汽车工程 ›› 2023, Vol. 45 ›› Issue (2): 263-272.doi: 10.19562/j.chinasae.qcgc.2023.02.011
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
武志斐( ),李守彪
),李守彪
收稿日期:2022-07-20
修回日期:2022-08-31
出版日期:2023-02-25
发布日期:2023-02-21
通讯作者:
武志斐
E-mail:wuzhifei@tyut.edu.cn
基金资助:
Zhifei Wu(),Shoubiao Li
Received:2022-07-20
Revised:2022-08-31
Online:2023-02-25
Published:2023-02-21
Contact:
Zhifei Wu
E-mail:wuzhifei@tyut.edu.cn
摘要:
为实现在自动驾驶复杂场景下检测数量变化的车道线,提出一种基于实例分割的车道线检测算法。首先以ResNet18网络作为主干网络提取图像特征,采用特征金字塔网络进行特征融合。同时设计一种扩张卷积残差模块来提高检测的精度;然后基于车道线的位置进行实例分割,利用语义分割出的车道线点位置预测对应的聚类点位置,通过对聚类点采用DBSCAN聚类算法实现车道线实例区分。结果表明,该算法能够在复杂的自动驾驶场景下有效地进行多车道线检测,在CULane数据集和TuSimple数据集上的调和平均值分别达到75.2%和97.0%。
武志斐,李守彪. 基于实例分割的车道线检测算法[J]. 汽车工程, 2023, 45(2): 263-272.
Zhifei Wu,Shoubiao Li. Lane Detection Algorithm Based on Instance Segmentation[J]. Automotive Engineering, 2023, 45(2): 263-272.
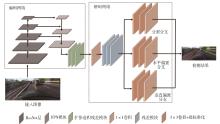
图1
车道线检测网络整体结构"
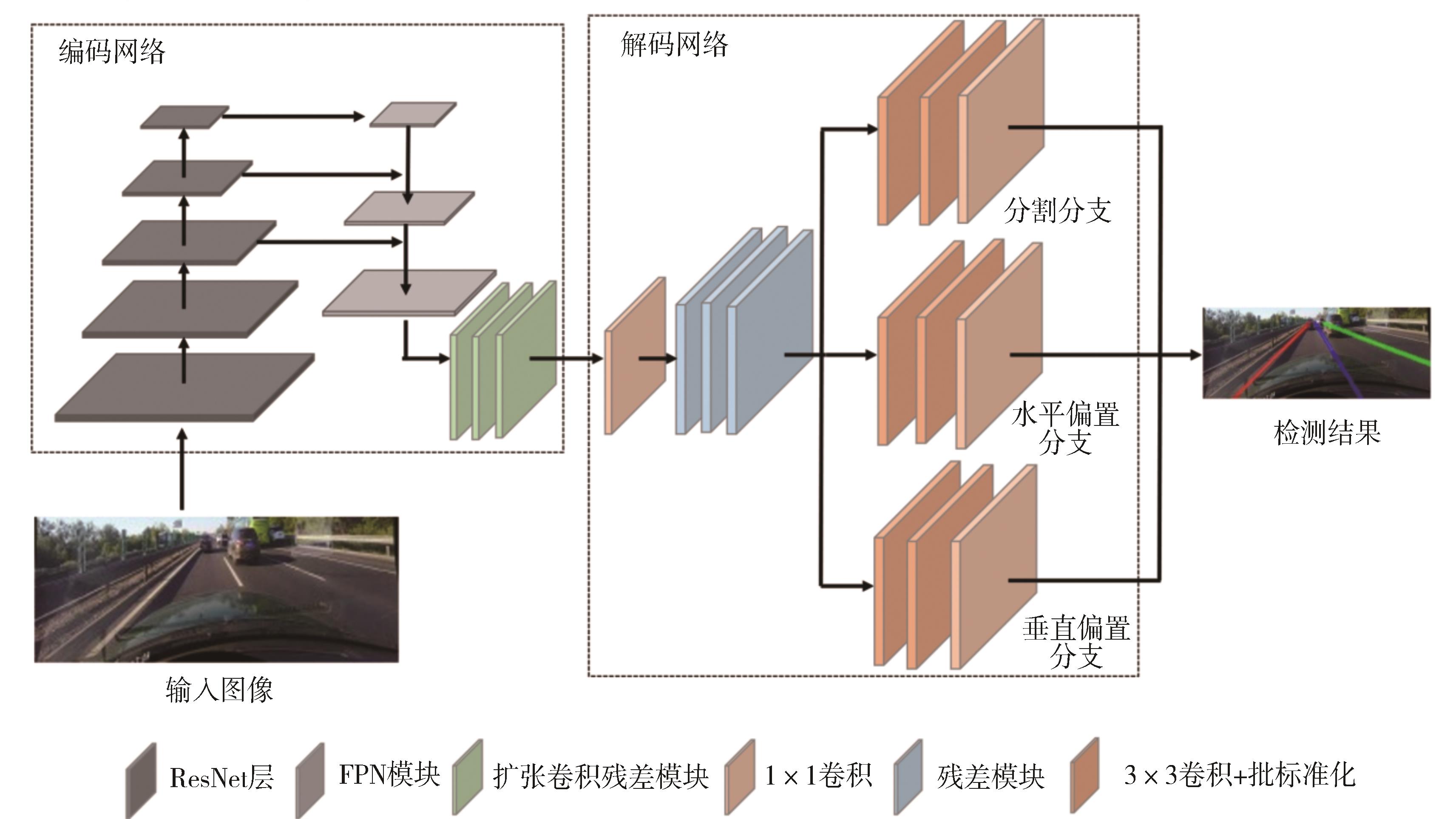
表1
ResNet18网络结构"
| 层名 | 输出特征尺寸 | ResNet18 |
|---|---|---|
| L1 | 400×160×32 | 7×7卷积,步长2 |
| L2 | 200×80×64 | 3×3最大池化,步长2 |
| 残差模块×2 | ||
