Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (6): 808-820.doi: 10.19562/j.chinasae.qcgc.2022.06.002
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Wenli Li1,2( ),Kaiwen Xiao1,Xiaohui Shi1,Fenghua Liang2,Ping Li2
),Kaiwen Xiao1,Xiaohui Shi1,Fenghua Liang2,Ping Li2
Received:2021-12-01
Revised:2021-12-30
Online:2022-06-25
Published:2022-06-28
Contact:
Wenli Li
E-mail:liwenli@cqut.edu.cn
Wenli Li,Kaiwen Xiao,Xiaohui Shi,Fenghua Liang,Ping Li. Pedestrian-Vehicle Micro-Interaction Model Based on Attention Field of Pedestrian Vision[J].Automotive Engineering, 2022, 44(6): 808-820.
"
"

"
"


"


"

"
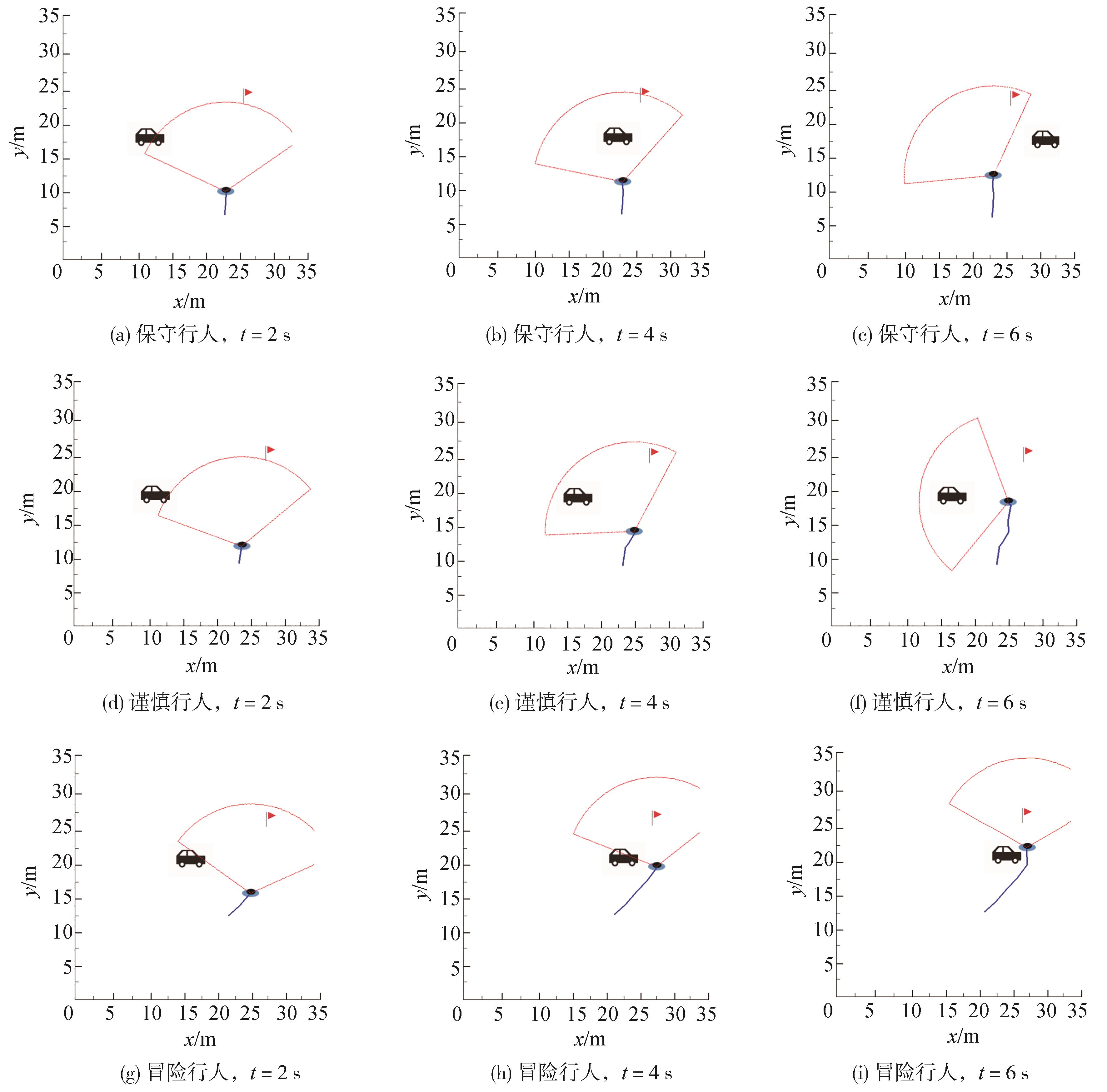
| Frame | id | (x,y)/m | (xtar,ytar)/m | (xp,yp)/m | |
|---|---|---|---|---|---|
| 10 | 3 | 12.5,2.7 | 19.7,24.5 | 25.0,4.3 | 0 |
| 20 | 3 | 13.6,3.4 | 19.7,24.5 | 23.4,9.2 | 13 |
| 150 | 3 | 19.7,24.5 | 19.7,24.5 | 7.9,23.7 | 0 |

