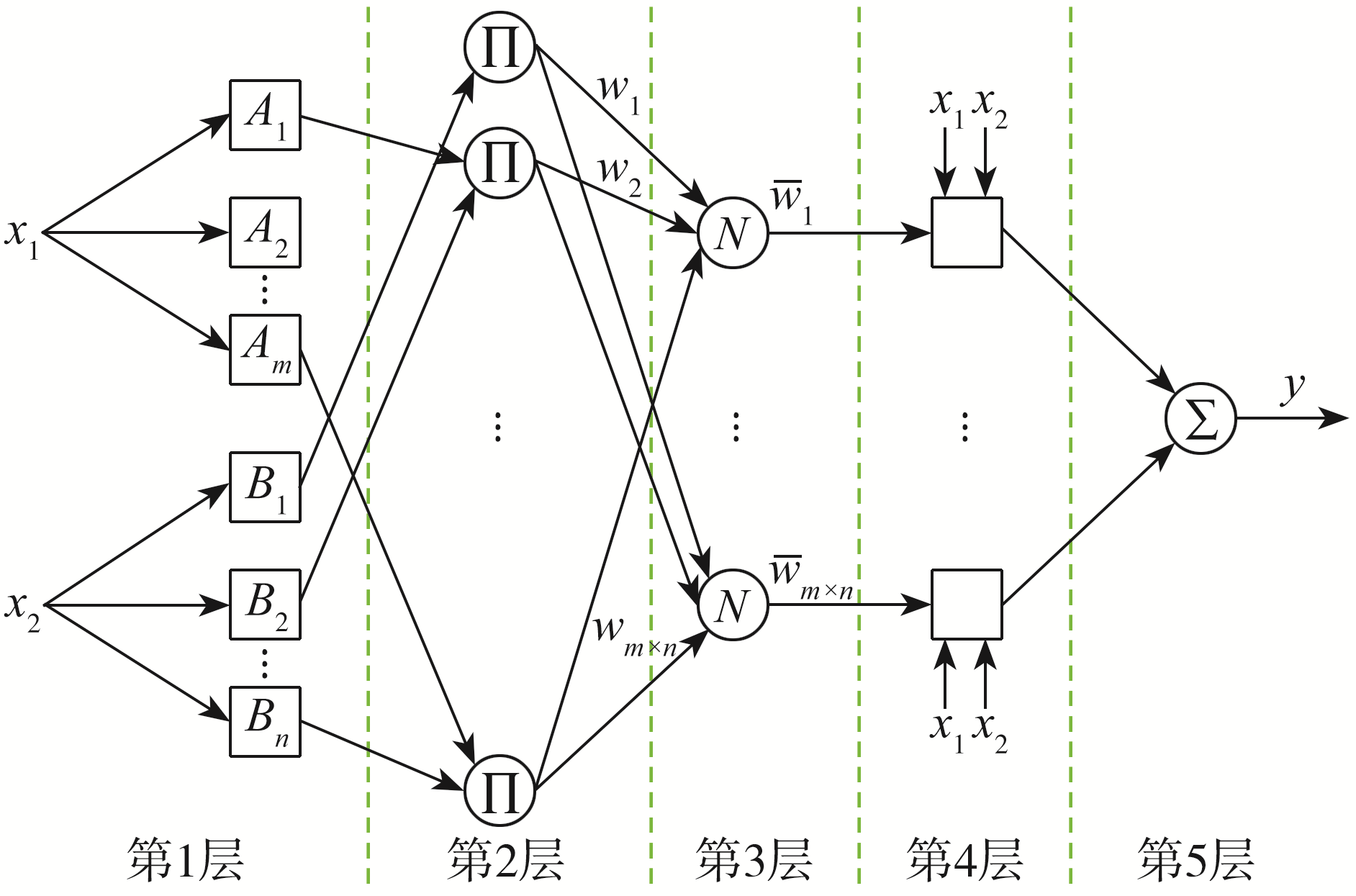
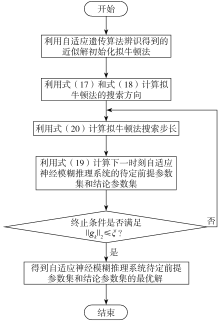
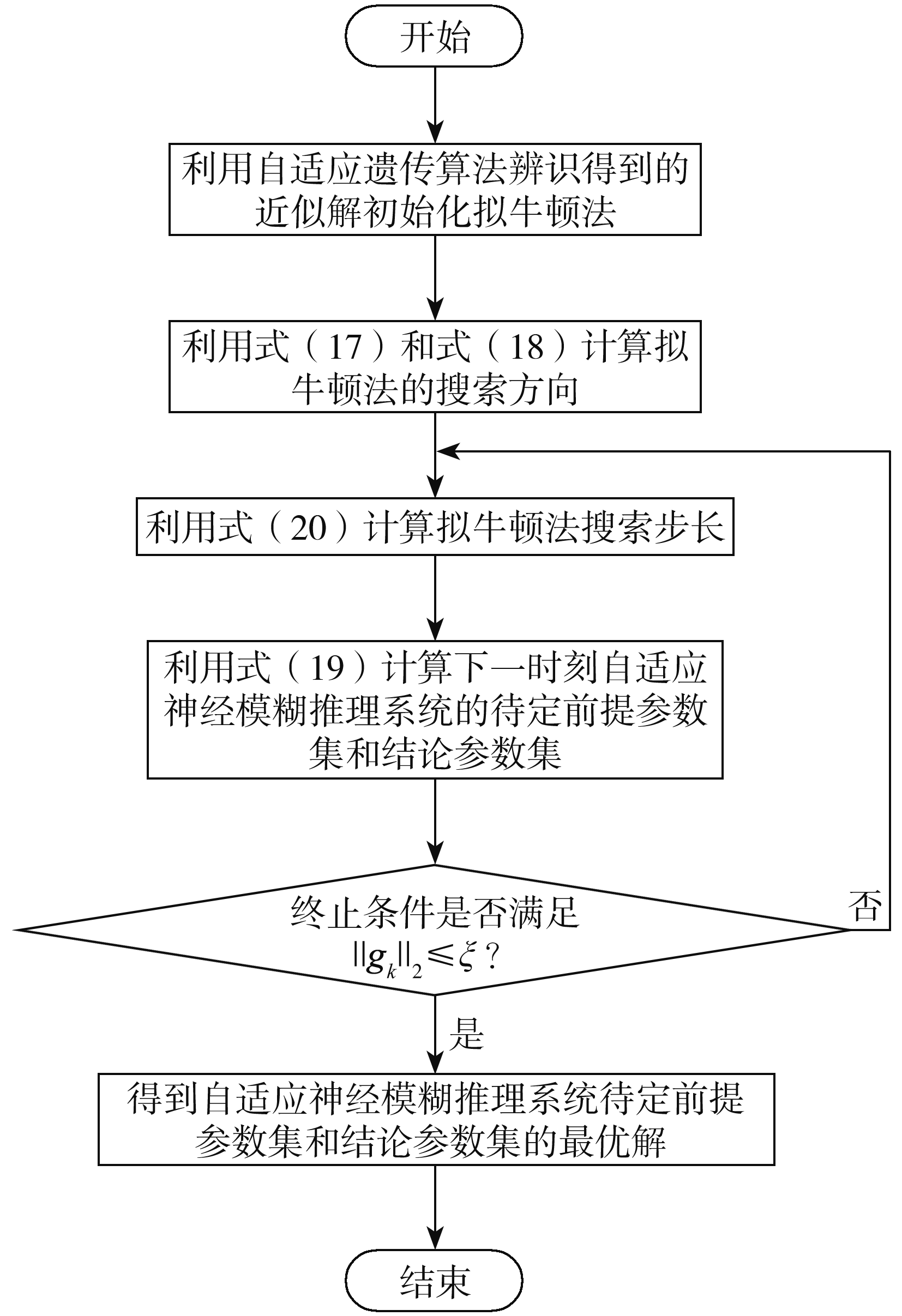