| L3 | 100×40×128 | 残差模块×2 |
| L4 | 50×20×256 | 残差模块×2 |
| L5 | 25×10×512 | 残差模块×2 |
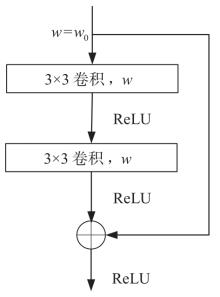
图2
残差模块"
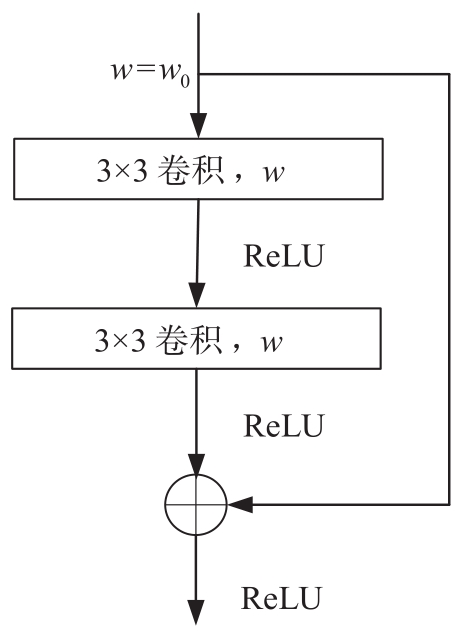
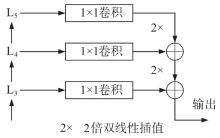
图3
特征金字塔结构"
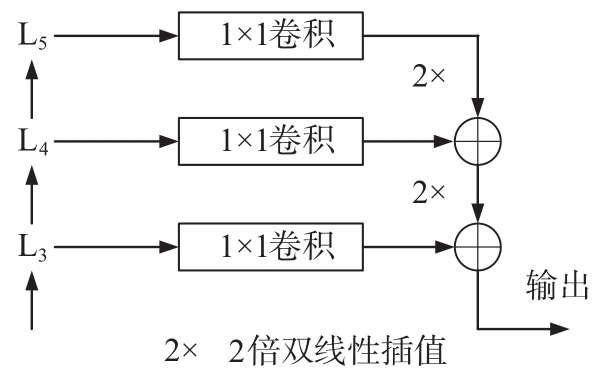
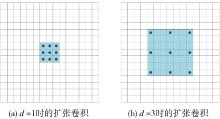
图4
不同扩张率的扩张卷积"
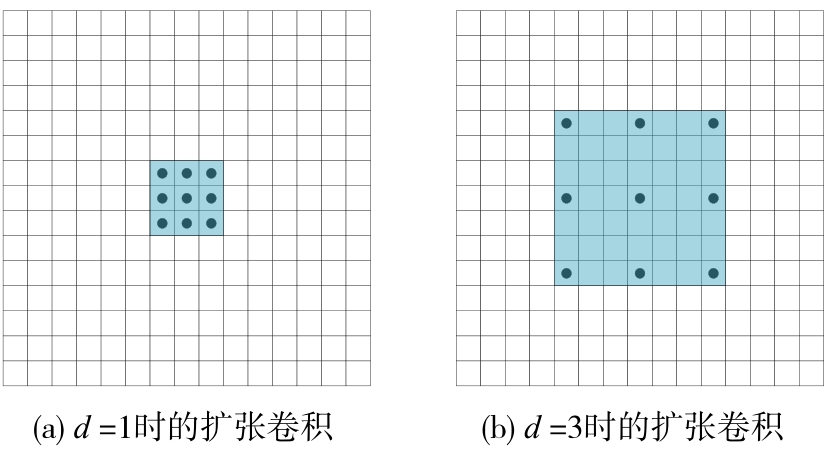
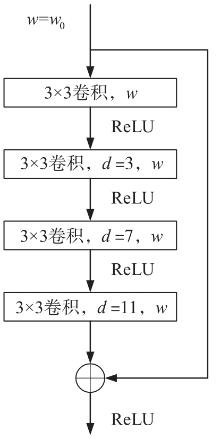
图5
扩张卷积残差模块"
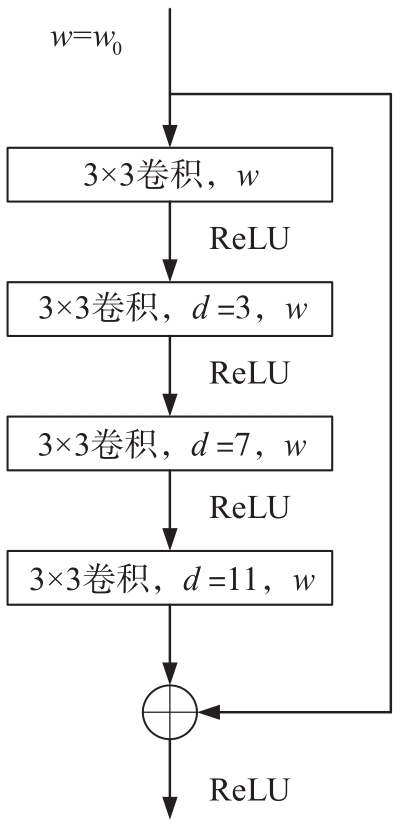

图6
车道线点分布示意图"

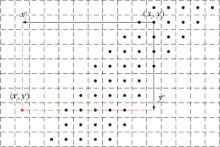
图7
聚类点位置计算原理"
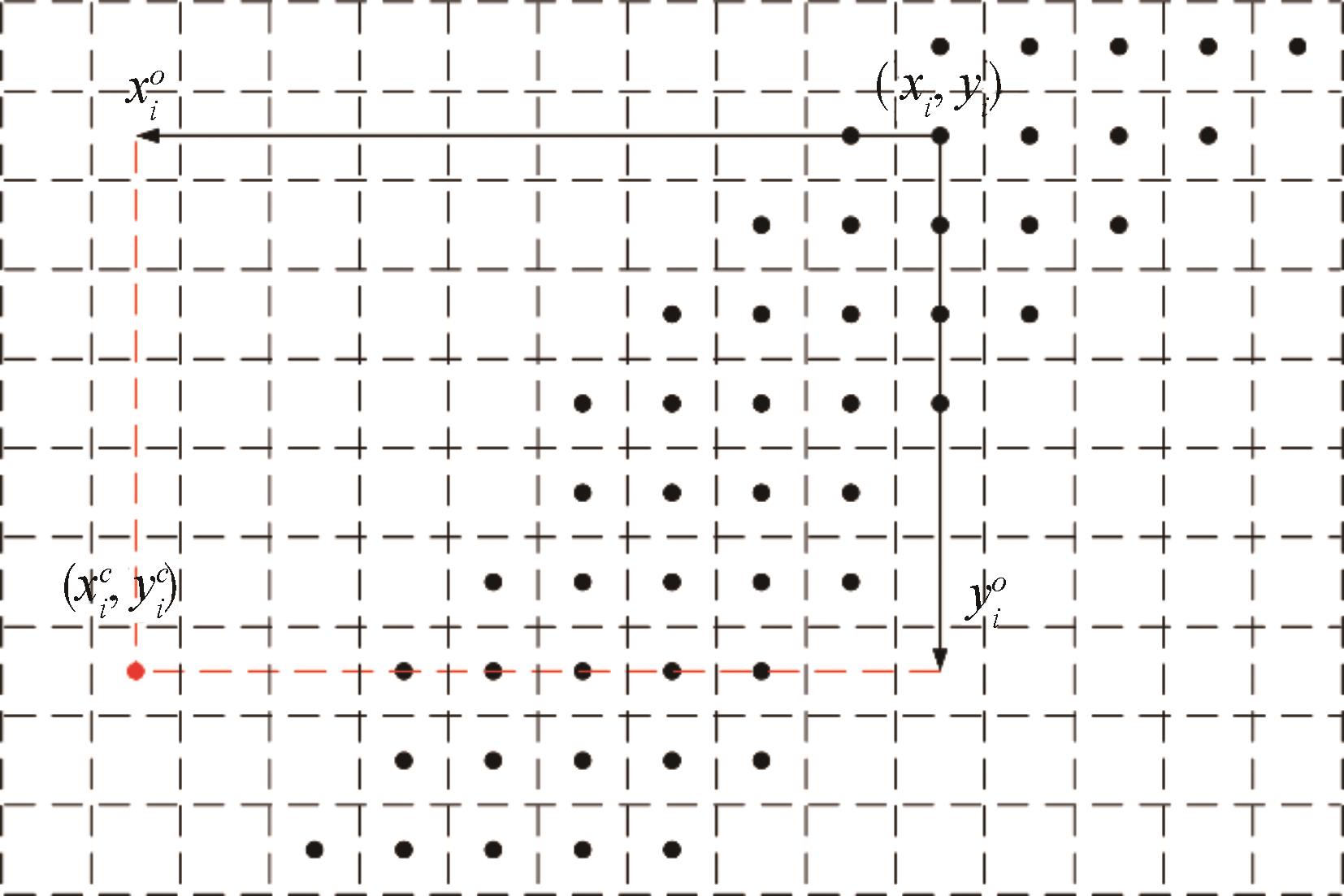

图8
聚类点分布示意图"

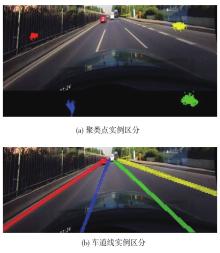
图9
实例区分结果"
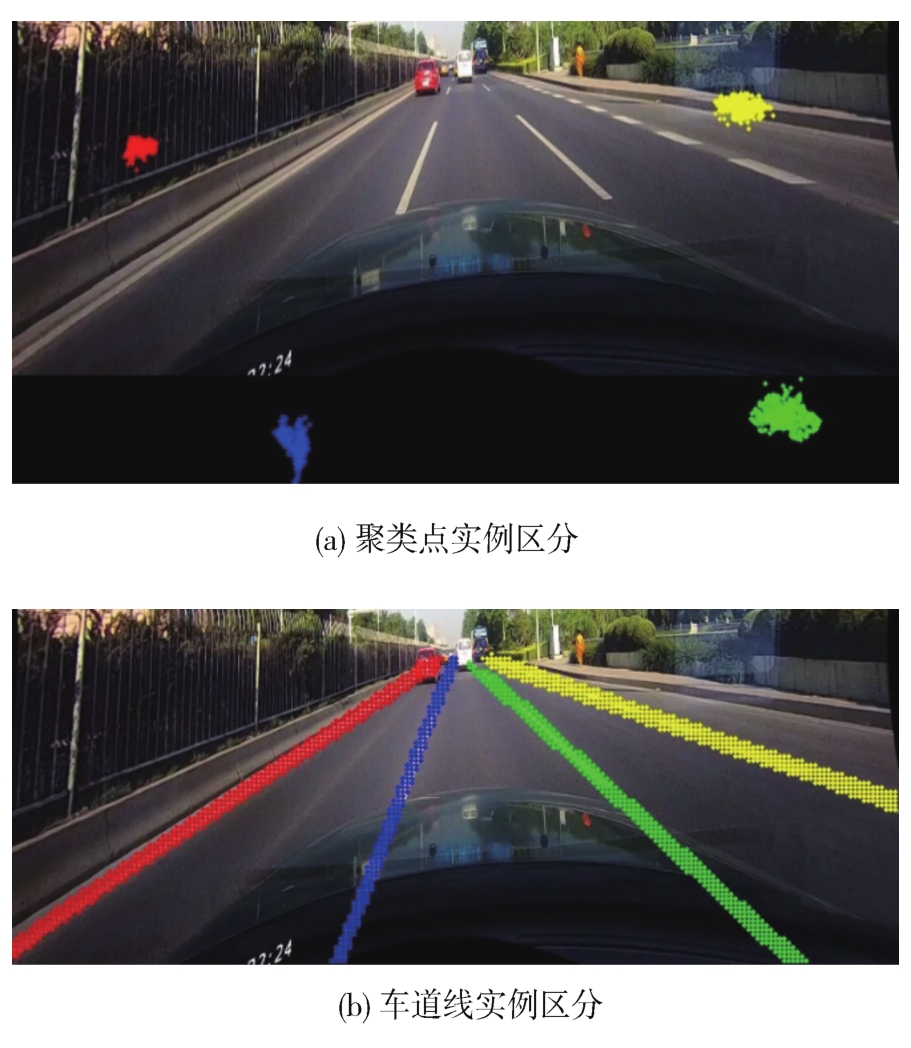
表2
车道线数据集"
| 数据集 | 总帧数 | 训练集 | 验证集 | 测试集 | 分辨率 |
|---|---|---|---|---|---|
| CULane | 133 325 | 88 880 | 9 675 | 34 680 | 1640×590 |
| TuSimple | 6 408 | 3 268 | 358 | 2 782 | 1280×720 |
表3
CULane数据集结果"
| 场景 | SCNN | SAD | UFLD | E2Enet | 本文算法 |
|---|---|---|---|---|---|
| 正常/% | 90.6 | 90.1 | 90.7 | 91.0 | 91.1 |
| 拥挤/% | 69.7 | 68.8 | 70.2 | 73.1 | 72.6 |
| 夜晚/% | 66.1 | 66.0 | 66.7 | 67.9 | 70.5 |
| 无线/% | 43.4 | 41.6 | 44.4 | 46.6 | 50.2 |
