汽车工程 ›› 2022, Vol. 44 ›› Issue (1): 123-130.doi: 10.19562/j.chinasae.qcgc.2022.01.015
所属专题: 底盘&动力学&整车性能专题2022年
梁宝钰1,2,汪怡平1,2( ),刘珣1,2,张倩文1,2,熊建波1,2,胡兴军3,王靖宇3
),刘珣1,2,张倩文1,2,熊建波1,2,胡兴军3,王靖宇3
Baoyu Liang1,2,Yiping Wang1,2(),Xun Liu1,2,Qianwen Zhang1,2,Jianbo Xiong1,2,Xingjun Hu3,Jingyu Wang3
摘要:
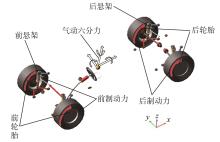
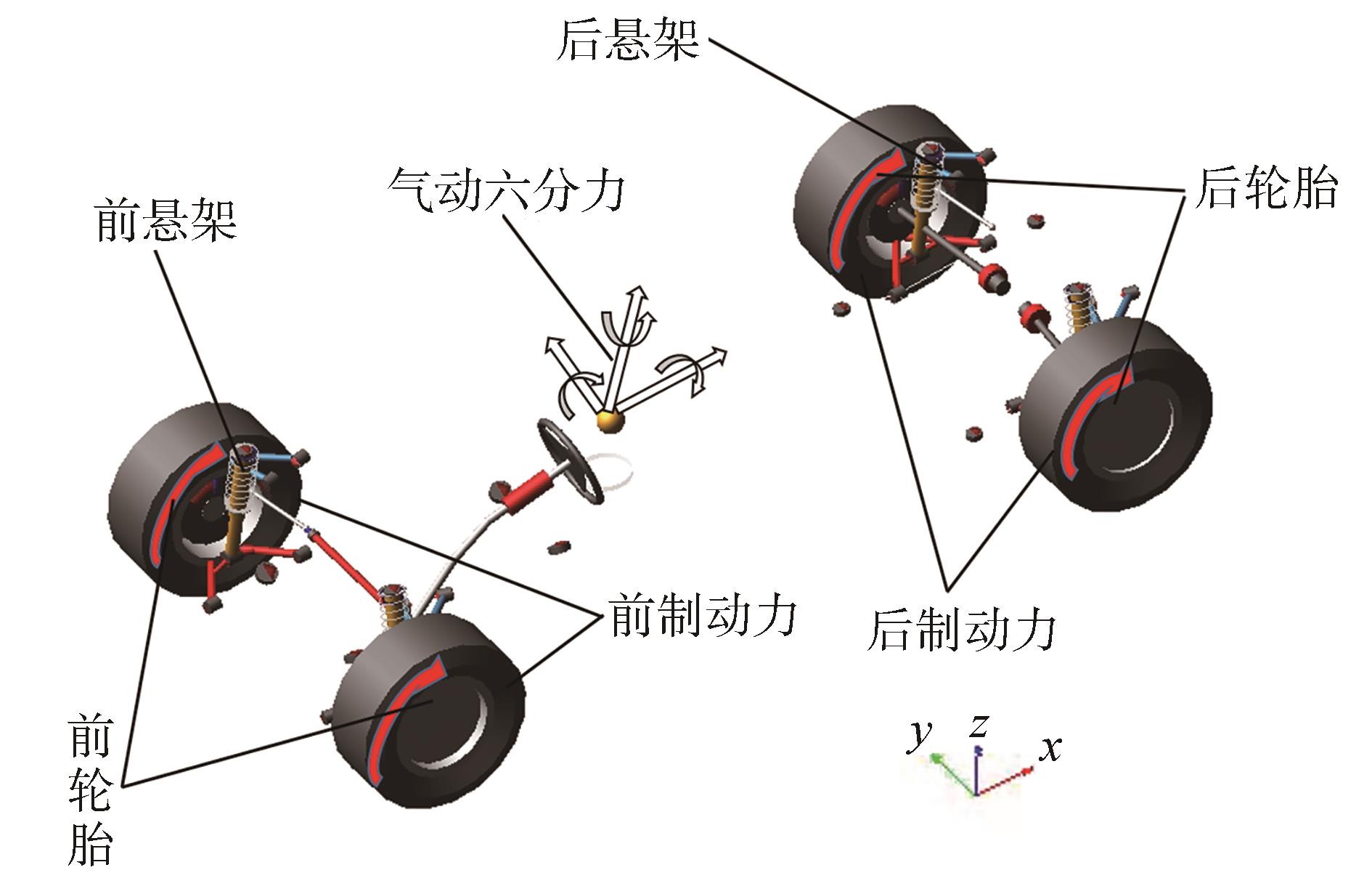
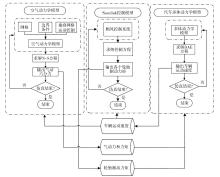
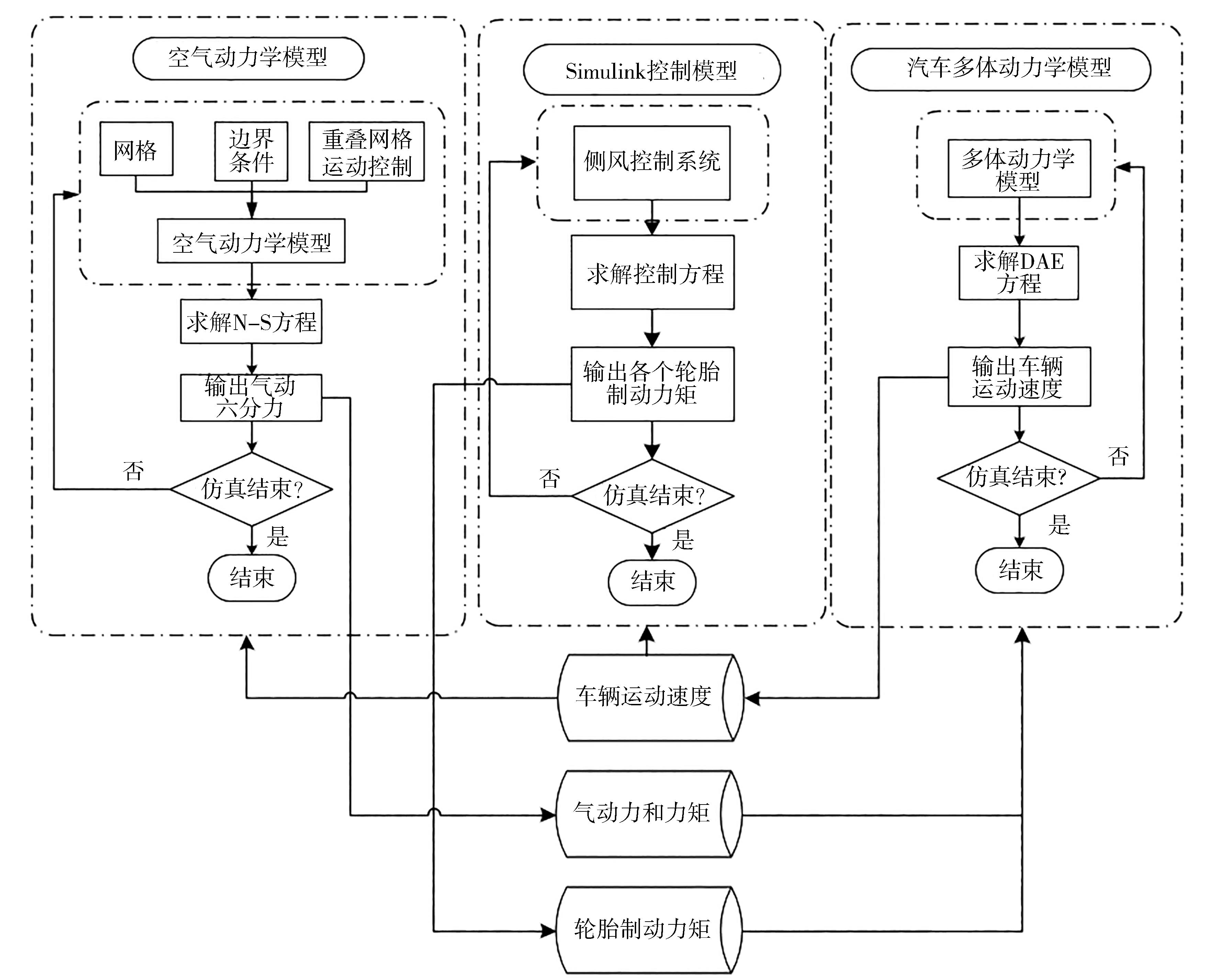
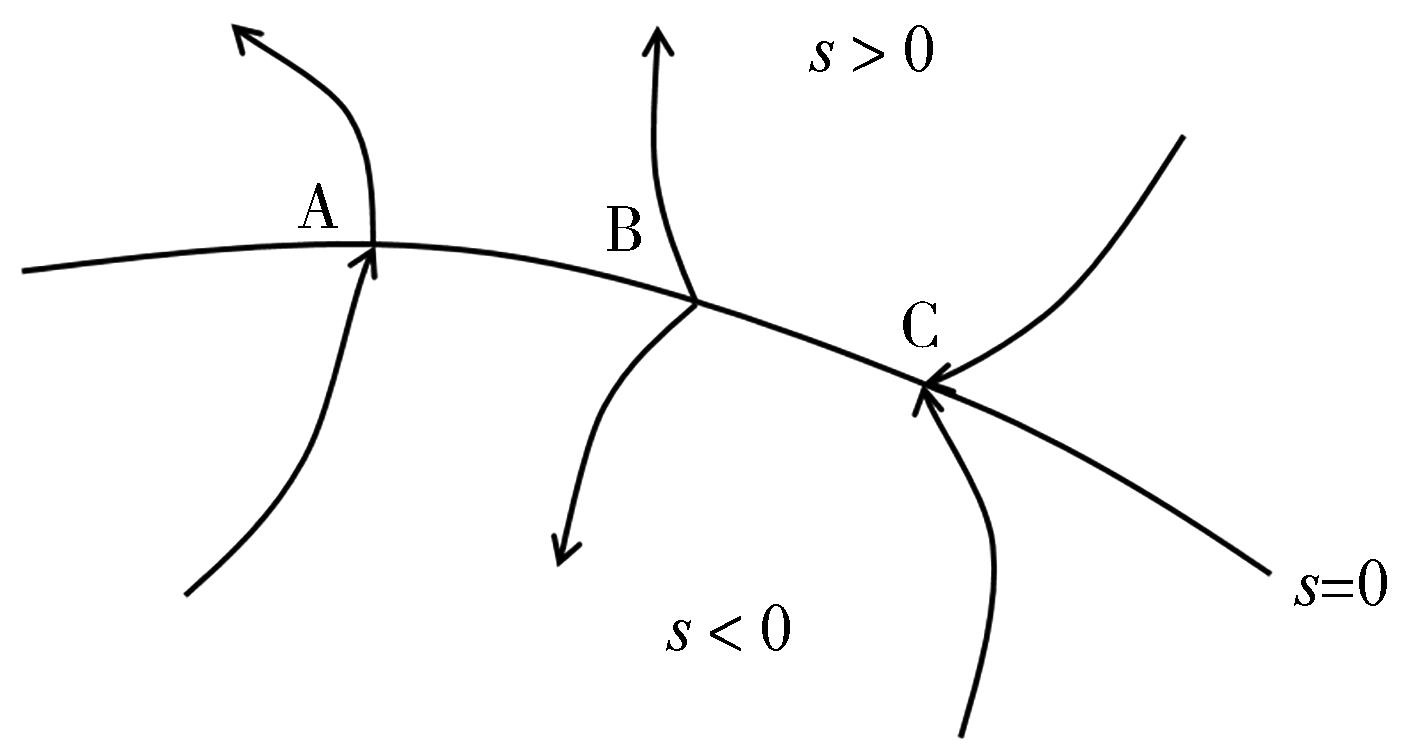
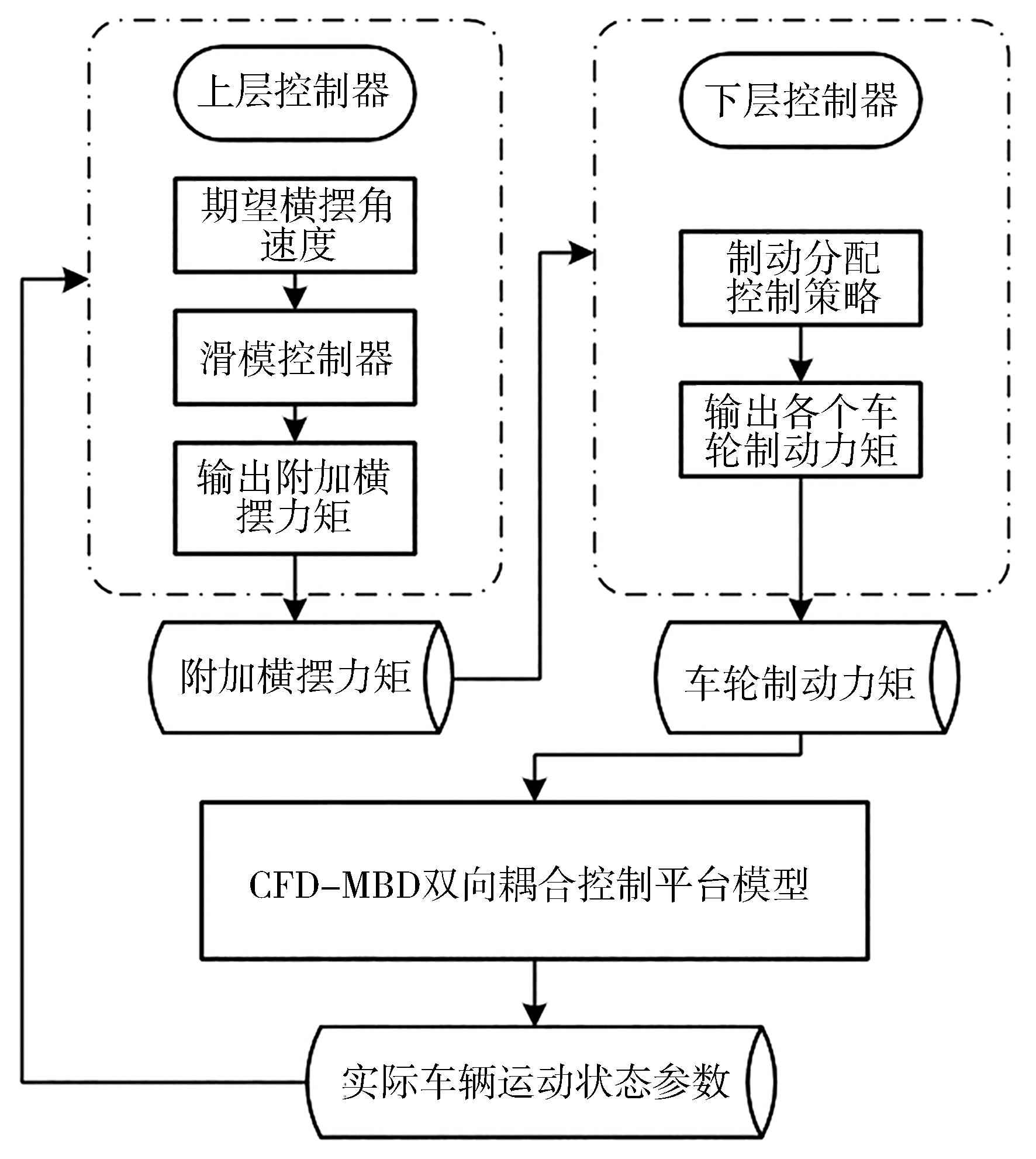