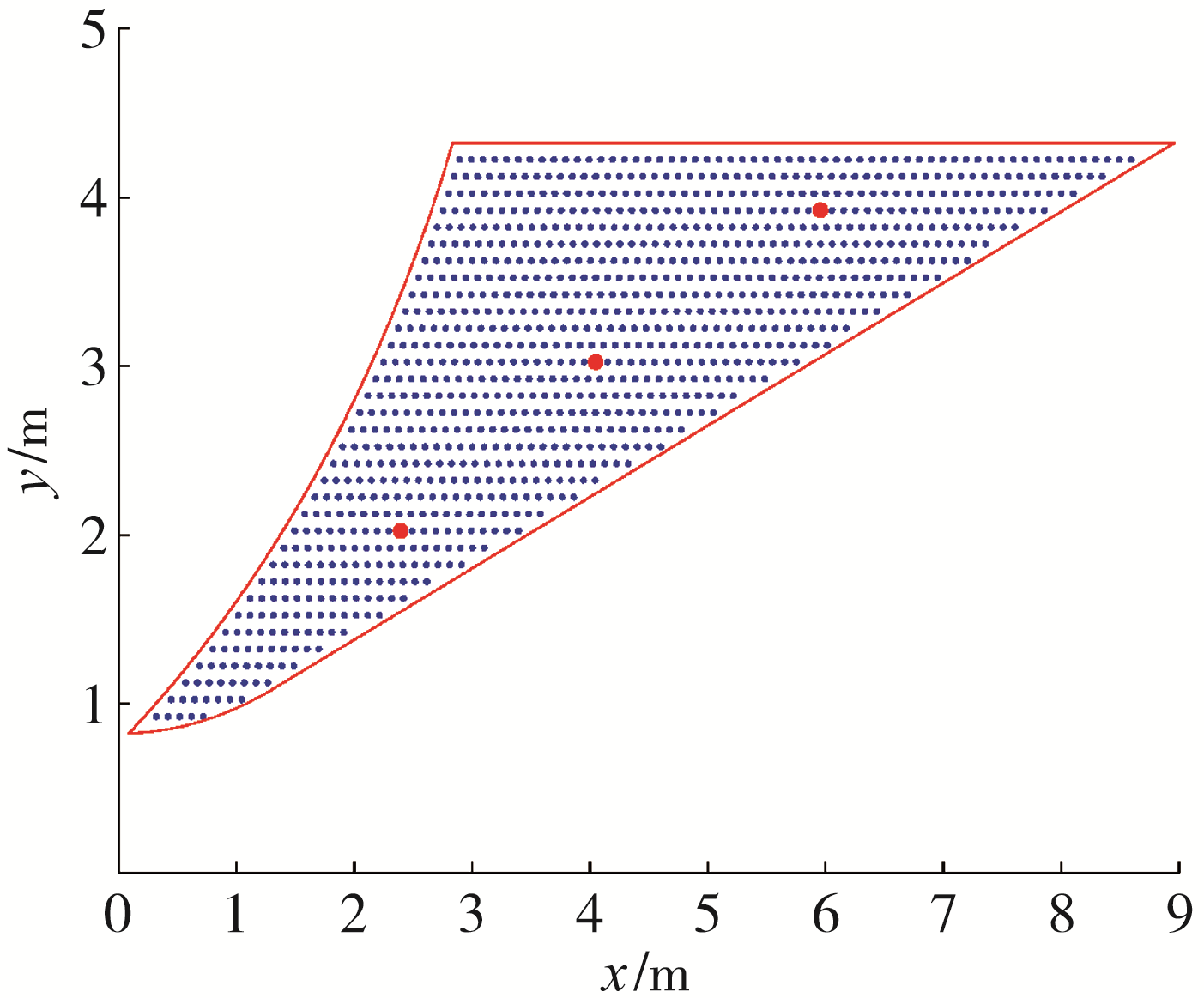
针对常见的平行泊车场景,提出一种基于自适应神经模糊推理系统的平行泊车路径规划方法。以基于优化算法的泊车路径规划方法得出的泊车路径作为训练样本,利用Python脚本语言建立以自适应遗传算法和拟牛顿法为内核的自动化训练框架,使自动训练后的自适应神经模糊推理系统既可继承基于优化算法的泊车路径规划方法适用范围更广的优势,又有效解决该方法求解过程计算量大的问题。通过仿真分析验证所提出方法的可行性和有效性,结果表明:自动训练后的自适应神经模糊推理系统可依据汽车初始泊车位姿和泊车位信息快速规划出可行的平行泊车路径。