汽车工程 ›› 2022, Vol. 44 ›› Issue (9): 1400-1409.doi: 10.19562/j.chinasae.qcgc.2022.09.011
所属专题: 新能源汽车技术-电驱动&能量管理2022年
张彬,邹渊( ),张旭东,杜国栋,孙文景,孙巍
),张旭东,杜国栋,孙文景,孙巍
Bin Zhang,Yuan Zou(),Xudong Zhang,Guodong Du,Wenjing Sun,Wei Sun
摘要:
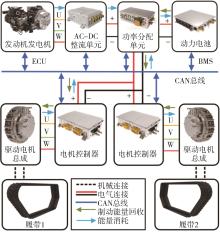
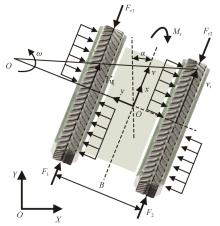
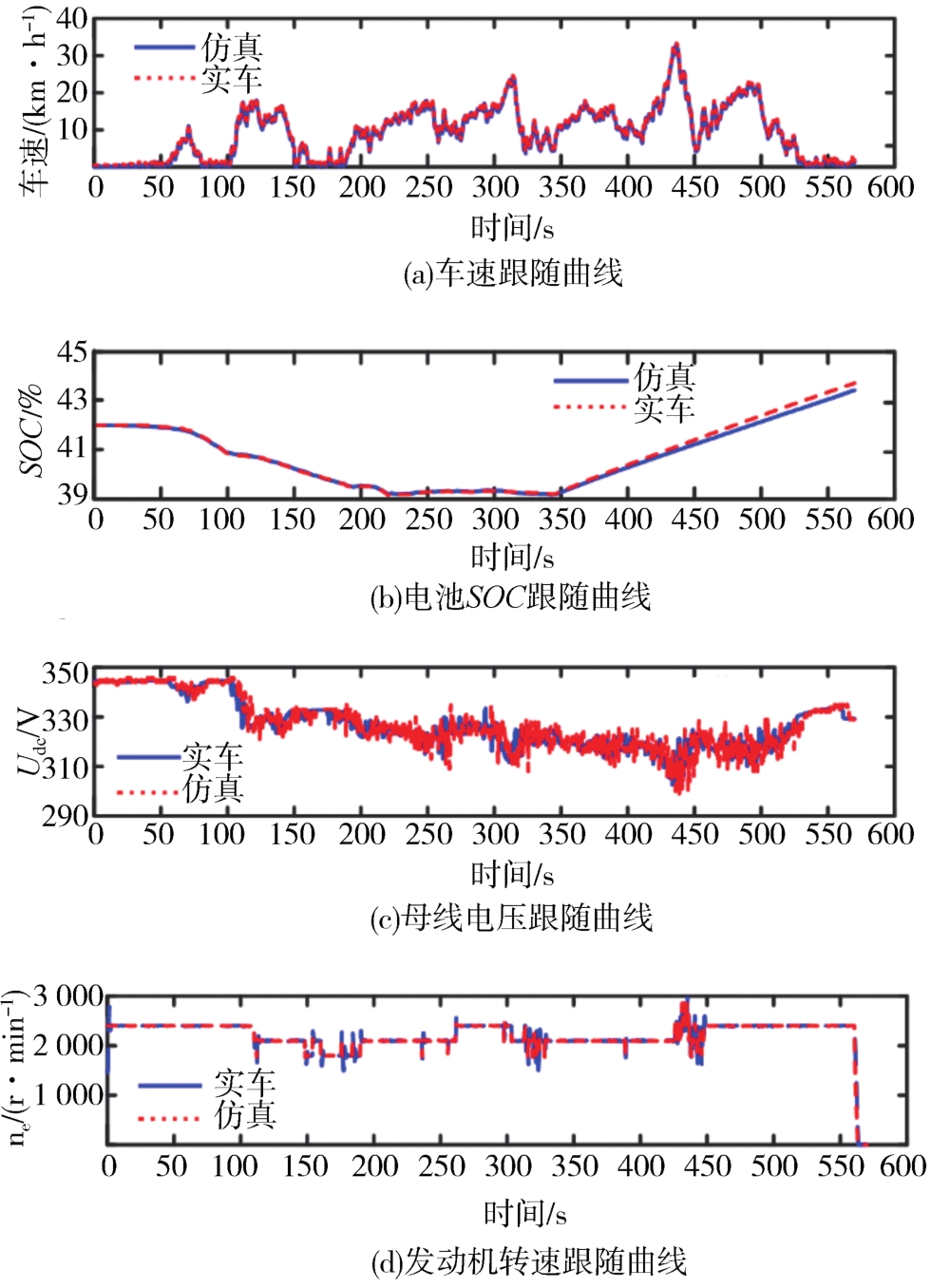
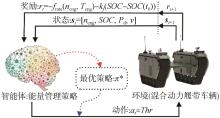
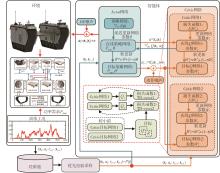
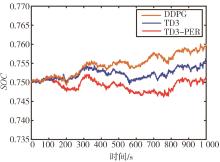
为优化串联式混合动力履带车辆(SHETV)的燃油经济性和动力电池性能,提出一种基于优先经验采样的双延迟深度确定性策略梯度(TD3-PER)能量管理策略。TD3算法能实现更精准的连续控制和防止训练陷入过优估计。优先经验采样(PER)算法可加速策略的训练和获得更高的优化性能。在建立包括纵横向动力学的车辆模型的基础上,完成基于TD3-PER的能量管理策略的框架构建和仿真验证。结果表明,与深度确定性策略梯度(DDPG)相比,所提出的策略使SHETV的燃油消耗降低了3.89%,燃油经济性达到了作为基准的动态规划算法的95.05%。同时该策略具有较好的电池SOC保持能力和工况适应性。