| 阴影/% | 66.9 | 65.9 | 69.3 | 74.1 | 75.8 |
| 箭头/% | 84.1 | 84.0 | 85.7 | 85.8 | 88.2 |
| 眩光/% | 58.5 | 60.2 | 59.5 | 64.5 | 67.1 |
| 弯道/% | 64.4 | 65.7 | 69.5 | 71.9 | 69.8 |
| 路口/个 | 1 990 | 1 998 | 2 037 | 2 022 | 1 923 |
| 综合/% | 71.6 | 70.8 | 72.3 | 74.0 | 75.2 |
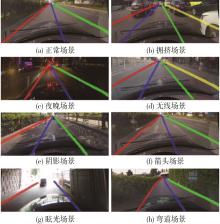
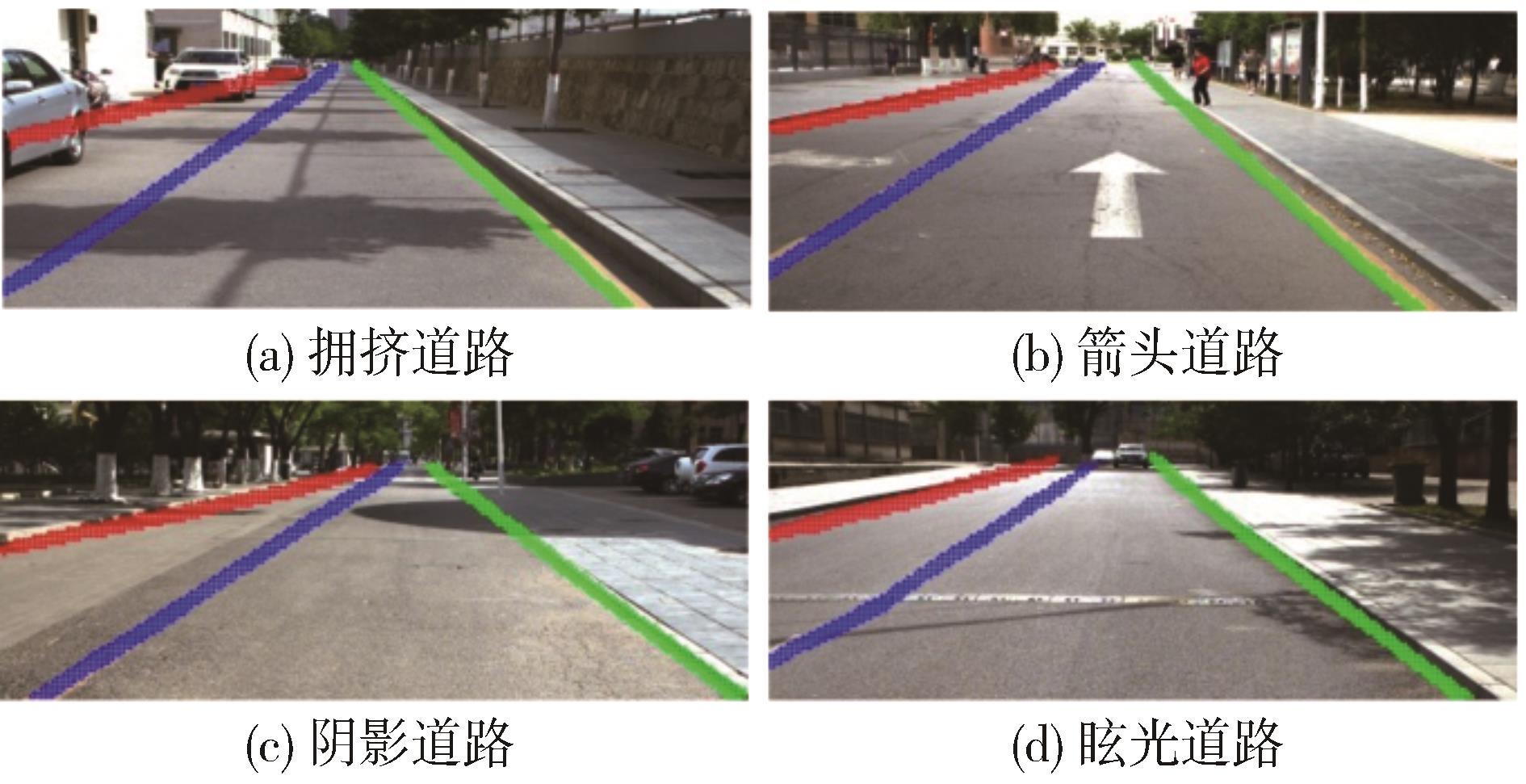
图10
多场景下的车道线检测"
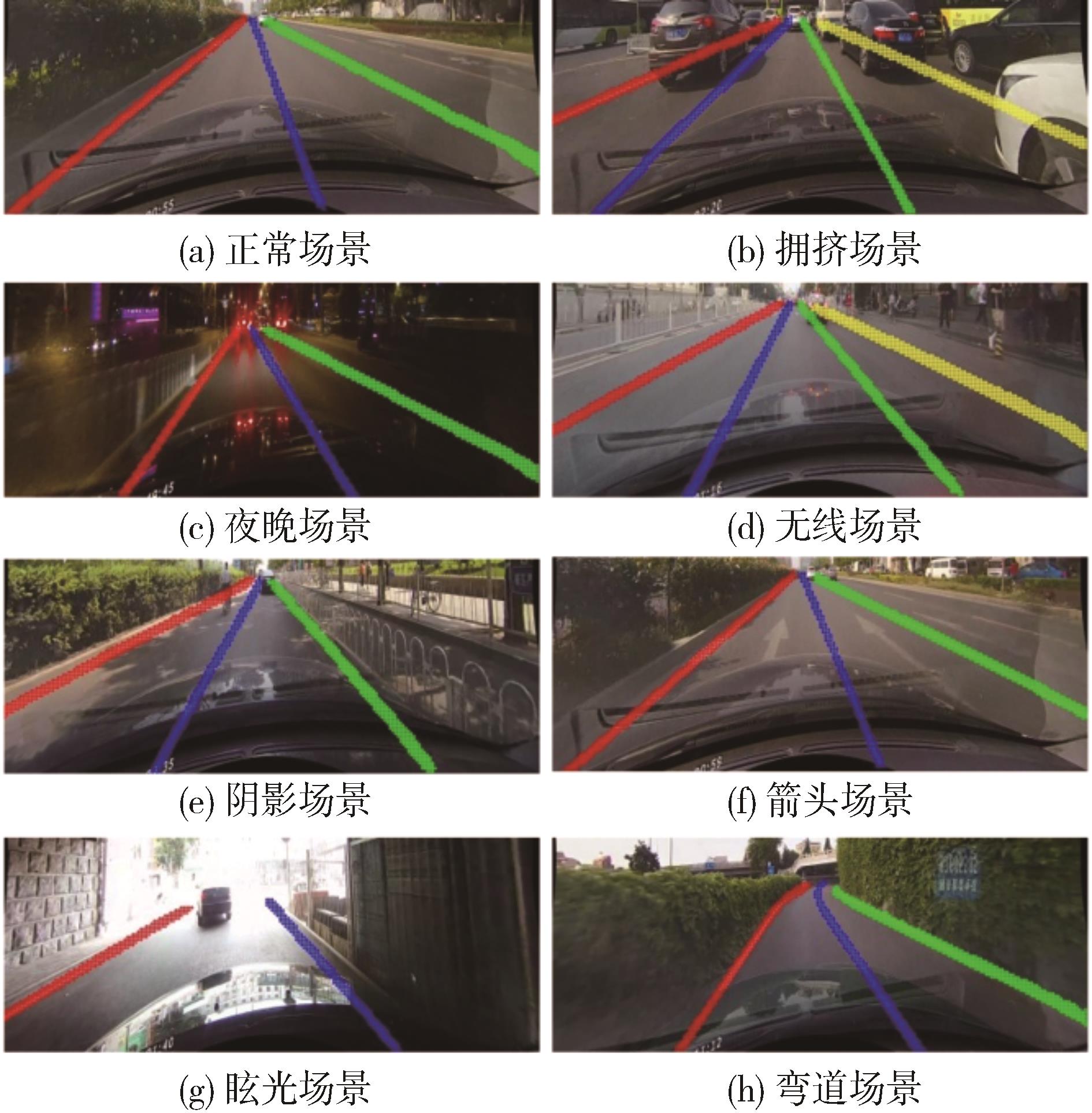
表4
TuSimple数据集结果"
| 方法 | F1 | 准确率 | 假阳率 | 假阴率 |
|---|---|---|---|---|
| SCNN | 96.0 | 96.5 | 6.2 | 1.8 |
| SAD | 95.9 | 96.6 | 6.0 | 2.1 |
| LaneNet | 94.8 | 96.4 | 7.8 | 2.4 |
| UFLD | 88.0 | 95.9 | 18.9 | 3.8 |
| E2ENet | 96.3 | 96.0 | 3.2 | 4.3 |
| PolyLaneNet | 90.6 | 93.4 | 9.4 | 9.3 |
| LSTR | 96.9 | 96.2 | 2.9 | 3.4 |
| 本文算法 | 97.0 | 96.1 | 2.5 | 3.2 |
表5
网络推理与聚类时间"
| 方法 | 时间/ms | 速度/FPS |
|---|---|---|
| 模型推理 | 7.91 | 126.42 |
| DBSCAN聚类 | 7.23 | 138.31 |
| 综合 | 15.14 | 66.05 |
表6
网络性能对比结果 %"
| 模型 | F1 | 精确率 | 召回率 |
|---|---|---|---|
| 不加扩张卷积残差模块 | 74.4 | 77.7 | 71.4 |
| 加扩张卷积残差模块 | 75.2 | 78.0 | 72.6 |
表7
实例分割方法对比 %"
| 实例分割方法 | F1 | 精确率 | 召回率 |
|---|---|---|---|
