汽车工程 ›› 2021, Vol. 43 ›› Issue (6): 833-841.doi: 10.19562/j.chinasae.qcgc.2021.06.006
张旭东1,徐福康1,邹渊1( ),郭宁远1,张宇2
),郭宁远1,张宇2
Xudong Zhang1,Fukang Xu1,Yuan Zou1(),Ningyuan Guo1,Yu Zhang2
摘要:
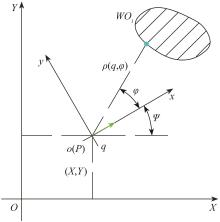
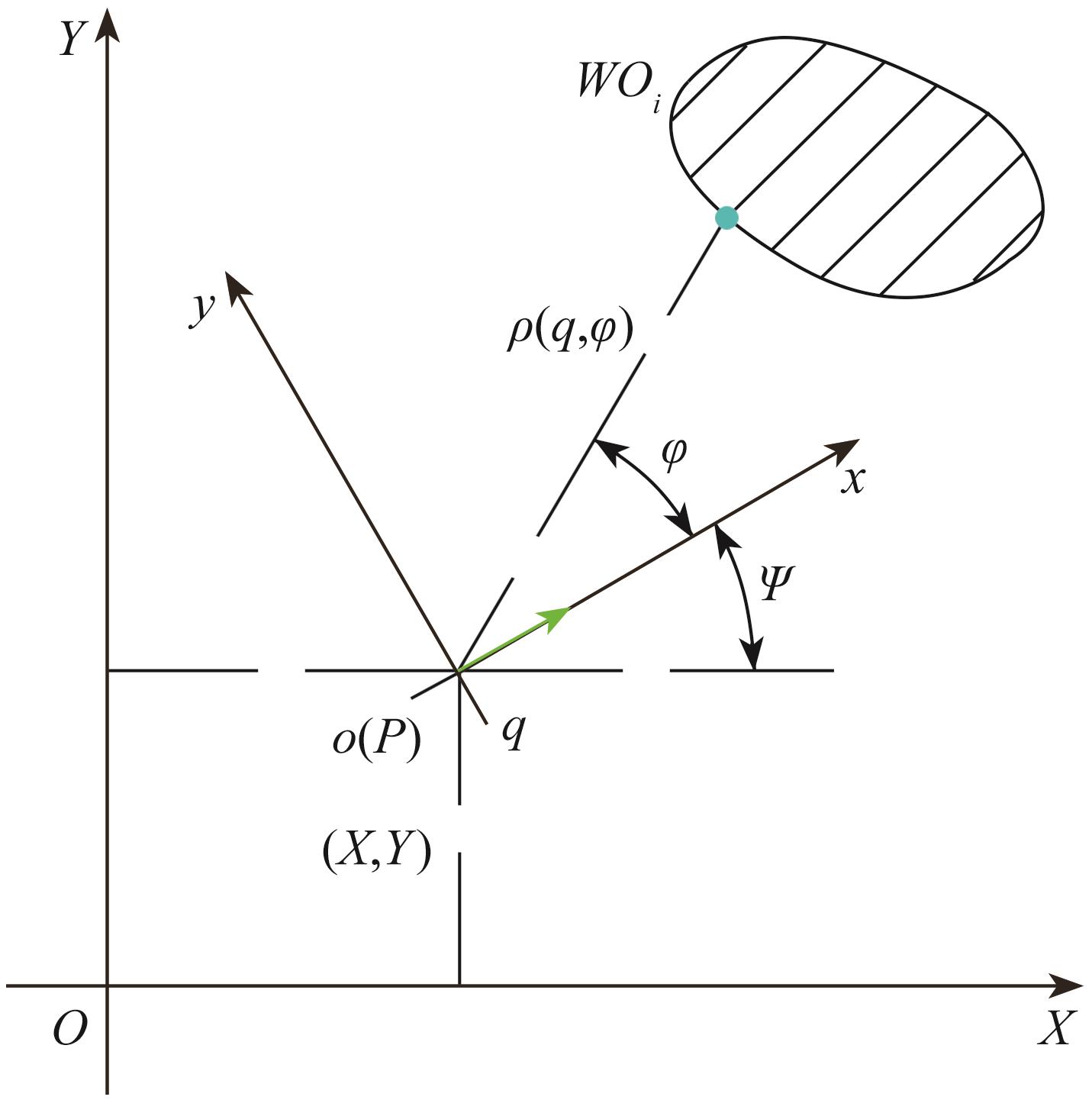
