汽车工程 ›› 2023, Vol. 45 ›› Issue (4): 637-646.doi: 10.19562/j.chinasae.qcgc.2023.04.012
所属专题: 底盘&动力学&整车性能专题2023年
康宇航1,李韶华1( ),杨泽坤1,2
),杨泽坤1,2
Yuhang Kang1,Shaohua Li1(),Zekun Yang1,2
摘要:
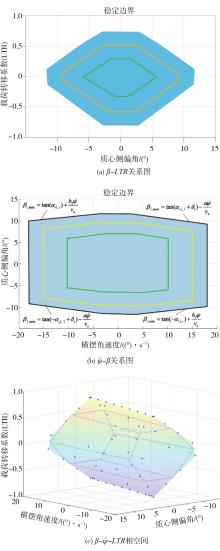
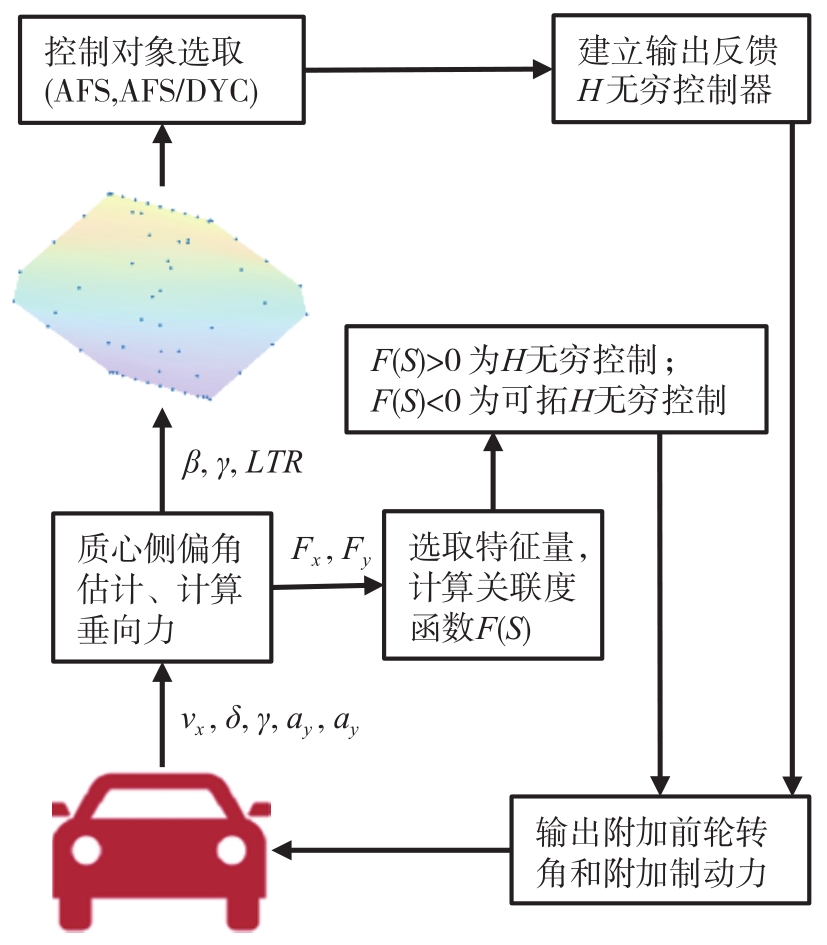
重型商用车存在转动惯量大、控制响应慢等特点。针对重型商用车,基于质心侧偏角、横摆角速度、垂向载荷转移系数设计了三维相空间分析方法,从而判断车辆的实时稳定状态。针对不同的车辆行驶状态,采用AFS控制和AFS/DYC分级控制,并基于利用附着系数设计了可拓控制方法,从而补偿前轮转角和横摆力矩的控制输出,以保证控制器在不同工况下的鲁棒性。通过TruckSim/Simulink联合仿真和硬件在环实验验证了该方法的有效性,并在仿真中通过