| 二分类分割+DBSCAN | 40.9 | 39.8 | 42.1 |
| 本文实例分割方法 | 75.2 | 78.0 | 72.6 |
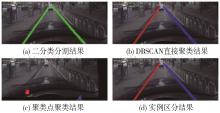
图11
分割车道线远处不连接"
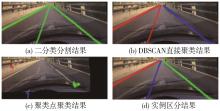
图12
分割车道线远处连接"


图13
实际道路测试车"

图14
实际道路检测结果"
| 1 | 吴一全, 刘莉. 基于视觉的车道线检测方法研究进展[J]. 仪器仪表学报, 2019, 40(12): 92-109. |
| WU Y Q, LIU L. Research and development of the vision-based lane detection methods[J]. Chinese Journal of Scientific Instrument, 2019, 40(12): 92-109. | |
| 2 | LIANG D, GUO Y C, ZHANG S K, et al. Lane detection: a survey with new results[J]. Journal of Computer Science and Technology, 2020, 35(3): 493-505. |
| 3 | SUN T Y, TSAI S J, CHAN V. HSI color model based lane-marking detection[C]. 2006 IEEE Intelligent Transportation Systems Conference. IEEE, 2006: 1168-1172. |
| 4 | 陈涛, 张洪丹, 陈东,等. 基于优先像素与卡尔曼滤波追踪的车道线检测[J]. 汽车工程, 2016, 38(2): 200-205,220. |
| CHEN T, ZHANG H D, CHEN D, et al. Lane detection based on high priority pixels and tracking by Kalman filter[J]. Automotive Engineering, 2016, 38(2): 200-205,220. | |
| 5 | 金智林, 何麟煊, 赵万忠. 用于智能汽车的复杂光照环境车道线检测及跟踪方法[J]. 汽车安全与节能学报, 2019, 10(4): 459-466. |