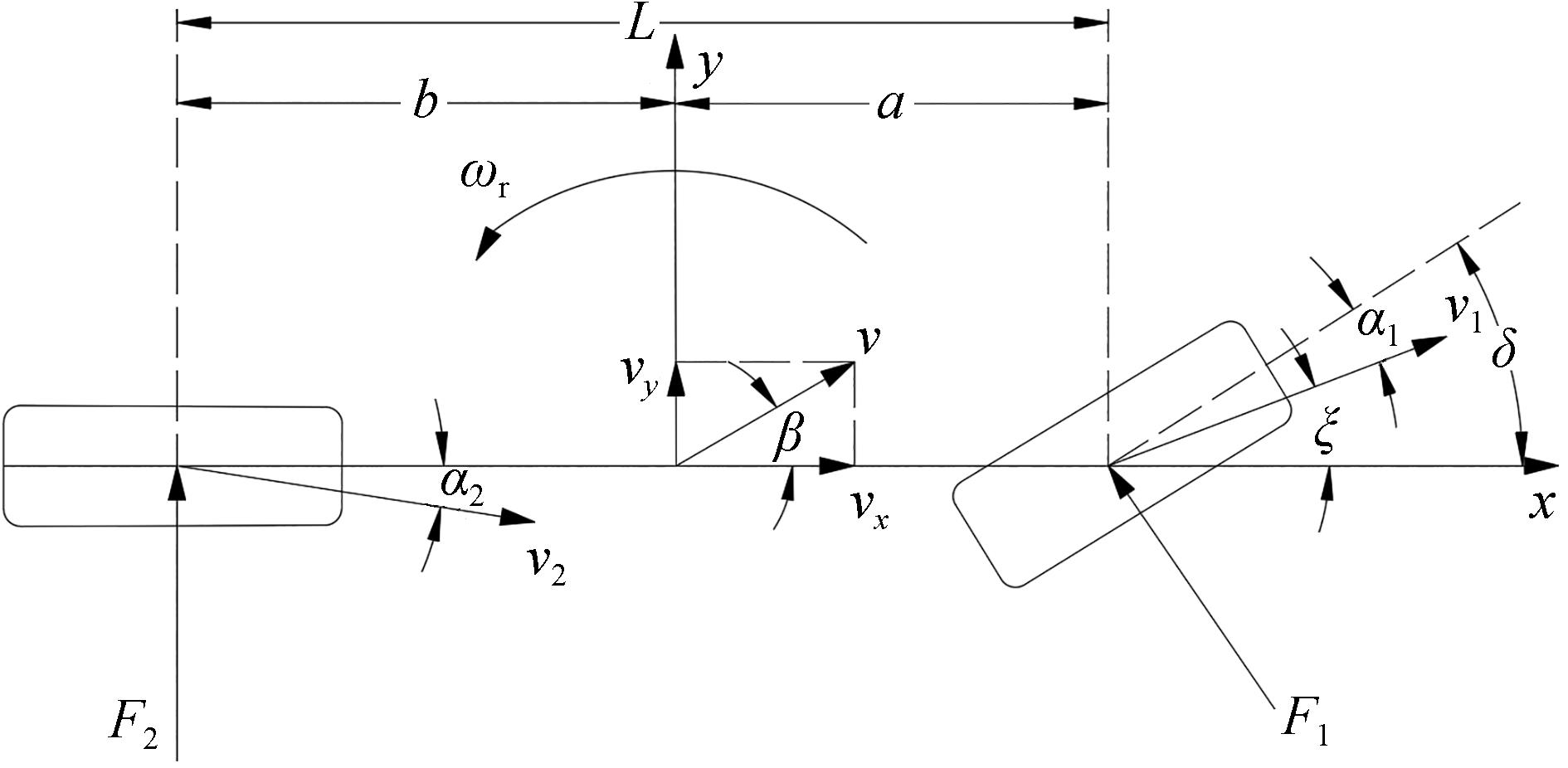
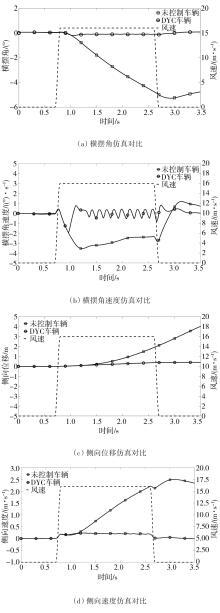
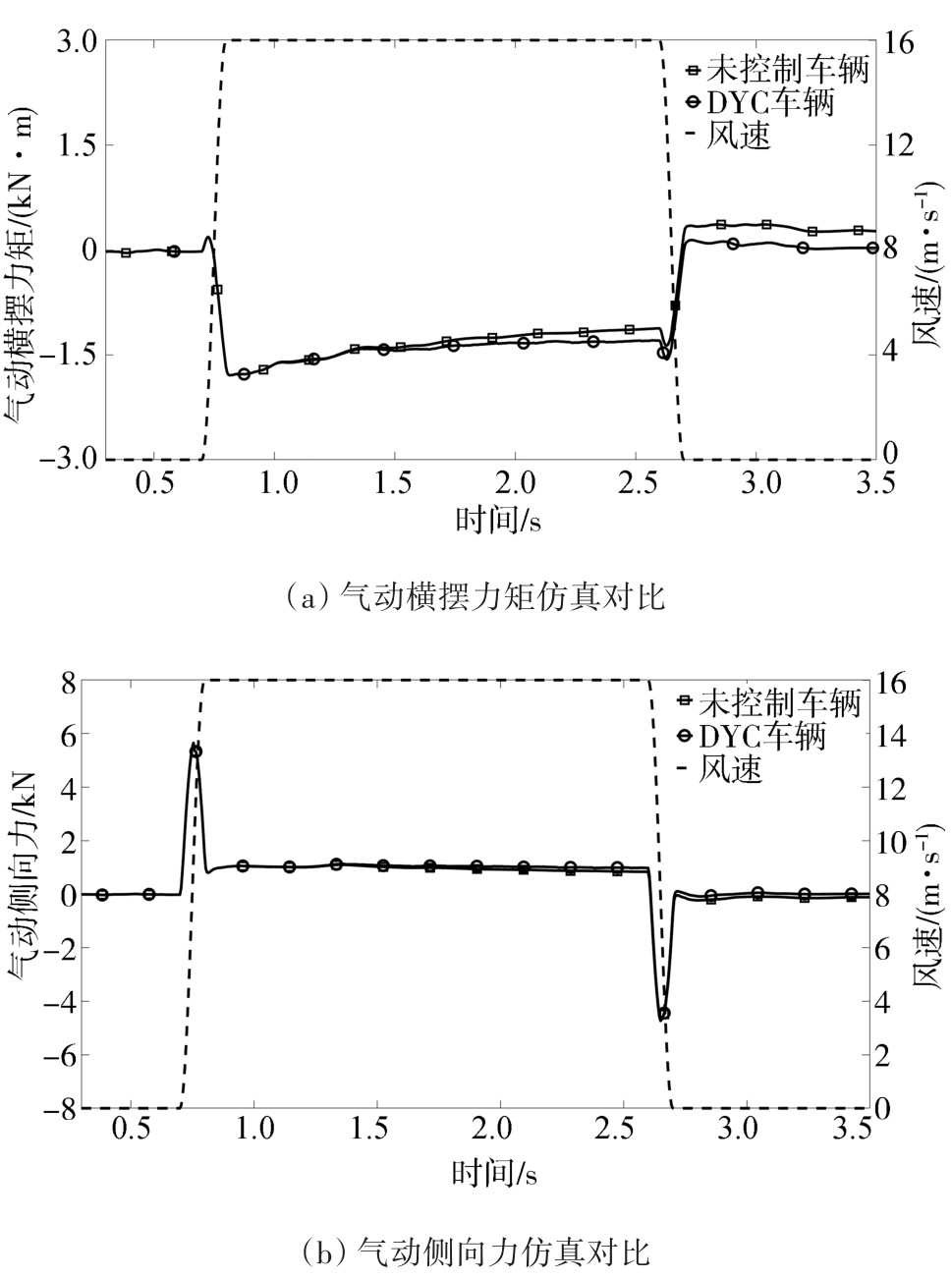
针对高速车辆侧风稳定性问题,搭建了汽车多体动力学(multi-body dynamics,MBD)和计算流体力学(computational fluid dynamics,CFD)双向耦合平台,并基于该平台设计了一种侧风稳定性控制系统。该系统的上层控制器基于滑模理论计算出侧风干扰下的高速车辆为维持稳定所需的附加横摆力矩,下层控制器将上层控制器输出的横摆力矩分配到各个车轮,从而完成车辆的抗侧风干扰控制。分析了未受控制车辆与直接横摆力矩控制(direct yaw-moment control,DYC)车辆在阶跃侧风下的运动特性和气动特性。研究结果表明,在阶跃侧风中,未受控制车辆的最大横摆角为5.7°,最大侧向位移为4.0 m,而施加DYC后,车辆横摆角基本为0,最大侧向位移为0.41 m,较好地维持了直线行驶状态。表明在此侧风稳定性控制系统下,高速车辆的抗侧风干扰能力得到有效提升。