Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (4): 580-587.doi: 10.19562/j.chinasae.qcgc.2021.04.016
Previous Articles Next Articles
Yue Ren1,Jie Ji1,Ying Zhao1,Yixiao Liang2,Ling Zheng2( )
)
Received:2020-11-16
Revised:2021-01-27
Online:2021-04-25
Published:2021-04-23
Contact:
Ling Zheng
E-mail:zling@cqu.edu.cn
Yue Ren,Jie Ji,Ying Zhao,Yixiao Liang,Ling Zheng. Path Tracking Control of Intelligent Vehicle Based on Minimal Model Error Estimation[J].Automotive Engineering, 2021, 43(4): 580-587.

"

"

"

"

"
"
| 参数 | 取值 |
|---|---|
| 整车质量m/kg | 1 500 |
| 横摆转动惯量Iz /(kg·m-2) | 1 875 |
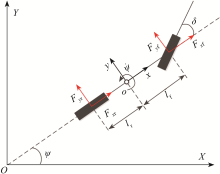
| 质心至前轴距离lf / m | 0.95 |
| 质心至后轴距离lr / m | 1.425 |
| 前轮名义侧偏刚度Cf /(N·rad-1) | 62 900 |
| 后轮名义侧偏刚度Cr/(N·rad-1) | 56 500 |
"