| JIN Z L, HE L X, ZHAO W Z. Detection and tracking method of lane line for intelligent vehicles under complex illumination condition[J]. Journal of Automotive Safety and Energy, 2019, 10(4): 459-466. | |
| 6 | 吴骅跃, 赵祥模. 基于IPM和边缘图像过滤的多干扰车道线检测[J]. 中国公路学报, 2020, 33(5): 153-164. |
| WU H Y, ZHAO X M. Multi-interference lane recognition based on IPM and edge image filtering[J]. China Journal of Highway and Transport, 2020, 33(5): 153-164. | |
| 7 | 张嘉明, 钱立军, 邱利宏, 等. 一种多线形车道线检测算法[J]. 合肥工业大学学报(自然科学版), 2020, 43(4): 536-542,570. |
| ZHANG J M, QIAN L J, QIU L H, et al. A multiple lane detection algorithm[J]. Journal of Hefei University of Technology(Natural Science), 2020, 43(4): 536-542,570. | |
| 8 | 陈无畏, 蒋玉亭, 谈东奎. 一种基于边缘点投影的车道线快速识别算法[J]. 汽车工程, 2017, 39(3): 357-363. |
| CHEN W W, JIANG Y T, TAN D K. A fast lane marking recognition algorithm based on edge projection[J]. Automotive Engineering, 2017, 39(3): 357-363. | |
| 9 | PAN X, SHI J, LUO P, et al. Spatial as deep: spatial CNN for traffic scene understanding[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2018: 7276-7283. |