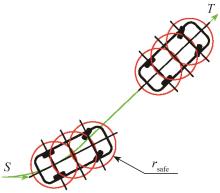
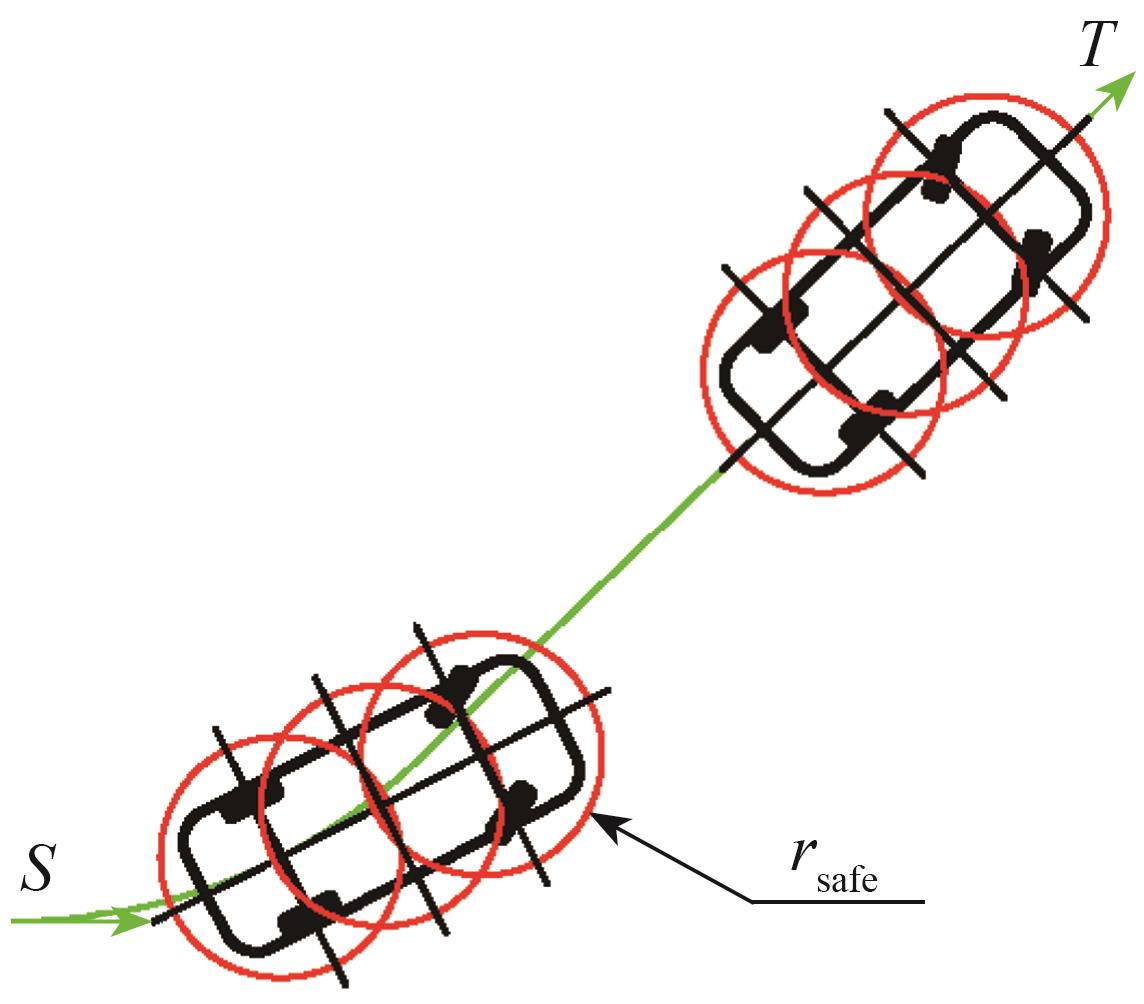
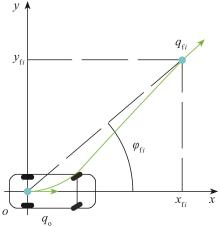
