汽车工程 ›› 2024, Vol. 46 ›› Issue (11): 1952-1961.doi: 10.19562/j.chinasae.qcgc.2024.11.002
赵健,李文旭,朱冰( ),张培兴,汤瑞,李嘉胜
),张培兴,汤瑞,李嘉胜
Jian Zhao,Wenxu Li,Bing Zhu(),Peixing Zhang,Rui Tang,Jiasheng Li
摘要:
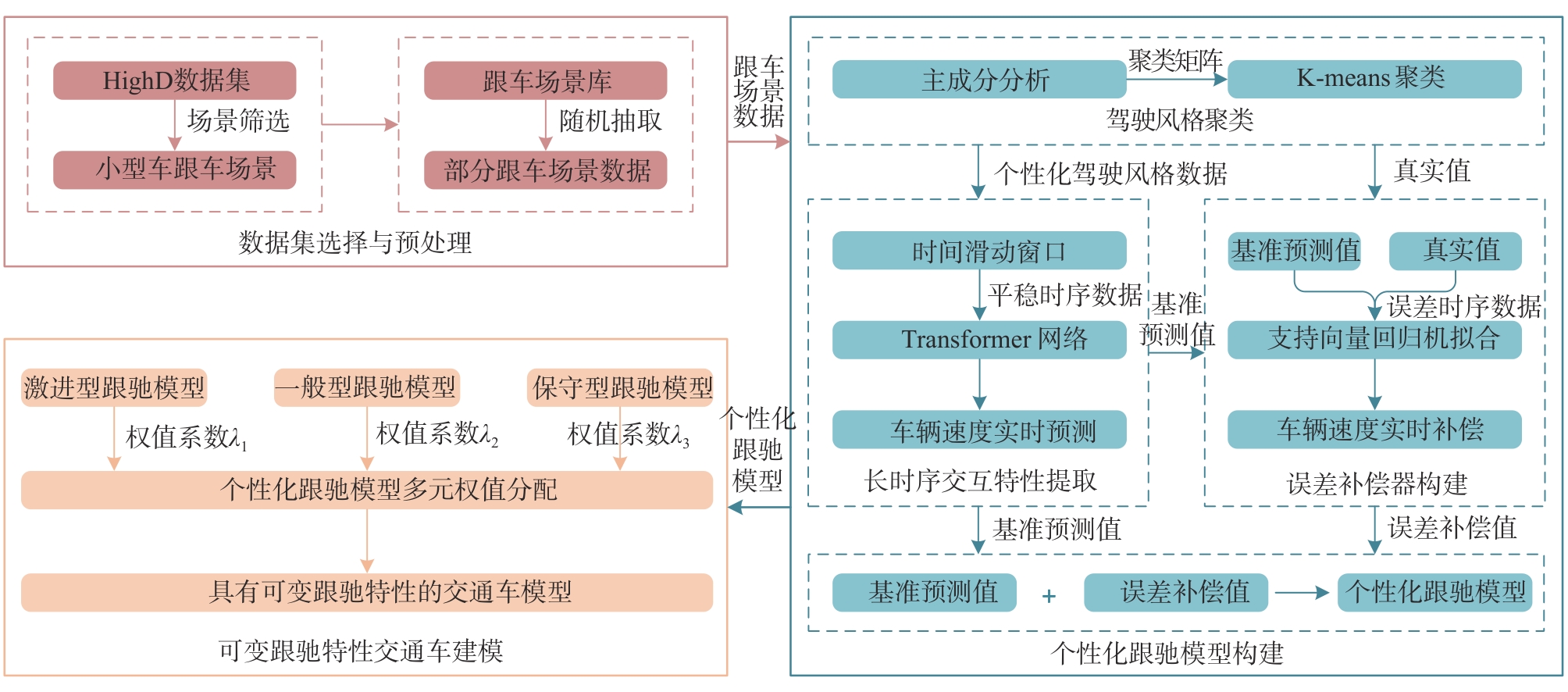
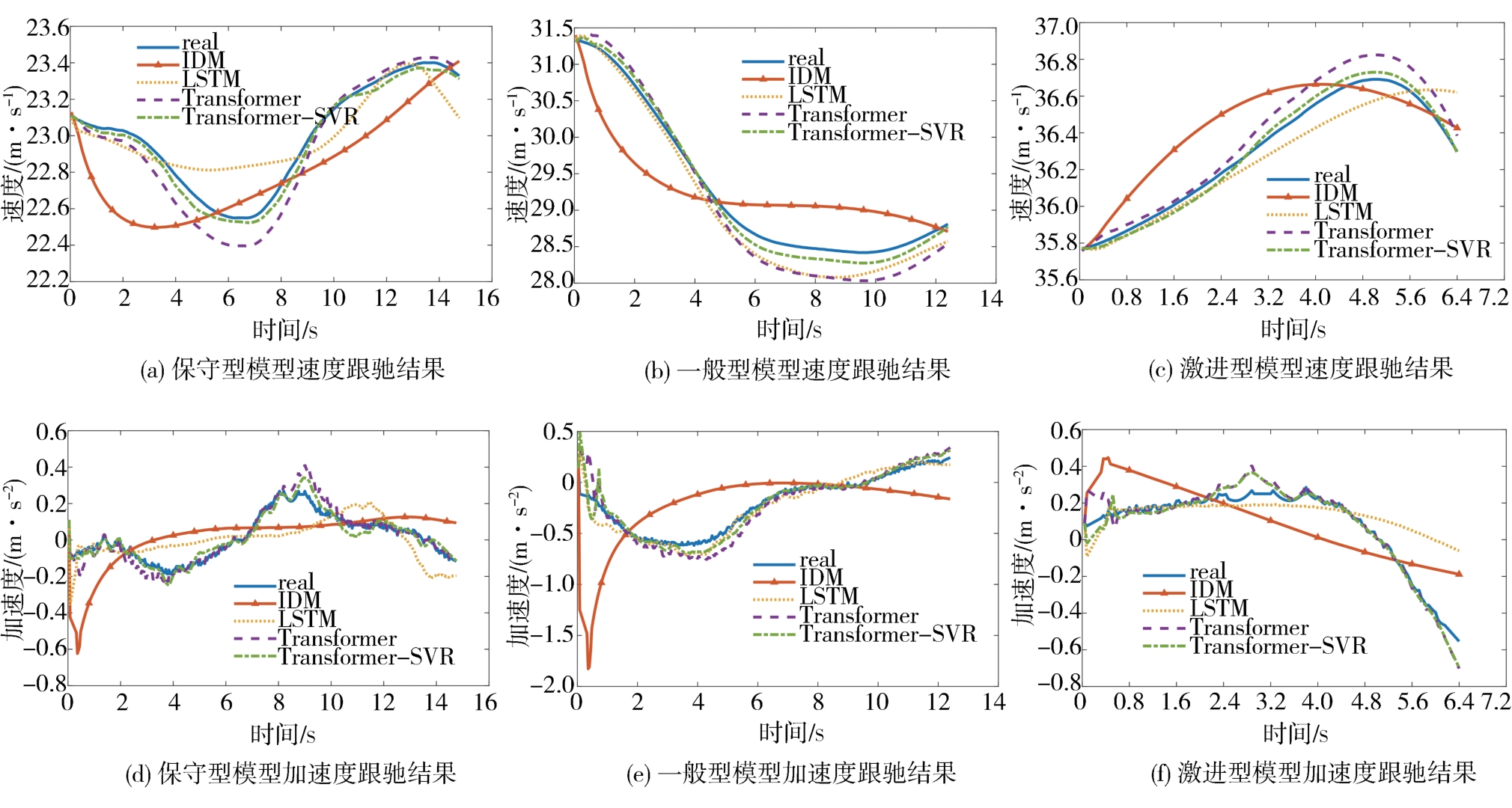
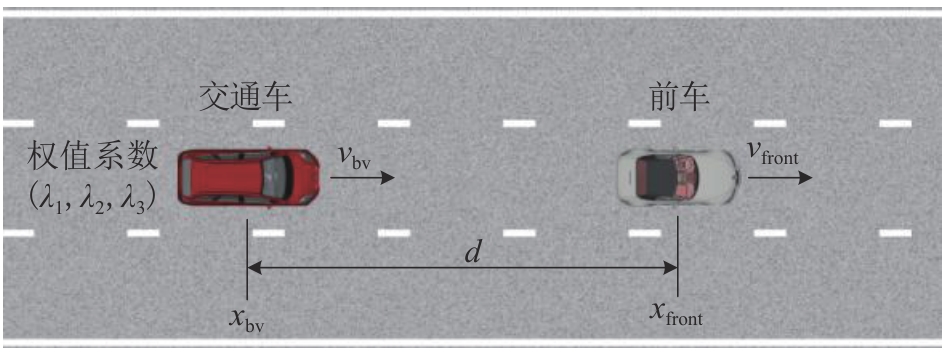
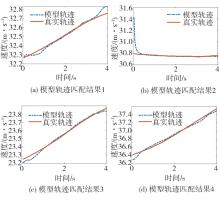
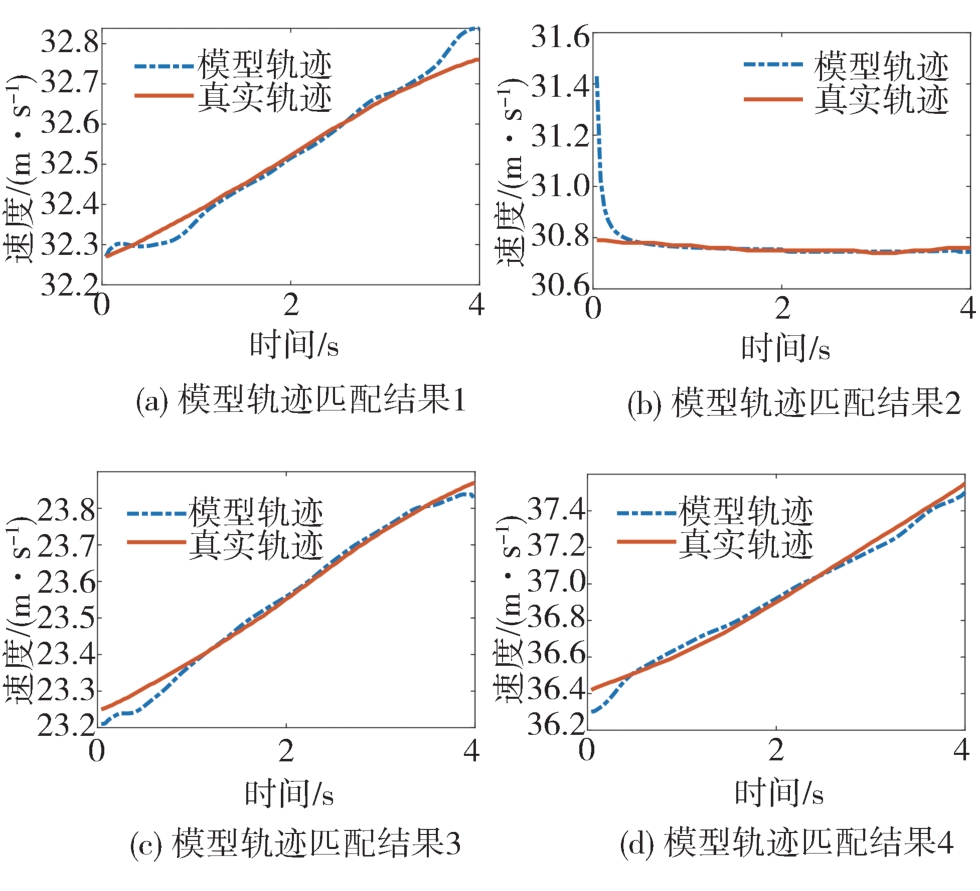
