汽车工程 ›› 2022, Vol. 44 ›› Issue (5): 649-655.doi: 10.19562/j.chinasae.qcgc.2022.05.001
所属专题: 智能网联汽车技术专题-规划&控制2022年
• • 下一篇
李兴坤1,郑旭光1,王国晖1,王玉海2,3( )
)
Xingkun Li1,Xuguang Zheng1,Guohui Wang1,Yuhai Wang2,3()
摘要:
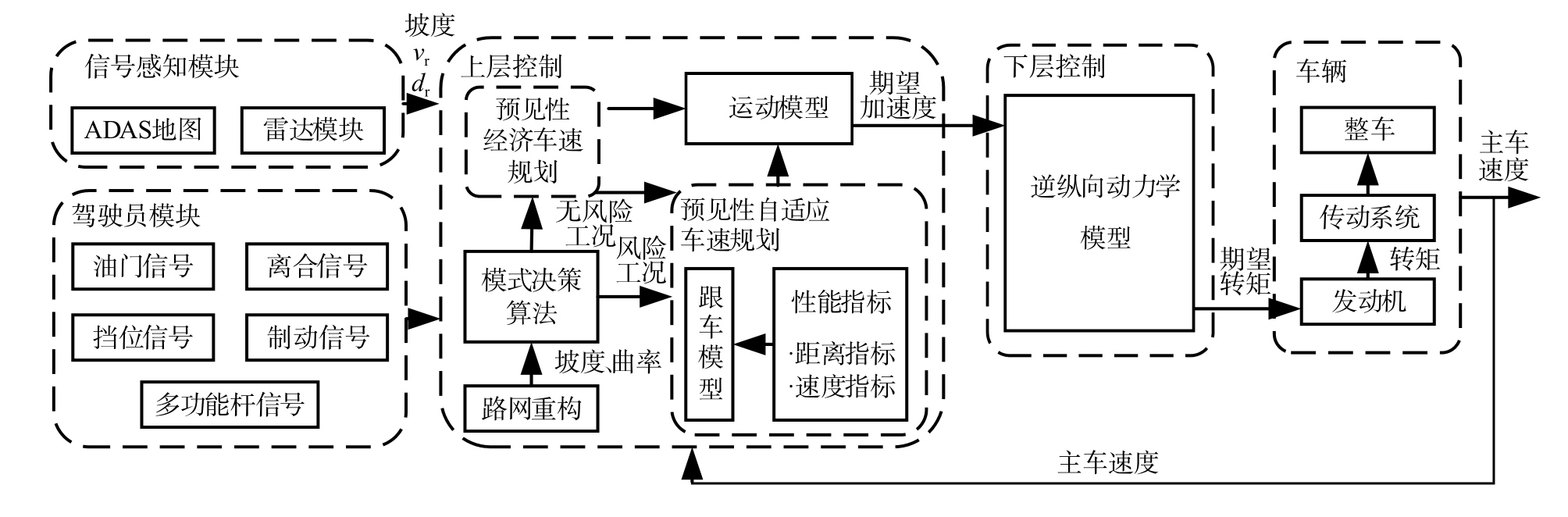
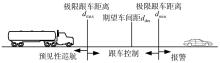
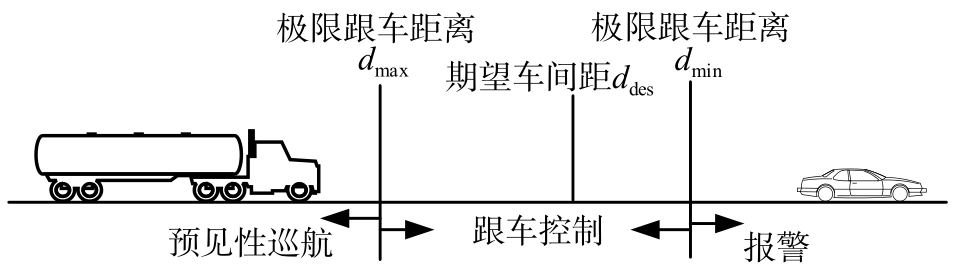
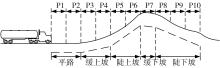