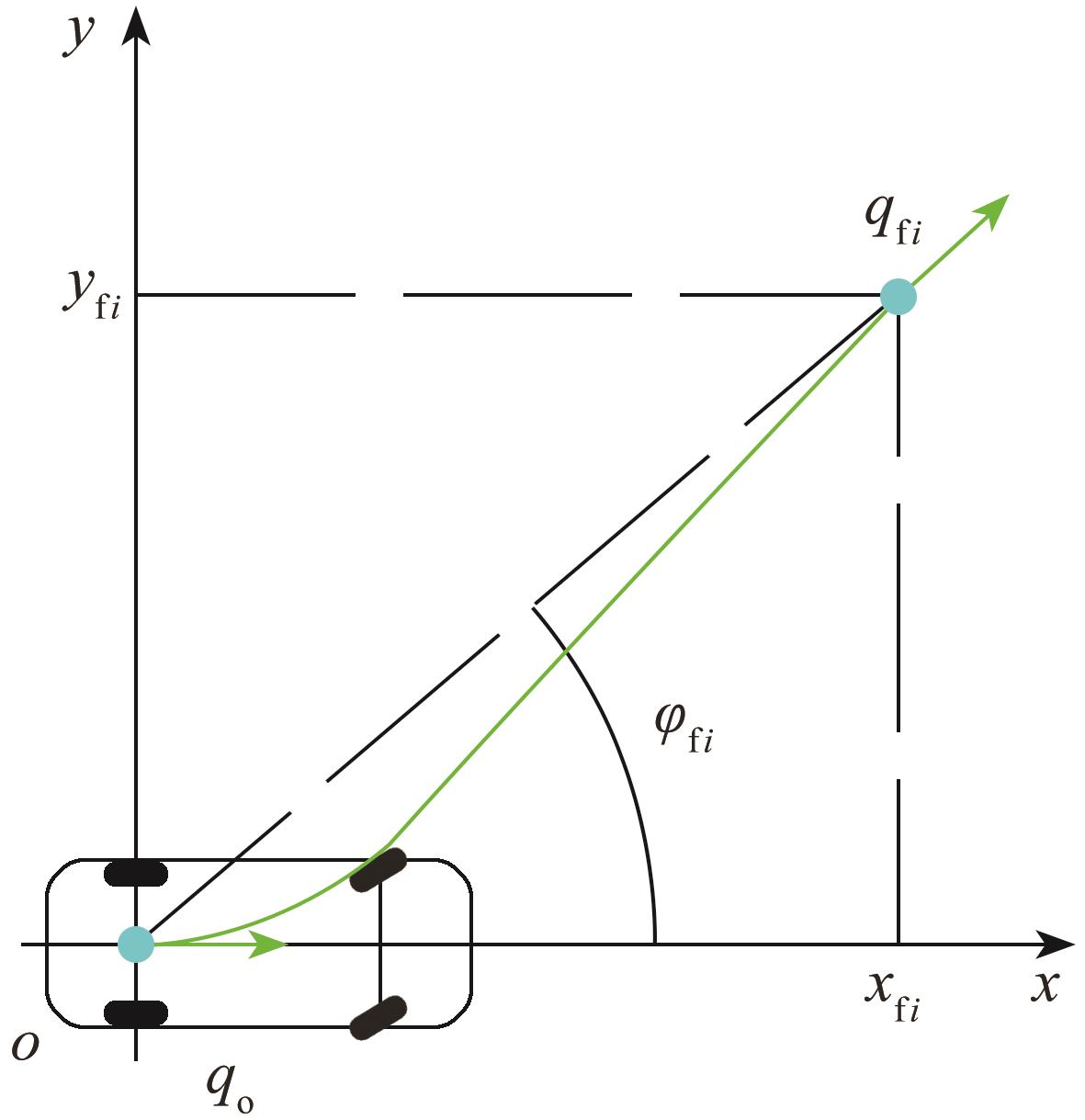
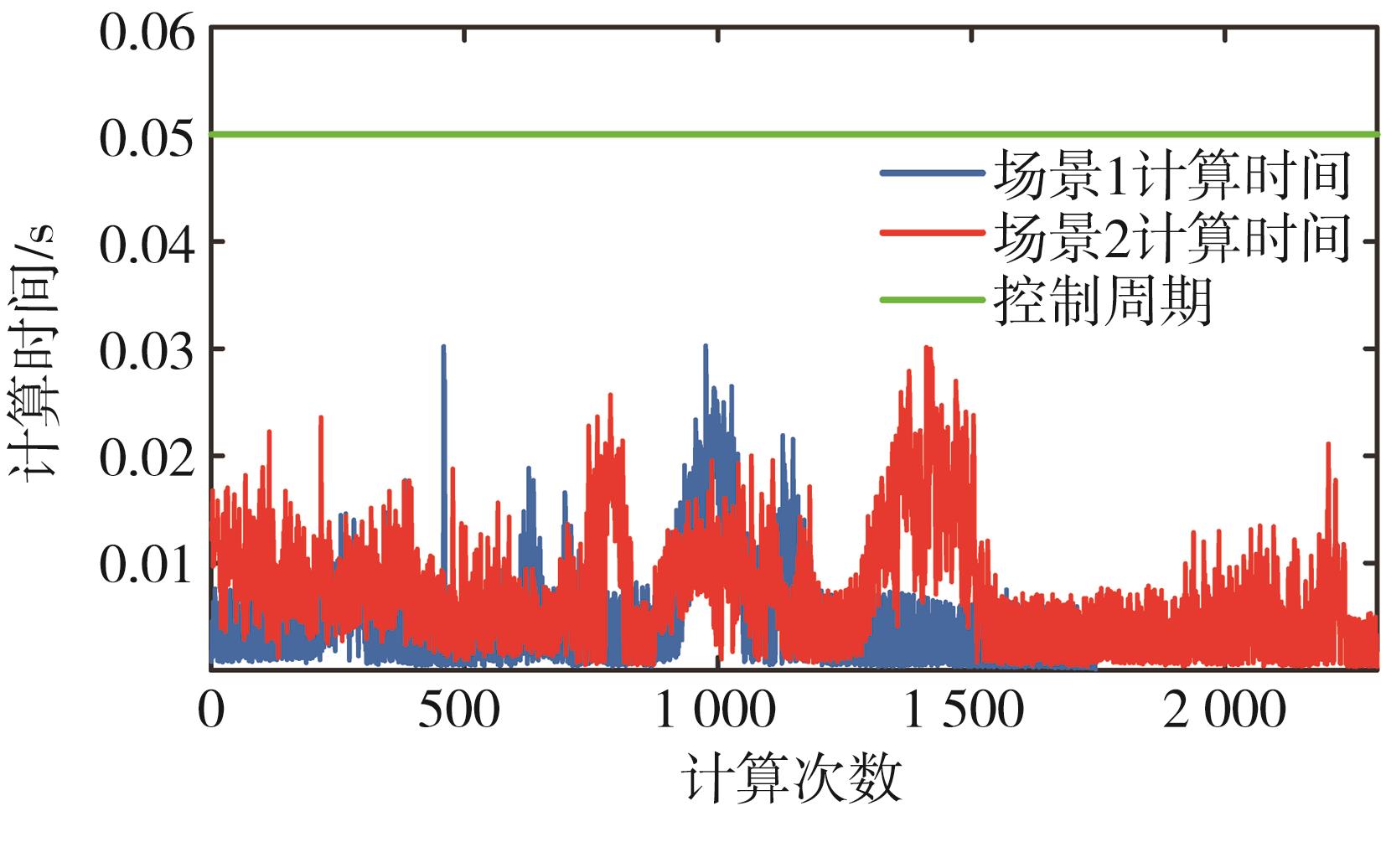
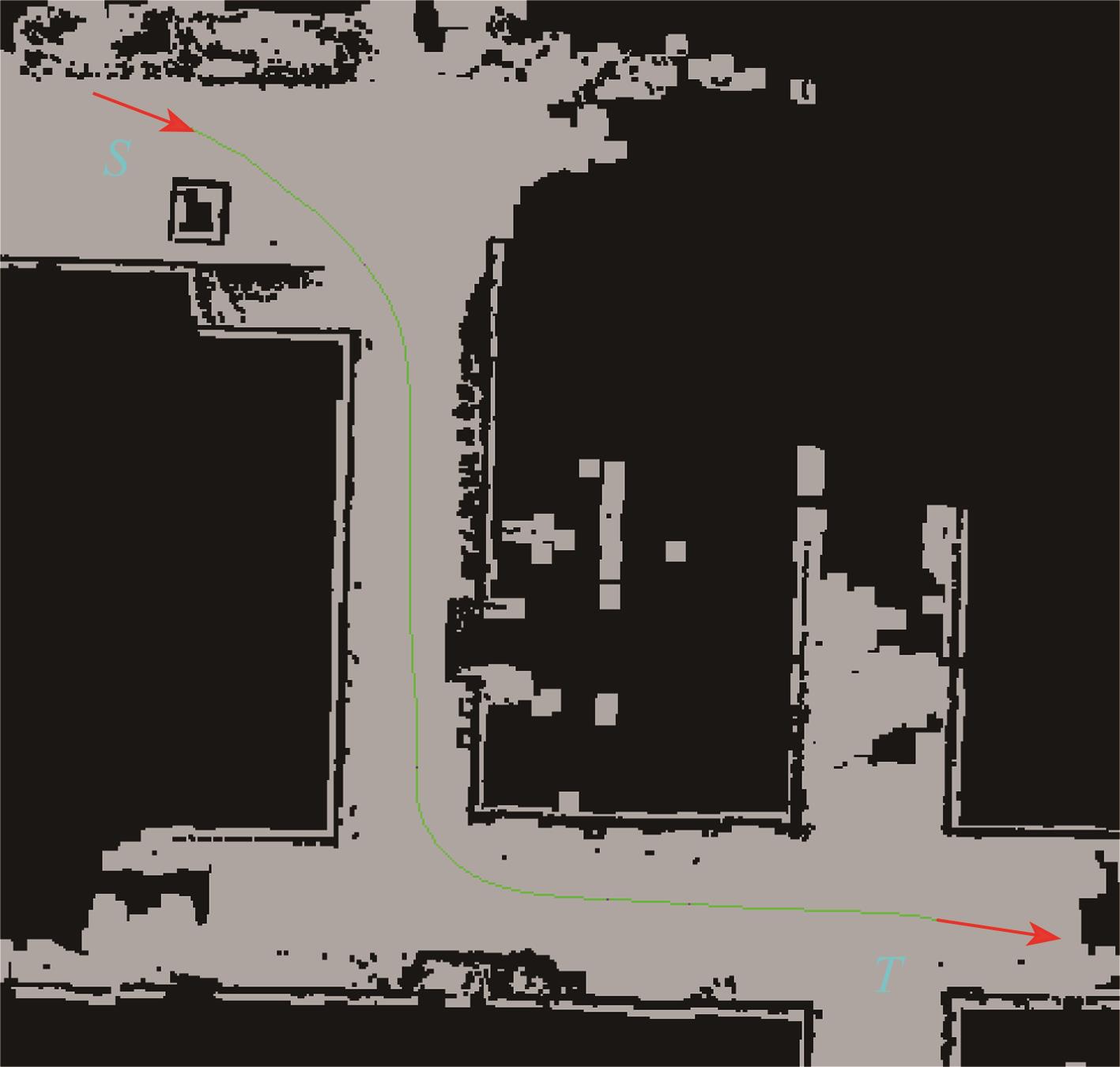