"
| 1 | 熊璐, 杨兴, 卓桂荣, 等.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报, 2020, 56(10): 127-143. |
| XIONG L, YANG X, ZHUO G R. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143 | |
| 2 | AMER N H, ZAMZURI H. Modelling and control strategies in path tracking control for autonomous ground vehicles: a review of state of the art and challenges[J]. Journal of Intelligent and Robotic Systems, 2017, 86(2):1-30. |
| 3 | THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley:The robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23(9): 661-692. |
| 4 | RAJAMANI R, ZHU C, ALEXANDER L. Lateral control of a backward driven front⁃steering vehicle[J]. Control Engineering Practice, 2003, 11(5): 531-540. |
| 5 | RAFFO G V, GOMES G K, NORMEY⁃RICO J E, et al. A predictive controller for autonomous vehicle path tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 92-102. |
| 6 | GAO Y. Model predictive control for autonomous and semiautonomous vehicles[D].San Francisco: University of California, Berkeley, 2014. |
| 7 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 8 | HU C, WANG R R, YAN F, et al. Integral sliding mode yaw control for in⁃wheel⁃motor driven and differentially steered electric vehicles with mismatched disturbances[C]. American Control Conference (ACC), Seattle, 2017: 1654-1659. |
| 9 | WANG J, DAI M, YIN G, et al. Output⁃feedback robust control for vehicle path tracking considering different human drivers' characteristics[J]. Mechatronics, 2017(50): 402-412. |
| 10 | 章仁燮, 熊璐, 余卓平, 等. 基于条件积分算法的无人驾驶车辆轨迹跟踪鲁棒控制方法[J]. 机械工程学报, 2018(18): 129-139. |
| ZHANG R, XIONG L, YU Z, et al. Robust trajectory tracking control of autonomous vehicles based on condition integration method[J]. Journal of Mechanical Engineering, 2018 (18): 129-139. | |
| 11 | TAGNE G, TALJ R, CHARARA A. Higher⁃order sliding mode control for lateral dynamics of autonomous vehicles,with experimental validation[C].Intelligent Vehicles Symposium. Queensland: IEEE, 2013: 678-683. |
| 12 | PIYABONGKARN D, RAJAMANI R, GROGG J A, et al. Development and experimental evaluation of a slip angle estimator for vehicle stability control[J]. IEEE Transactions on Control Systems Technology, 2008, 17(1):78-88. |
| 13 | 周卫琪, 齐翔, 陈龙, 等. 基于无迹卡尔曼滤波与遗传算法相结合的车辆状态估计[J].汽车工程,2019,41(2):198-205. |
| ZHOU W Q, QI X, CHEN L, et al. Vehicle state estimation based on the combination of unscented Kalman filtering and genetic algorithm[J]. Automotive Engineering, 2019, 41(2): 198-205. | |
| 14 | HU C, WANG Z, TAGHAVIFAR H, et al. MME⁃EKF⁃based path⁃tracking control of autonomous vehicles considering input saturation[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 5246-5259. |
| 15 | LIU W, HE H, SUN F. Vehicle state estimation based on minimum model error criterion combining with extended Kalman filter[J]. Journal of the Franklin Institute, 2016, 353(4): 834-856. |
| 16 | REN Y, ZHENG L, KHAJEPOUR A. Integrated model predictive and torque vectoring control for path tracking of 4⁃wheel⁃driven autonomous vehicles[J]. IET Intelligent Transport Systems, 2019, 13(1): 98-107. |
| 17 | LI C, JING H, WANG R, et al. Vehicle lateral motion regulation under unreliable communication links based on robust H∞ output⁃feedback control schema[J]. Mechanical Systems & Signal Processing, 2018, 104: 171-187. |
| [1] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [2] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [3] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
| [4] | Jun Li,Wenxing Wan,Sanqiang Hao,Wu Qin,Feifei Liu. Research on Model Predictive Control of Autonomous Vehicle Path Tracking Under Complex Road Condition [J]. Automotive Engineering, 2022, 44(5): 664-674. |
| [5] | Qin Shi,Xin Liu,Helie Ying,Mingwei Wang,Zejia He,Lin He. Study on the Backstepping Control Algorithm for the Hydraulic Pressure in Electro-hydraulic Brake-by-wire System [J]. Automotive Engineering, 2022, 44(5): 747-755. |
| [6] | Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. |
| [7] | Yunfei Zha,Lü Xiaolong,Xinye Liu,Fangwu Ma. Fusion Estimation of Vehicle State Parameters Based on Dichotomy [J]. Automotive Engineering, 2022, 44(12): 1910-1918. |
| [8] | Weichen Wang,Junqiu Li,Fengchun Sun,Jian Song,Yonghua Wu. Path Tracking Strategy for All-Wheel Steering of Multi-axle Heavy-Duty Vehicles Based on Tube MPC [J]. Automotive Engineering, 2022, 44(11): 1665-1675. |
| [9] | Jie Hu,Xinkai Zhong,Ruinan Chen,Linglei Zhu,Wencai Xu,Minchao Zhang. Path Tracking Control of Intelligent Vehicles Based on Fuzzy LQR [J]. Automotive Engineering, 2022, 44(1): 17-25. |
| [10] | Jian Zhao,Jinpeng Du,Bing Zhu,Zhiwei Wang,Zhicheng Chen,Xiaowen Tao. Longitudinal Cruise Control of Intelligent Vehicles Based on Adaptive Dynamic Sliding Mode Control [J]. Automotive Engineering, 2022, 44(1): 8-16. |
| [11] | Sixu Li,Biao Xu,Manjiang Hu,Yougang Bian,Xiaolong Sun Ning Chen. A Dynamic Model Predictive Control Approach for Multipoint Preview Path Tracking of Articulated Vehicles [J]. Automotive Engineering, 2021, 43(8): 1187-1194. |
| [12] | Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking [J]. Automotive Engineering, 2021, 43(7): 987-994. |
| [13] | Lisheng Jin,Xianyi Xie,Fa Si,Baicang Guo,Jian Shi. Intelligent Driving Path Tracking Algorithm Considering Driver Characteristics [J]. Automotive Engineering, 2021, 43(4): 553-561. |
| [14] | Jun Liang,Fangbo Zhu,Yingfeng Cai,Xiaobo Chen,Long Chen. Intelligent Vehicle Path Tracking Control Based on Complex Curvature Variation [J]. Automotive Engineering, 2021, 43(12): 1771-1779. |
| [15] | Shi Qiujun, Li Jing. Anti-Rollover Control of Bus Based on Nonlinear Disturbance Estimation [J]. Automotive Engineering, 2020, 42(9): 1224-1231. |