Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (12): 2234-2241.doi: 10.19562/j.chinasae.qcgc.2023.12.005
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Lü Ying1,2,3,Xu Qi1,2,Qiuzheng Liu1,2,Xinyu Wang3( ),Guoying Chen4()
),Guoying Chen4()
Received:2023-08-15
Revised:2023-09-03
Online:2023-12-25
Published:2023-12-21
Contact:
Xinyu Wang,Guoying Chen
E-mail:wangxinyu21@mails.jlu.edu.cn;cgy-011@163.com
Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles[J].Automotive Engineering, 2023, 45(12): 2234-2241.
"

"
"
"
| 参数 | 数值 |
|---|---|
| 整车质量 | 2 115 |
| 前轴到质心距离 | 1.406 |
| 后轴到质心距离 | 1.334 |
| 绕 | 3 996.7 |
| 前轮侧偏刚度 | 160 000 |
| 后轮侧偏刚度 | 160 000 |
| 转向传动比 | 16.2 |
| 延迟时间 | 250 |
"
"

"
"
"
"
"
试验 工况 | 行驶 车速 | 是否考虑转向 延迟特性 | 最大横向 偏差 | 转向盘转角 均方差 | 均方差 改变量 |
|---|---|---|---|---|---|
| 直角弯 | 4.2 m/s | 否 | 0.33 m | 52.341 7 | 1.93% |
| 是 | 0.27 m | 51.333 0 | |||
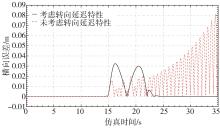
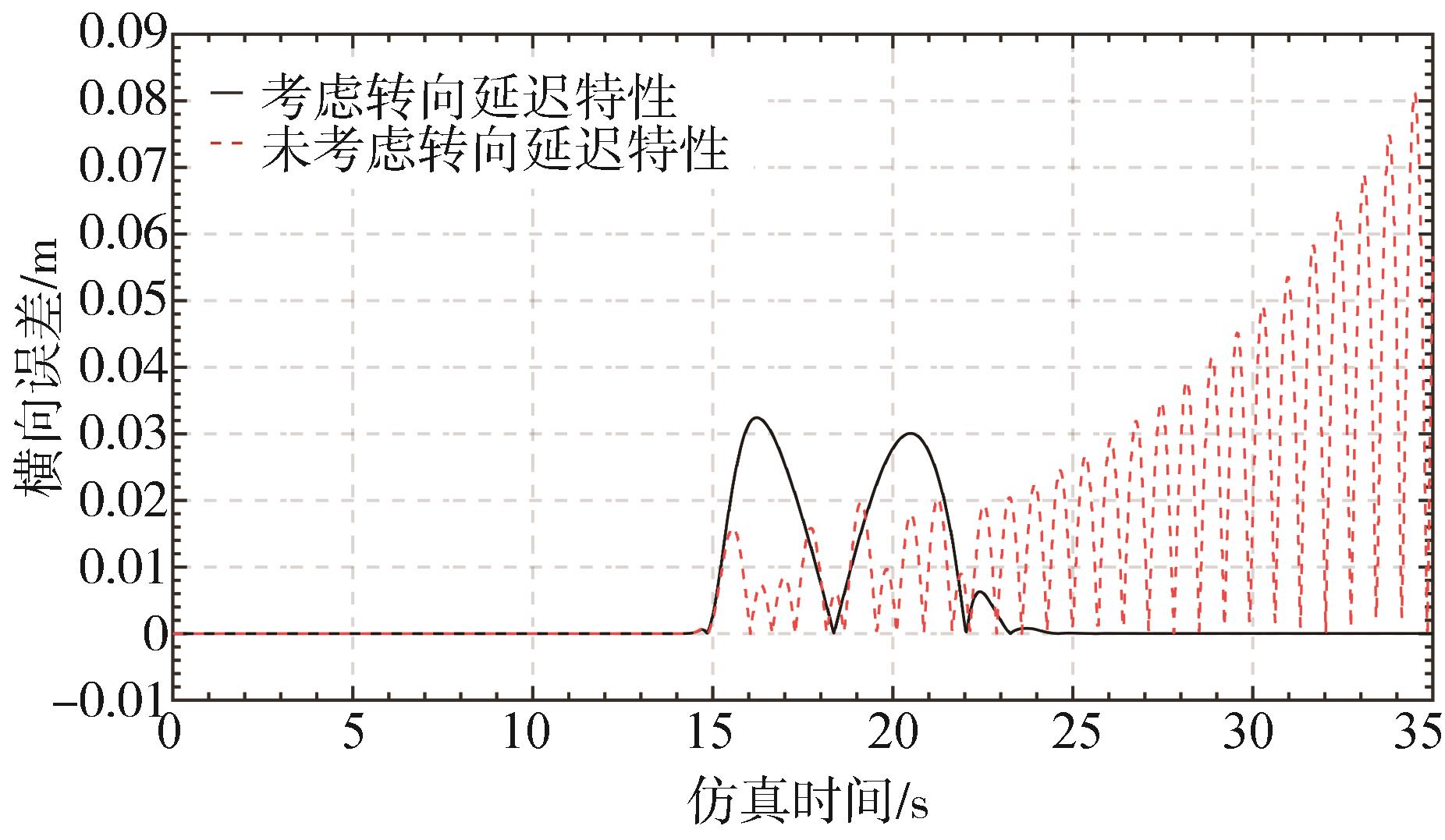
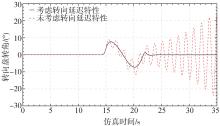
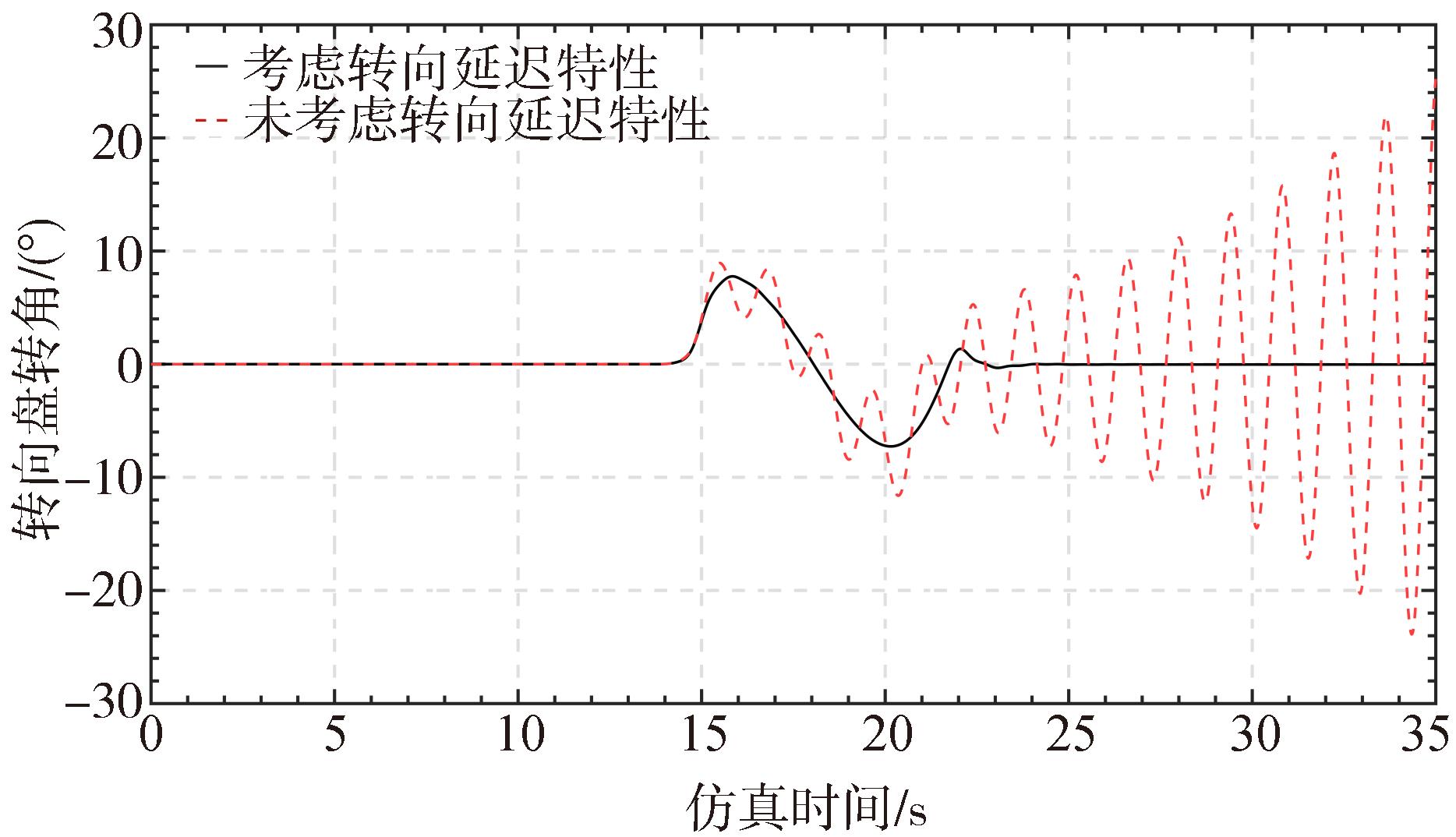
高速 换道 | 13.9 m/s | 否 | 0.09 m | 6.662 8 | 62.22% |
| 是 | 0.035 m | 2.384 0 |

"

"
| 参数 | 数值 |
|---|---|
| 整车质量 | 2 634 |
| 前轴到质心距离 | 1.660 |
| 后轴到质心距离 | 1.449 |
| 绕 | 4 114.2 |
| 前轮侧偏刚度 | 216 000 |
| 后轮侧偏刚度 | 216 000 |
| 转向传动比 | 16.26 |
"
"
"
"
| 1 | KEBBATI Y,AIT‐OUFROUKH N,ICHALAL D,et al. Lateral control for autonomous wheeled vehicles:a technical review[J]. Asian Journal of Control,2022. |
| 2 | 林棻,倪兰青,赵又群,等. 考虑横向稳定性的智能车辆路径跟踪控制[J].华南理工大学学报(自然科学版),2018,46(1):78-84. |
| LIN F,NI L Q,ZHAO Y Q, et al. Intelligent vehicle path tracking control considering lateral stability[J]. Journal of South China University of Technology(Natural Science Edition),2018,46(1):78-84. | |
| 3 | AHN Joonwoo,SHIN Seho,KIM Minsung,et al. Accurate path tracking by adjusting look-ahead point in pure pursuit method[J]. International Journal of Automotive Technology,2021,22(1). |