"


"

"
| id | |||
|---|---|---|---|
| 1 | 2.05 | 0.78 | 11.46 |
| 2 | 1.68 | 0.73 | 13.67 |
| 231 | 0.98 | 1.25 | 15.64 |
| together | |||
| 0.87 | 1 | 0 | 10.45 |
| 0.68 | 0 | 4 | 15.56 |
| 0.59 | 0 | 10 | 5.68 |
"
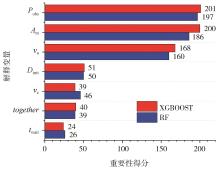
| 变量类型 | 变量 | 变量简述 |
|---|---|---|
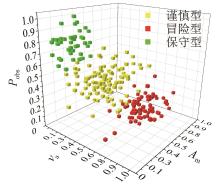
| 被解释变量 | 行人过街风格Style | 0: 让出交互主导权,让来车先行 |
| 1:谨慎交互,平稳前行,不奔跑 | ||
| 2: 积极争夺交互主导权,侵略性强,奔跑 | ||
解释变量 | 最大加速度 | 行人在整个交互区域的最大加速度 |
| 平均速度 | 行人在整个交互区域的平均速度 | |
| 来车初始横向距离 | 初始标定时刻,来车与行人的横向距离 | |
| 车辆平均速度 | 车辆在交互区域的平均速度 | |
| 行人等待时间 | 行人与车辆交互前的停止时间 | |
| 是否同行together | 同一交互区域内,是否有其他行人(0:否,1:是) | |
| 关注度 | 整个标定时间内,行人对来车的关注度 |
"
"
"
"

"
"

"
| 势场类别 | 参数 | 最优取值 | ||
|---|---|---|---|---|
| 保守型 | 谨慎型 | 冒险型 | ||
| 视野注意力势场 | 视野转动惯量 J | 0.01 | 0.10 | 1.00 |
| 过街风格待定系数 | 0.11 | 0.44 | 0.91 | |
| 视野最远距离 l | 12.50 | |||
| 车速待定系数 | 0.03 | |||
| 人工势场 | 目的地引力常量 | |||
| 车辆斥力常量 | 10 | 25 | 40 | |
| 待定系数 K | 0.10 | 0.30 | 0.60 | |
| 目的地引力场距离阈值 d | 20 | |||
| 驾驶员反应时间 [ | 3 | |||
| 舒适减速度 [ | 2.5 | |||
| 参考车速 | 20 | |||