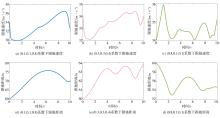
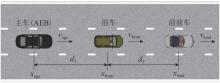
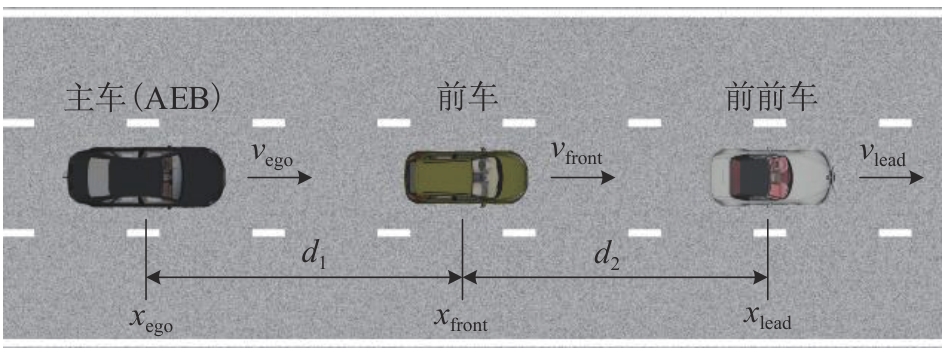
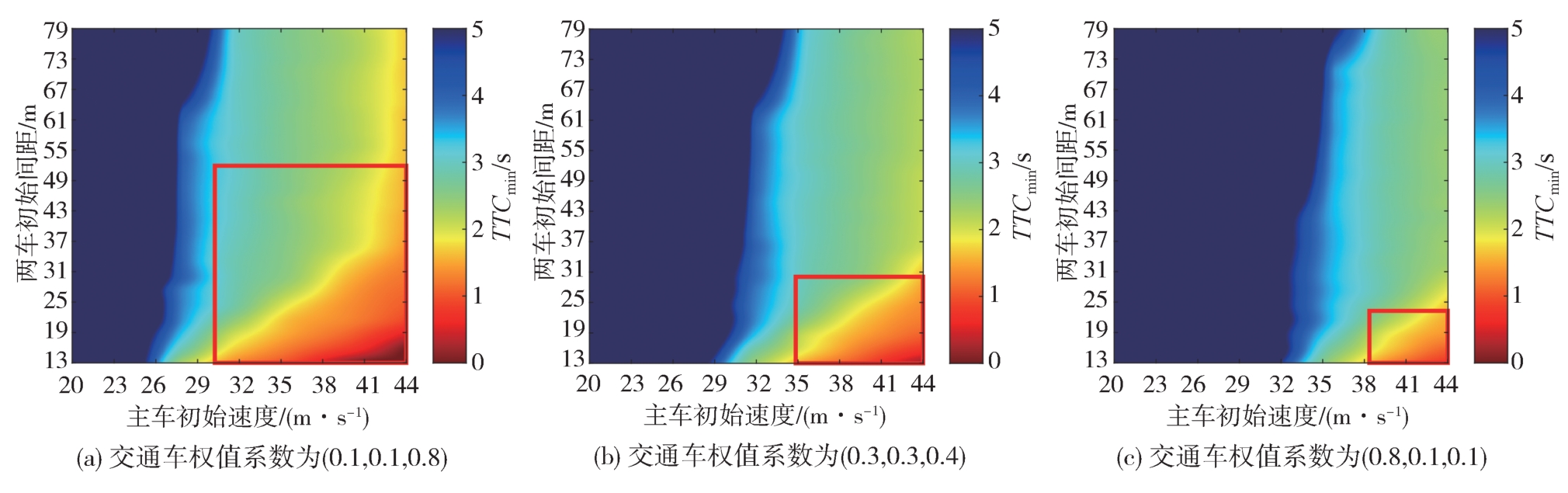