| 4 | 潘世举,李永乐,李子先,等.基于改进纯跟踪的智能车路径跟随方法[J].汽车工程,2023,45(1):1-8. |
| PAN S J, LI Y L, LI Z X, et al. An intelligent vehicle path following method based on improved pure tracking[J]. Automotive Engineering,2023,45(1):1-8. | |
| 5 | HAN G,FU W,WANG W,et al. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network[J]. Sensors,2017,17(6):1244. |
| 6 | FARAG W. Complex trajectory tracking using PID control for autonomous driving[J]. International Journal of Intelligent Transportation Systems Research,2020,18(2):356-366. |
| 7 | CHOI Y,LEE W,KIM J,et al. A variable-sampling time model predictive control algorithm for improving path-tracking performance of a vehicle[J]. Sensors,2021,21(20):6845. |
| 8 | WANG H,LIU B,PING X,et al. Path tracking control for autonomous vehicles based on an improved MPC[J]. IEEE Access,2019,7:161064-161073. |
| 9 | 郑修磊. 自动驾驶车辆紧急主动避撞控制算法研究[D].长春:吉林大学,2022. |
| ZHENG X L. Research on emergency active collision avoidance control algorithm for self-driving vehicles [D]. Changchun: Jilin University, 2022. | |
| 10 | CHEN G,YAO J,HU H,et al. Design and experimental evaluation of an efficient MPC-based lateral motion controller considering path preview for autonomous vehicles[J]. Control Engineering Practice,2022,123:105164. |
| 11 | XU Q,CHEN J,LI J,et al. Study on LQR control algorithm using superelement model[J]. Journal of Central South University,2016,23(9):2429-2442. |
| 12 | 高琳琳,唐风敏,郭蓬,等. 自动驾驶横向运动控制的改进LQR方法研究[J].机械科学与技术,2021,40(3):435-441. |
| GAO L L,TANG F M,GUO P,et al. Research on improved LQR method for autopilot lateral motion control[J]. Mechanical Science and Technology,2021,40(3):435-441. | |
| 13 | 胡杰,钟鑫凯,陈瑞楠,等. 基于模糊LQR的智能汽车路径跟踪控制[J].汽车工程,2022,44(1):17-25,43. |
| HU J,ZHONG X K,CHEN R N,et al. Fuzzy LQR-based path tracking control for intelligent vehicles[J]. Automotive Engineering,2022,44(1):17-25,43. | |