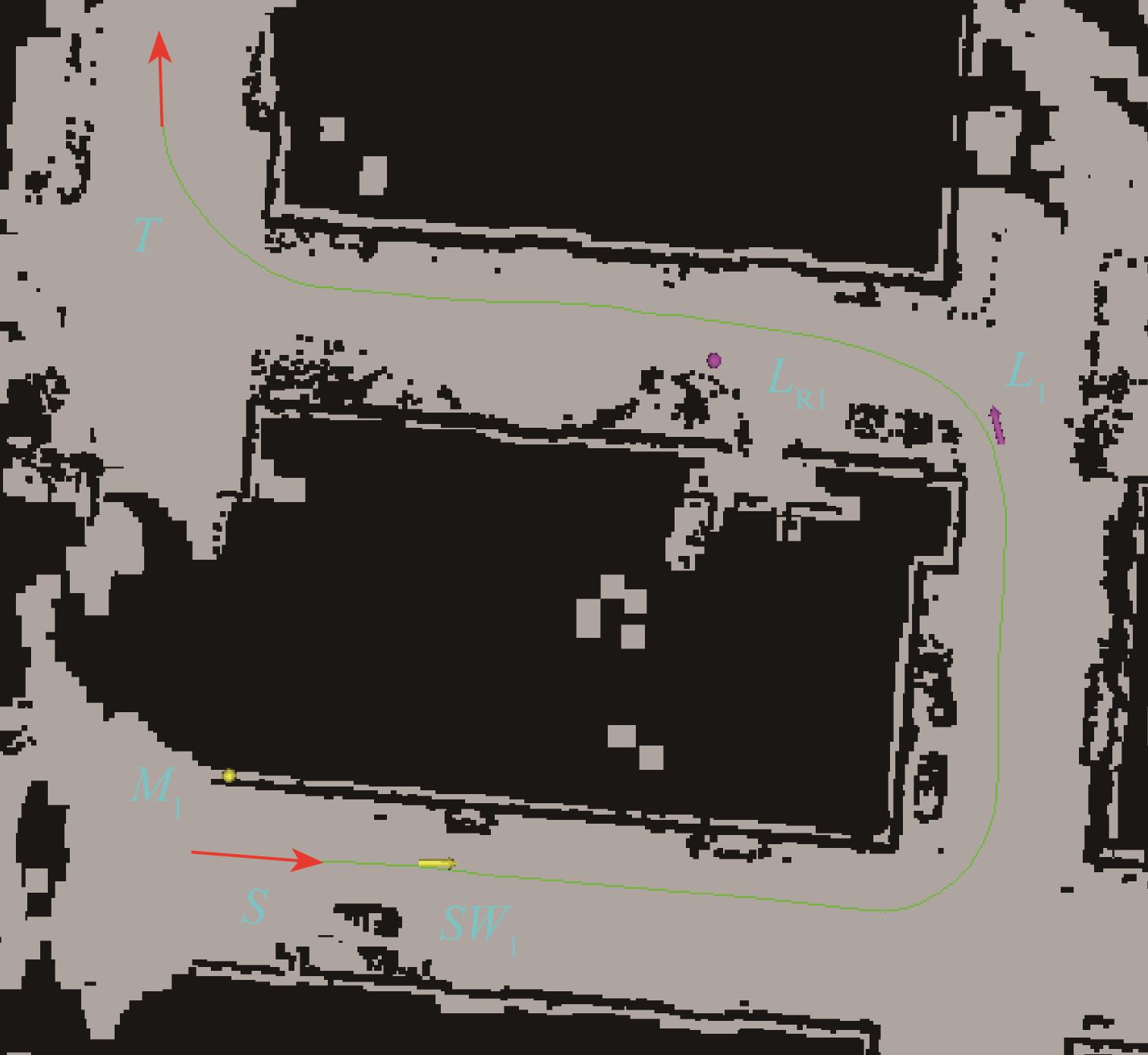
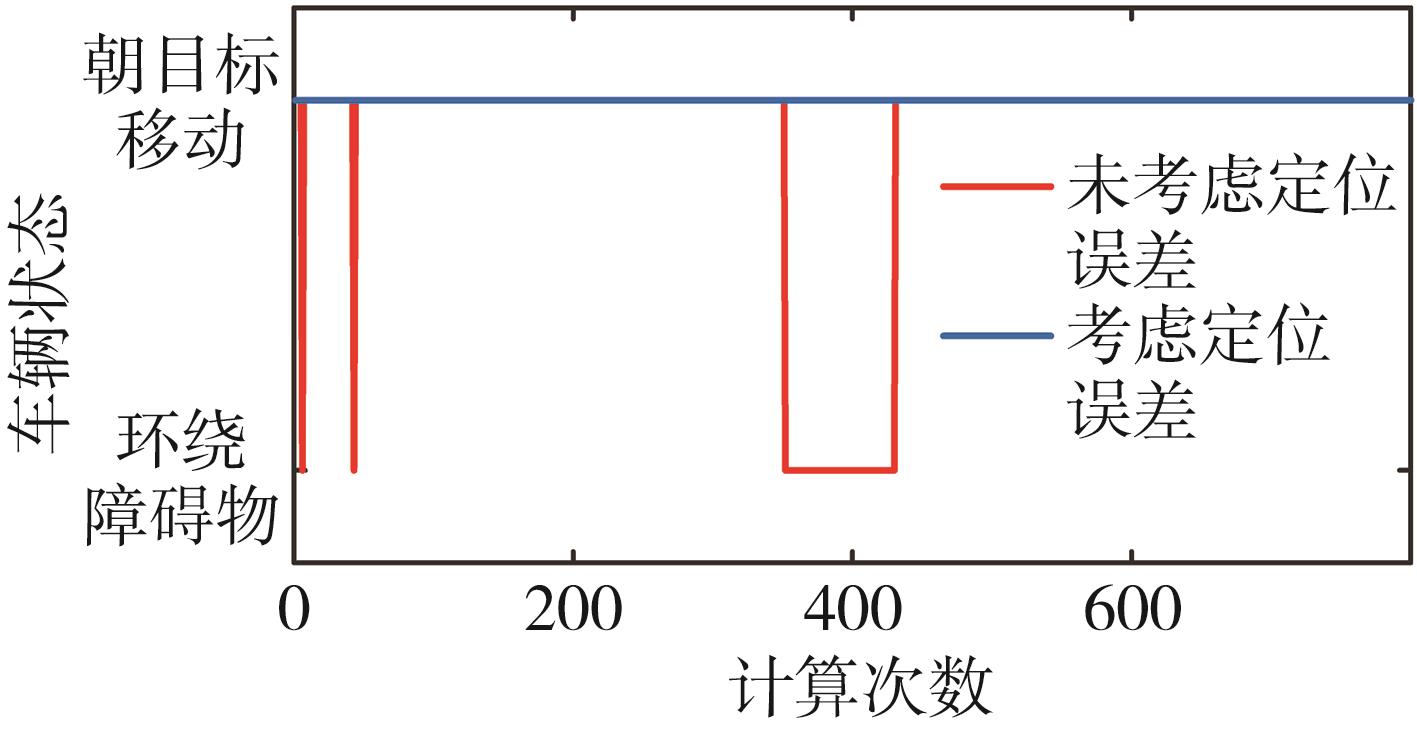
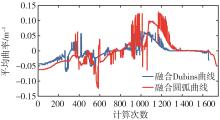
由于环境条件限制,某些采用Ackermann转向的智能轮式车辆仅能获取局部地图和定位信息,给路径规划造成了困难。针对这一问题,本文中提出了一种融合TangentBug和Dubins曲线的局部路径规划算法。首先通过采样的方法构建了规划参考点集合,然后以Dubins曲线作为规划路径,旨在满足车辆最小转向半径的运动约束和目标点处的航向要求,并加入了沿规划路径的碰撞检测和考虑定位误差的状态转换规则。最后通过实车实验证明:本文算法能使车辆按规定位姿到达目标点,并可保证规划路径的安全性和实时性;本文算法可有效避免定位误差对车辆状态的影响;相对于使用圆弧曲线,本文算法规划出的路径更有利于路径跟随控制。