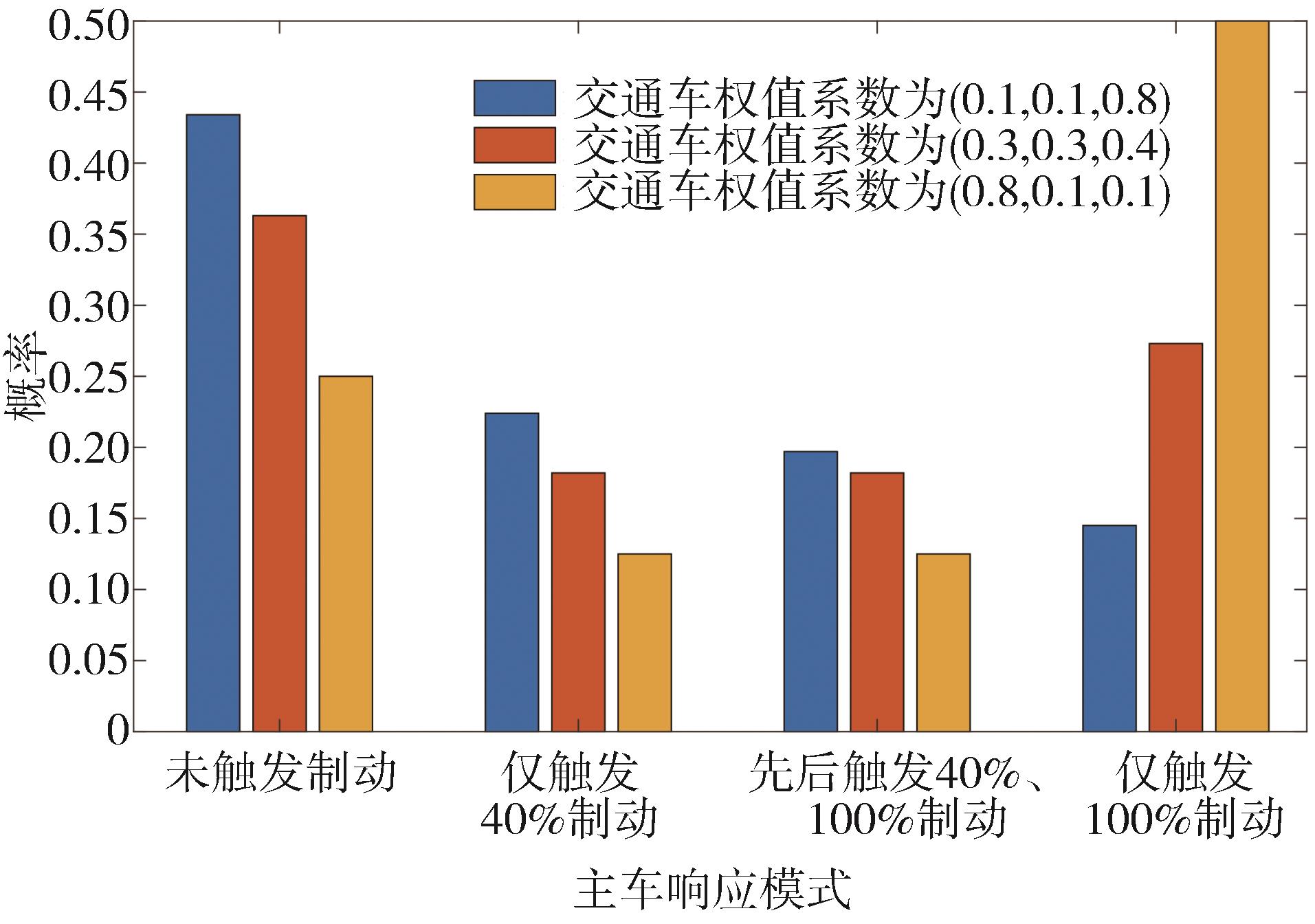
提出一种面向智能驾驶测试的可变跟驰特性交通车建模方法。首先,通过对自然驾驶数据聚类分析,建立高真实交互个性化的跟驰模型,并利用模型输出耦合赋予多元权值,构建可用于智能驾驶测试的可变跟驰特性交通车模型;然后,通过建立交通车轨迹评价方法验证模型输出轨迹的合理性、多样性及真实性;最后,搭建联合仿真平台进行了所构建交通车模型对自动紧急制动(autonomous emergency braking, AEB)算法的应用测试。结果表明,本文构建的交通车模型可以输出不同跟驰特性下合理、多样且真实的轨迹,当轨迹数量达到60 000条时与真实自然驾驶速度轨迹匹配的平均均方根误差为0.427 m/s,且在不同交通车轨迹特性下待测系统行为响应不尽相同,通过权值系数的变化可以揭示待测系统响应的演化规律,并可实现待测系统性能的针对性测试。