| 14 | WANG Z,SUN K,MA S,et al. Improved linear quadratic regulator lateral path tracking approach based on a real-time updated algorithm with fuzzy control and cosine similarity for autonomous vehicles[J]. Electronics,2022,11(22):3703. |
| 15 | HOSSAIN T,HABIBULLAH H,ISLAM R. Steering and speed control system design for autonomous vehicles by developing an optimal hybrid controller to track reference trajectory[J]. Machines,2022,10(6):420. |
| 16 | YE Q,WANG R,CAI Y,et al. The stability and accuracy analysis of automatic steering system with time delay[J]. ISA Transactions,2020,104:278-286. |
| 17 | XU S,PENG H. Design,analysis,and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2019,21(1):48-58. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [5] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [6] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
| [7] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [8] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [9] | Jun Li,Wenxing Wan,Sanqiang Hao,Wu Qin,Feifei Liu. Research on Model Predictive Control of Autonomous Vehicle Path Tracking Under Complex Road Condition [J]. Automotive Engineering, 2022, 44(5): 664-674. |
| [10] | Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion [J]. Automotive Engineering, 2022, 44(3): 350-361. |
| [11] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [12] | Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System [J]. Automotive Engineering, 2022, 44(12): 1809-1817. |
| [13] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [14] | Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. |
| [15] | Weichen Wang,Junqiu Li,Fengchun Sun,Jian Song,Yonghua Wu. Path Tracking Strategy for All-Wheel Steering of Multi-axle Heavy-Duty Vehicles Based on Tube MPC [J]. Automotive Engineering, 2022, 44(11): 1665-1675. |