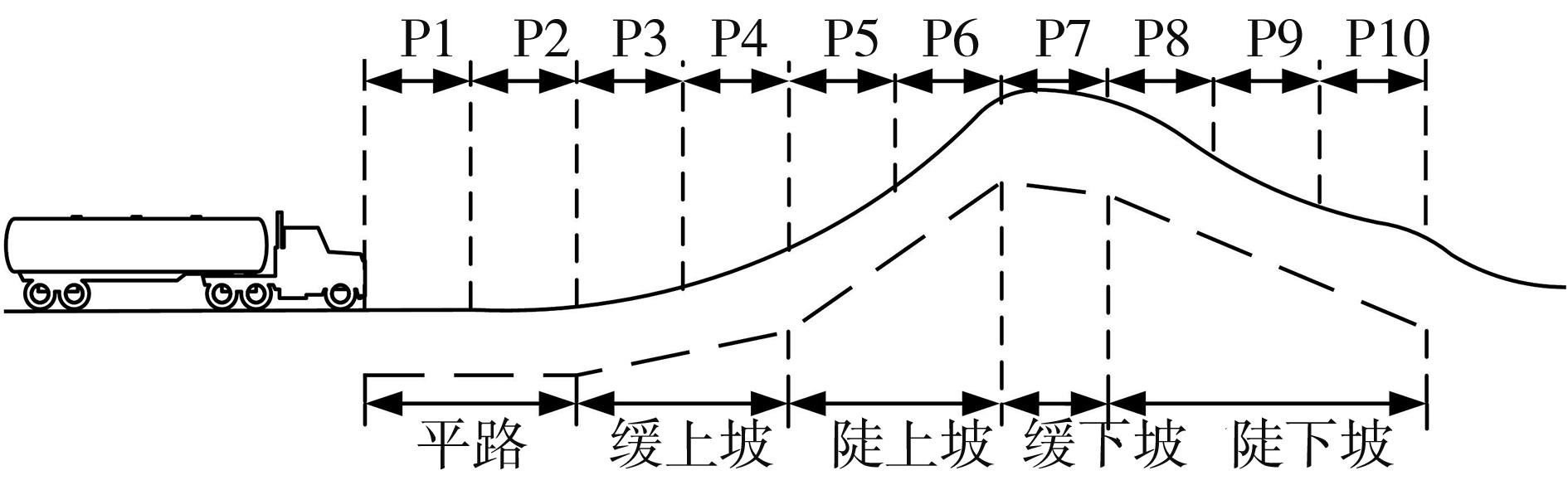
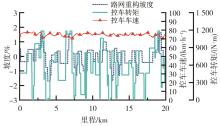
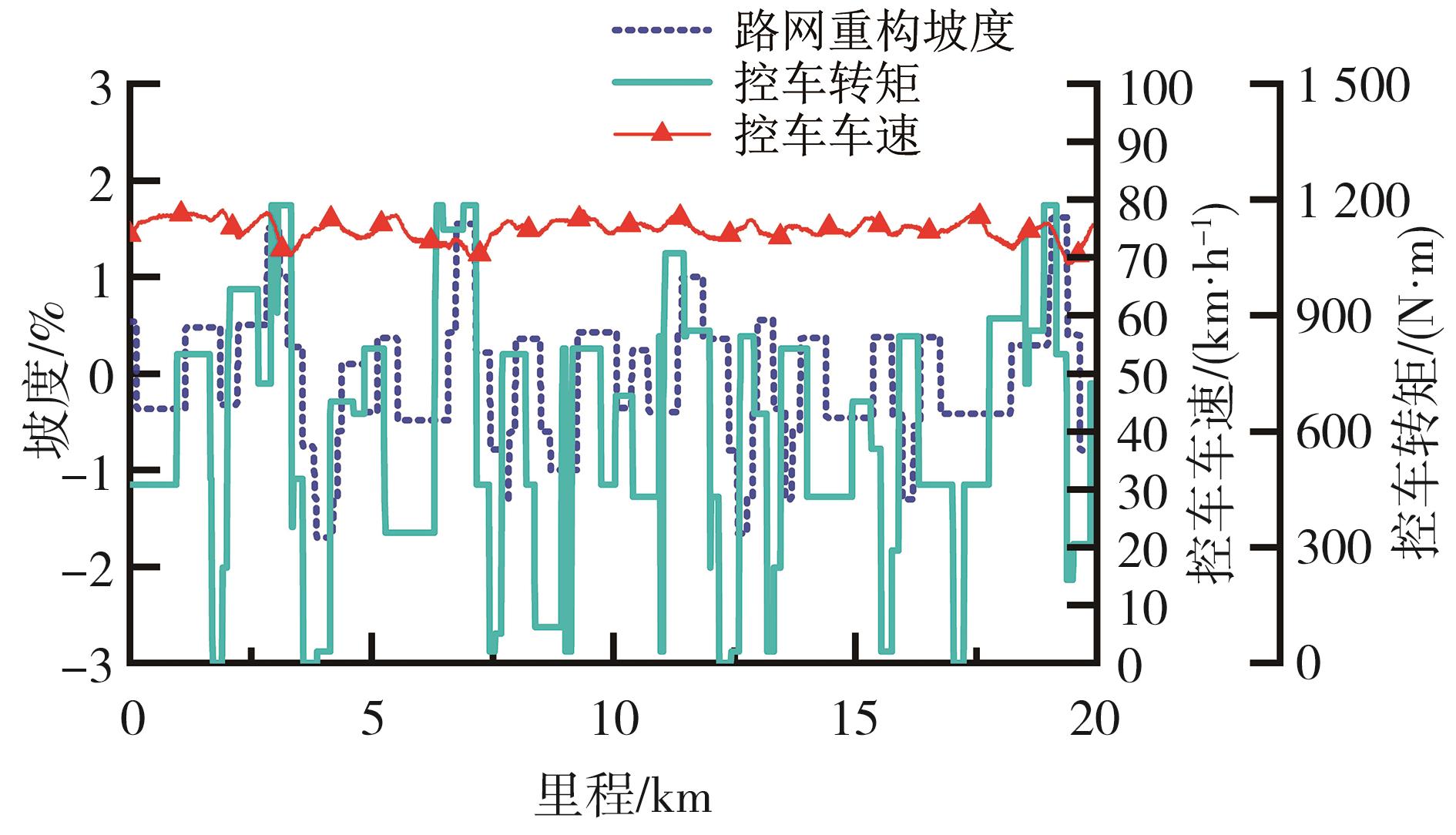
为提高商用车巡航系统的经济性与安全性,设计了考虑节油安全驾驶的商用车预见性自适应巡航控制系统(predictive adaptive cruise control system,PACC),基于前方道路坡度规划了预见性巡航经济车速,针对巡航过程中受前车影响产生制动干扰的问题,提出了一种利用前车信息进行优化的预见性自适应巡航控制策略。基于前方道路坡度设计了自适应车间距,规划主车行驶车速,实现了预见性自适应巡航行驶。基于一汽解放JH6重型商用车进行了实车试验,研究结果表明:该算法可以有效降低燃油消耗量并缓解驾驶员驾驶疲劳,为商用车辅助驾驶系统的开发提供了极为重要的理论及实际价值。