| 10 | HOU Y, MA Z, LIU C, et al. Learning lightweight lane detection CNNs by self attention distillation[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 1013-1021. |
| 11 | NEVEN D, DE B B, GEORGOULIS S, et al. Towards end-to-end lane detection: an instance segmentation approach[C]. 2018 IEEE Intelligent Vehicles Symposium(IV). IEEE, 2018: 286-291. |
| 12 | QIN Z, WANG H, LI X. Ultra fast structure-aware deep lane detection[C]. Proceedings of European Conference on Computer Vision, 2020: 276-291. |
| 13 | YOO S, LEE H S, MYEONG H, et al. End-to-end lane marker detection via row-wise classification[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2020: 1006-1007. |
| 14 | TABELINI L, BERRIEL R, PAIXAO T M, et al. Polylanenet: lane estimation via deep polynomial regression[C]. Proceedings of the International Conference on Pattern Recognition. IEEE, 2021: 6150-6156. |
| 15 | LIU R, YUAN Z, LIU T, et al. End-to-end lane shape prediction with transformers[C]. Proceedings of the IEEE Winter Conference on Applications of Computer Vision, 2021: 3694-3702. |
| 16 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 17 | DENG J, DONG W, SOCHER R, et al. Imagenet: a large-scale hierarchical image database[C]. 2009 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2009: 248-255. |
| 18 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2117-2125. |
| 19 | YU F, KOLTUN V. Multi-scale context aggregation by dilated convolutions[C]. Proceedings of the 4th International Conference on Learning Representations. IEEE, 2016: 1-13. |
| 20 | WANG P, CHEN P, YUAN Y, et al. Understanding convolution for semantic segmentation[C]. 2018 IEEE Winter Conference on Applications of Computer Vision. IEEE, 2018:1451-1460. |
| 21 | BÄCKLUND H, HEDBLOM A, NEIJMAN N. A density-based spatial clustering of application with noise[J]. Data Mining TNM033, 2011: 11-30. |
| 22 | MISHRA P, SARAWADEKAR K. Polynomial learning rate policy with warm restart for deep neural network[C]. IEEE Region Ten Conference. IEEE, 2019: 2087-2092. |
| [1] | 胡林,李根,王方,林淼,巫宁. 基于CIDAS事故数据的路口乘用车-两轮车测试场景研究[J]. 汽车工程, 2023, 45(8): 1417-1427. |
| [2] | 江浩斌, 路保松, 李傲雪. 汽车行驶轨迹数据密度峰值聚类算法研究[J]. 汽车工程, 2023, 45(7): 1153-1162. |
| [3] | 陈妍妍,王海,蔡英凤,陈龙,李祎承. 基于检测的高效自动驾驶实例分割方法[J]. 汽车工程, 2023, 45(4): 541-550. |