"
"
"
"
势场 类别 | 常规人工势场 | 视野注意力场 + 常规人工势场(本文方法) | ||||
|---|---|---|---|---|---|---|
| MAPE/% | MAE /m | RMSE /m | MAPE/% | MAE /m | RMSE /m | |
| 保守型 | 8.44 | 4.85 | 7.78 | 2.98 | 1.57 | 2.05 |
| 谨慎型 | 7.01 | 4.50 | 5.71 | 1.98 | 1.29 | 1.92 |
| 冒险型 | 6.23 | 4.00 | 4.47 | 3.37 | 2.09 | 2.39 |
| 平均值 | 7.23 | 4.45 | 5.99 | 2.78 | 1.65 | 2.12 |
| 1 | World healthy organization.Road-traffic-injuries [EB/OL].https://www.who.int/zh/news-room/fact-sheets/detail/road-traffic-injuries. |
| 2 | 袁泉,于迪,肖睿轩,等.基于行为计划理论的行人心理风险影响特性 [J].汽车安全与节能学报,2020,11(4):511-517. |
| YUAN Quan,YU Di,XIAO Ruixuan,et al.The influence c-haracteristics of pedestrian mental risk image under the interaction of multiple factors [J].Automotive Safety and Energy,2020,11(4):511-517. | |
| 3 | 彭晓燕,谢浩,黄晶.无人驾驶汽车局部路径规划算法研究 [J].汽车工程,2020,42(1):1-10. |
| PENG Xiaoyan,XIE Hao,HUANG Jing.Research on local pa-th planning algorithm for unmanned vehicles [J]. Automotive Engineering,2020,42(1):1-10. | |
| 4 | NI D H.A unified perspective on traffic flow theory,part I:the field theory [J].Applied Mathematical Sciences,2013,7(39):1929-1946. |
| 5 | 王建强,吴剑,李洋.基于人-车-路协同的行车风险场概念、原理及建模 [J].中国公路学报,2016,29(1):105-114. |
| WANG Jianqiang,WU Jian,LI Yang.Concept,principle and modeling of driving risk field based on driver-vehicle-road interaction [J].China Journal of Highway and Transport,2016,29(1):105-114. | |
| 6 | 熊坚,施锦浩,万华森.人车路综合风险场模型构建及驾驶风格评估[J/OL].交通运输系统工程与信息,[2021-11-18],https://kns.cnki.net/kcms/detail/11.4520.U.20211117.1629.059.html |
| XIONG Jian,SHI Jinhao,WAN Huasen.Modeling of driver- vehicle-road integrated risk field and driving style assessment [J/OL].Journal of Transportation Systems Engineering and Information Tec-hnology,[2021-11-18],https://kns.cnki.net/kcms/detail/11.4520.U.20211117.1629.059.html. | |
| 7 | LI L H,GAN J,JI X K,et al.Dynamic driving risk potenti-al field model under the connected and automated vehicles enviro- nment and its application in car-following modeling [J].IEEE Transactions on Intelligent Transportation Systems,2020,27:3499-3512. |
| 8 | 朱乃宣,高振海,胡宏宇,等.基于交通风险评估的个性化换道触发研究 [J].汽车工程,2021,43(9):1314-1321. |
| ZHU Naixuan,GAO Zhenhai,HU Hongyu,et al.Research on personalized lane change triggering based on traffic risk assessment [J].Automotive Engineering,2021,43(9):1314-1321. | |
| 9 | 张家旭,王晨,赵健.基于改进人工势场法的汽车弯道超车路径规划与跟踪控制 [J].汽车工程,2021,43(4):547-552. |
| ZHANG Jiaxu,WANG Chen,ZHAO Jian.Path planning and t-racking control for vehicle overtaking on curve based on modified artificial potential field method [J].Automotive Engineering,2021,43(4):547-552. | |
| 10 | 黄俊达,杨大伟,毛琳.俯视邻近行人风险量化分析方法 [J].大连民族大学学报,2018.20(5):417-422. |
| HUANG Junda,YANG Dawei,MAO Lin.Top view risk quan-tification analysis method for approaching pedestrians [J].Journal of Dalian Minzu University,2018,20(5):417-422. | |
| 11 | 袁泉,晏楠飞,郝威.基于心理安全距离的行人风险评价及预警算法研究 [J/OL].中国公路学报,[2021-7-19],https://kns.cnki.net/kcms/detail/61.1313.u.20210719.1322.004.html |
| YUAN Quan,YAN Nanfei,HAO Wei.Research on pedestrian risk assessment and early warning algorithm based on psychological safety distance [J/OL].China Journ-al of Highway and Transport,[2021-7-19],https://kns.cnki.net/kcms/detail/61.1313.u.20210719.1322.004.html. | |
| 12 | 杨彪,范福成,杨吉成,等.基于动作预测与环境条件的行人过街意图识别 [J].汽车工程,2021,43(7):1067-1076. |
| YANG Biao, FAN Fucheng, YANG Jicheng, et al.Recognition of p- edestrians’ street-crossing intentions based on action prediction and environment context [J].Automotive Engineering,2021,43(7):1067-1076. | |
| 13 | STRASBURGER H.Seven myths on crowding and peripheral vision [J].i-Perception,2020,11(3):1-46. |
| 14 | 叶倩倩.基于社会力的人车混合交通模拟 [D].杭州:浙江大学,2018. |
| YE Qianqian.Mixed traffic simulation based on social force model [D].Hangzhou:Zhejiang University,2018. | |
| 15 | 朱冰,李伟男,汪震,等.基于随机森林的驾驶人驾驶习性辨识策略[J].汽车工程,2019,41(2):213-224. |
| ZHU Bing,LI Weinan,WANG Zhen,et al.Identification strat-egy of driving style based on random forest [J].Automotive Engineering,2019,41(2):213-224. |
| [1] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [2] | Naixuan Zhu,Zhenhai Gao,Hongyu Hu,Lü Ying,Weiguang Zhao. Research on Personalized Lane Change Triggering Based on Traffic Risk Assessment [J]. Automotive Engineering, 2021, 43(9): 1314-1321. |
| [3] | Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction [J]. Automotive Engineering, 2021, 43(6): 877-884. |
| [4] | Jiaxu Zhang,Chen Wang,Jian Zhao. Path Planning and Tracking Control for Vehicle Overtaking on Curve Based on Modified Artificial Potential Field Method [J]. Automotive Engineering, 2021, 43(4): 546-552. |
| [5] | Xiaojian Wu,Dong Yan,Aichun Wang,Juhua Huang,Lei Wu,Bing Zhou. Research on Improved Artificial Potential Field Path Planning Integrating Prediction of Preceding Vehicle Trajectory [J]. Automotive Engineering, 2021, 43(12): 1752-1761. |
| [6] | Li Yayong, Cai Yingfeng, Chen Long, Sun Xiaoqiang, He Youguo, Zhang Yunshun. ACC Method Considering Driving State of Front and Rear Vehicles [J]. Automotive Engineering, 2019, 41(8): 865-871. |