| [1] |
章仁燮,熊璐,余卓平. 智能汽车转向轮转角主动控制[J].机械工程学报2017,53(14) :106-113.
|
|
ZHANG Renxie,XIONG Lu,YU Zhuoping. Active steering angle control for intelligent vehicle [J].Journal of Mechanical Engineering,2017,53(14):106-113.
|
| [2] |
BHARDWAJ A, SLAVIN D, WALSH J, et al. Estimation and decomposition of rack force for driving on uneven roads[J]. Control Engineering Practice,2021,114.
|
| [3] |
宗长富,麦莉,王德平,等. 基于驾驶模拟器的驾驶员所偏好的方向盘力矩特性研究[J]. 中国机械工程,2007,18(8):1001-1005.
|
|
ZONG Changfu,MAI Li,WANG Deping,et al.Study on steering effort preference of drivers based on driving simulator[J]. China Mechanical Engineering,2007,18(8):1001-1005.
|
| [4] |
赵林峰,从光好,邵文彬,等. 线控转向车辆方向盘转矩特性研究[J]. 机械工程学报,2018,54(24):138-146.
|
|
ZHAO Linfeng,CONG Guanghao,SHAO Wenbin,et al. Study on steering torque characteristic for steer-by-wire vehicles[J]. Journal of Mechanical Engineering, 2018,54(24):138-146.
|
| [5] |
郑宏宇,宗长富,王祥. 汽车线控转向系统路感模拟方法[J]. 农业机械学报,2011,42(2):18-22.
|
|
ZHENG Hongyu,ZONG Changfu,WANG Xiang. Road feel design for vehicle steer-by-wire system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011,42(2):18-22.
|
| [6] |
朴文海,曹雷,冷搏,等. 基于路感重构的线控转向系统可调节路感反馈策略研究[J]. 汽车零部件,2022(z1):23-31.
|
|
PIAO Wenhai,CAO Lei,LENG Bo,et al. Research on adjustable road feeling feedback for steering-by-wire system based on road feeling reconstruction[J]. Automobile Parts, 2022(z1):23-31.
|
| [7] |
于蕾艳,林逸,施国标. 线控转向系统路感控制策略的研究[J]. 计算机仿真,2008,25(6):248-250,269.
|
|
YU Leiyan,LIN Yi,SHI Guobiao. Research on road feel control strategy of steer-by-wire system[J]. Computer Simulation, 2008,25(6):248-250,269.
|
| [8] |
孙运全,李亚杰,张蕴昕.补偿转向盘振动力矩的控制策略研究[J].计算机测量与控制,2015,23(4):1179-1181,1208.
|
|
SUN Yunquan,LI Yajie,ZHANG Yunxin. Research on compensation of steering vibration of electric power steering system[J]. Computer Measurement & Control, 2015,23(4):1179-1181,1208.
|
| [9] |
葛盼盼. 基于干扰预估计电动汽车主动摆振控制方法研究[D].杭州: 杭州电子科技大学,2020.
|
|
GE Panpan. Research on active oscillation control method of electric vehicle based on interference prediction[D]. Hangzhou :Hangzhou Dianzi University,2020.
|
| [10] |
袁东,马晓军,曾庆含,等. 二阶系统线性自抗扰控制器频带特性与参数配置研究[J]. 控制理论与应用,2013,30(12):1630-1640.
|
|
YUAN Dong,MA Xiaojun,ZENG Qinghan,et al. Research on frequency-band characteristics and parameters configuration of linear active disturbance rejection control for second-order systems[J]. Control Theory & Applications,2013,30(12):1630-1640.
|
| [11] |
BALACHANDRAN A, GERDES J C. Designing steering feel for steer-by-wire vehicles using objective measures[J]. IEEE/ASME Transactions on Mechatronics, 2014, 20(1): 373-383.
|
| [12] |
宗长富,李刚,郑宏宇,等.线控汽车底盘控制技术研究进展及展望[J].中国公路学报,2013,26(2):160-176.
|
|
ZONG Changfu,LI Gang,ZHENG Hongyu,et al.Study progress and outlook of chassis control technology for X-by-wire automobile[J]. China Journal of Highway and Transport,2013,26(2):160-176.
|
| [13] |
余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
|
|
YU Zhisheng. Automobile theory[M]. 5th ed.Beijing: China Machine Press,2009.
|
| [14] |
李涛涛.线控转向系统操纵性改善策略与转向盘回正力矩研究[D].长春:吉林大学,2007.
|
|
LI Taotao. Steer-by-wire system maneuverability improvement strategy and steering wheel return torque research[D].Chang-chun:Jilin University,2007.
|
| [15] |
于开平,邹经湘,杨炳渊.小波函数的性质及其应用研究[J].哈尔滨工业大学学报,2000(2):36-39.
|
|
YU Kaiping,ZOU Jingxiang,YANG Bingyuan. Study on performance and application of the wavelet function[J]. Journal of Harbin Institute of Technology,2000(2):36-39.
|
| [16] |
张静远,张冰,蒋兴舟. 基于小波变换的特征提取方法分析[J]. 信号处理,2000,16(2):156-162,155.
|
|
ZHANG Jingyuan,ZHANG Bing,JIANG Xingzhou. Analyses of feature extraction methods based on wavelet transform[J]. Journal of Signal Processing,2000,16(2):156-162,155.
|
| [17] |
久代育生, 山田大介, 澤村浩志, 等. ステアリング振動によるロードインフォメーションと剛性感の評価[J]. 日本機械学会論文集, 2018, 84(868): 18-00094-18-00094.
|
| [18] |
GIACOMIN J, WOO Y J. The role of the scale and the frequency bandwidth of steering wheel vibration on road surface recognition[J]. 8th International Symposium on Advanced Vehicle Control (AVEC '06) , Taipei, Taiwan, Aug 20-24th, 2006.
|
| [19] |
BERBER-SOLANO T P. Evaluation of the human cognitive detection of road surfaces based on the feedback vibrations provided by the automobile steering wheel[D]. University of Sheffield, 2009.
|
| [20] |
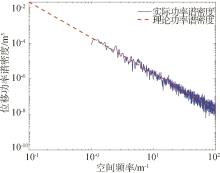
中华人民共和国国家质量监督检验检疫总局. 机械振动 道路路面谱测量数据报告:GB/T 7031—2005[S]. 2005.
|
 ),林先鹏1,李臣旭2,沈同辉1,唐斌1
),林先鹏1,李臣旭2,沈同辉1,唐斌1