| [4] | 姜俊昭,杨文豪,彭彬,郭婷,徐业凯,王国卓. 基于能耗加权策略的燃料电池汽车续驶里程预测[J]. 汽车工程, 2023, 45(12): 2357-2365. |
| [5] | 金立生,贺阳,王欢欢,霍震,谢宪毅,郭柏苍. 基于自适应阈值DBSCAN的路侧点云分割算法[J]. 汽车工程, 2022, 44(7): 987-996. |
| [6] | 张哲雨,吕超,李景行,熊光明,吴绍斌,龚建伟. 基于车辆视角数据的行人轨迹预测与风险等级评定[J]. 汽车工程, 2022, 44(5): 675-683. |
| [7] | 黄鹤,李文龙,杨澜,王会峰,王飚,茹锋. DHSSA优化的K均值互补迭代车型信息数据聚类[J]. 汽车工程, 2022, 44(5): 691-700. |
| [8] | 马雷,刘泽宾,曹彪,王文举,邱泉源. 基于粗糙性度量的道路可行驶区域识别方法[J]. 汽车工程, 2021, 43(11): 1594-1601. |
| [9] | 赵治国,王鹏,陈晓蓉,梁凯冲. 转向避撞工况下装载激光雷达车辆的障碍物跟踪[J]. 汽车工程, 2021, 43(11): 1611-1619. |
| [10] | 章军辉,付宗杰,郭晓满,李庆,陈大鹏,赵野. 基于HS⁃FCM模糊聚类的快速多目标车辆跟踪算法[J]. 汽车工程, 2021, 43(10): 1419-1426. |
| [11] | 孙文,荣浚材,王军年,徐佳,吕斯文,刘俐丽. 带弯道信息的城市复合行驶工况构建方法研究[J]. 汽车工程, 2021, 43(10): 1519-1527. |
| [12] | 郭景华, 李克强, 王进, 陈涛, 李文昌, 王班. 基于危险场景聚类分析的前车随机运动状态预测研究*[J]. 汽车工程, 2020, 42(7): 847-853. |
| [13] | 朱冰, 张培兴, 赵健. 面向多维度逻辑场景的自动驾驶安全性聚类评价方法*[J]. 汽车工程, 2020, 42(11): 1458-1463. |
| [14] | 谷先广, 孟科委, 姚鑫鑫, 汪洪波. 基于组合聚类的智能汽车横向稳定性判别方法*[J]. 汽车工程, 2020, 42(11): 1497-1505. |
| [15] | 赵治国, 冯建翔, 周良杰, 王凯, 胡昊锐, 张海山, 宁忠麟. 驾驶员避撞转向行为的改进K-means聚类与识别*[J]. 汽车工程, 2020, 42(1): 52-58. |
|