Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (9): 1314-1321.doi: 10.19562/j.chinasae.qcgc.2021.09.007
Previous Articles Next Articles
Naixuan Zhu1,Zhenhai Gao1,Hongyu Hu1( ),Lü Ying2,Weiguang Zhao1
),Lü Ying2,Weiguang Zhao1
Received:2021-07-12
Revised:2021-07-30
Online:2021-09-25
Published:2021-09-26
Contact:
Hongyu Hu
E-mail:huhongyu@jlu.edu.cn
Naixuan Zhu,Zhenhai Gao,Hongyu Hu,Lü Ying,Weiguang Zhao. Research on Personalized Lane Change Triggering Based on Traffic Risk Assessment[J].Automotive Engineering, 2021, 43(9): 1314-1321.
"

"
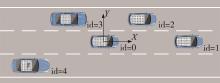
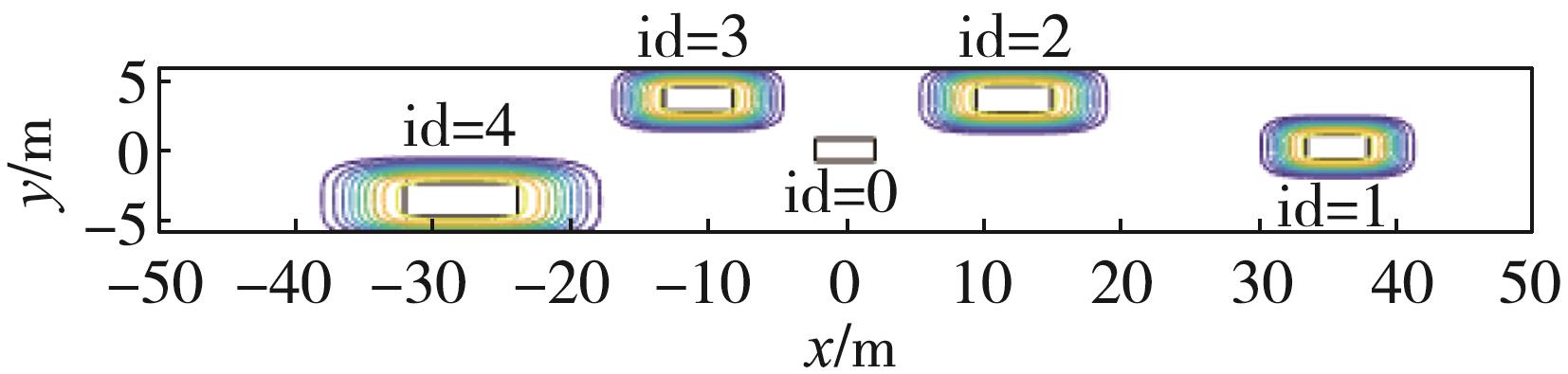
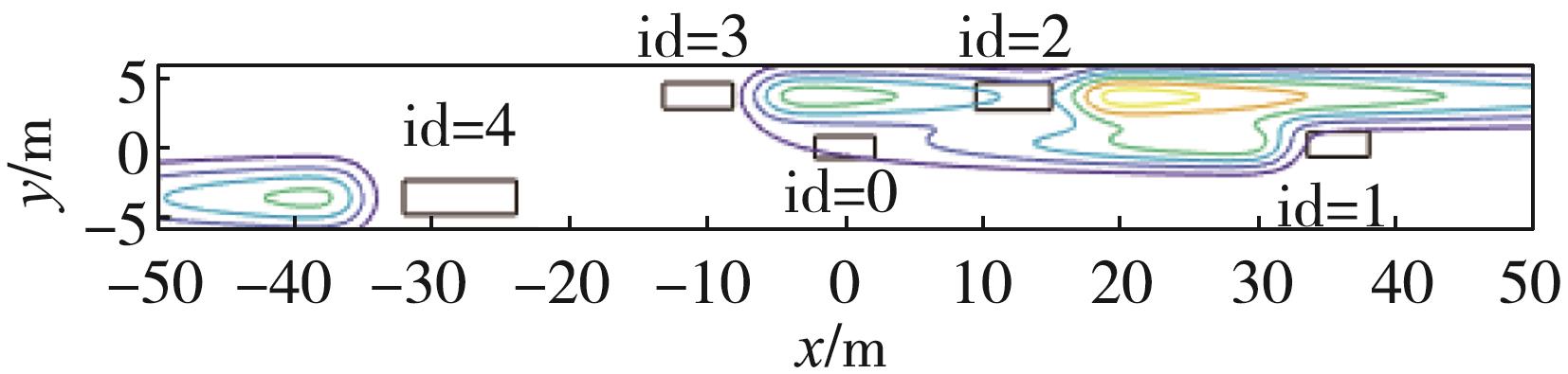
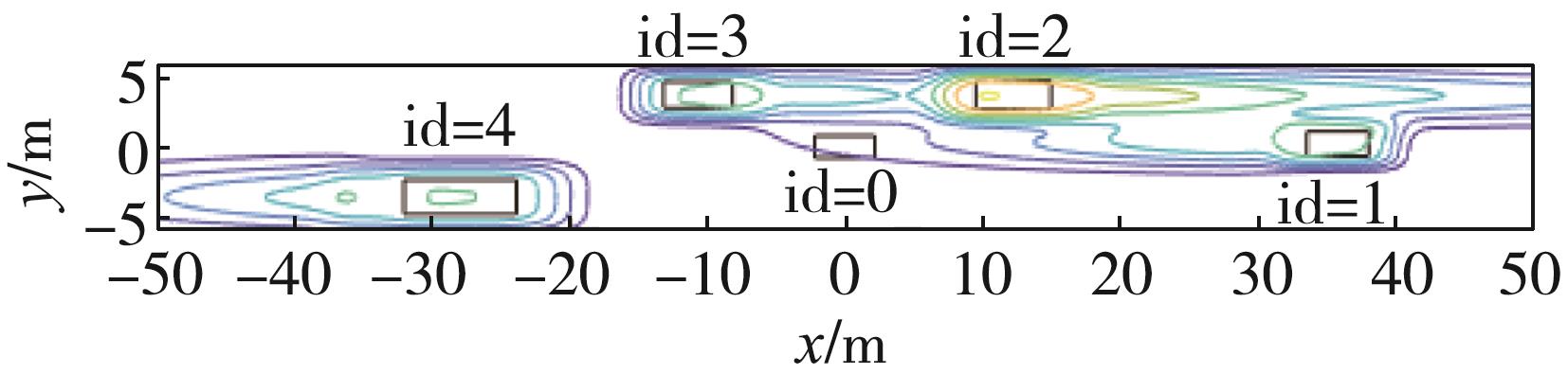
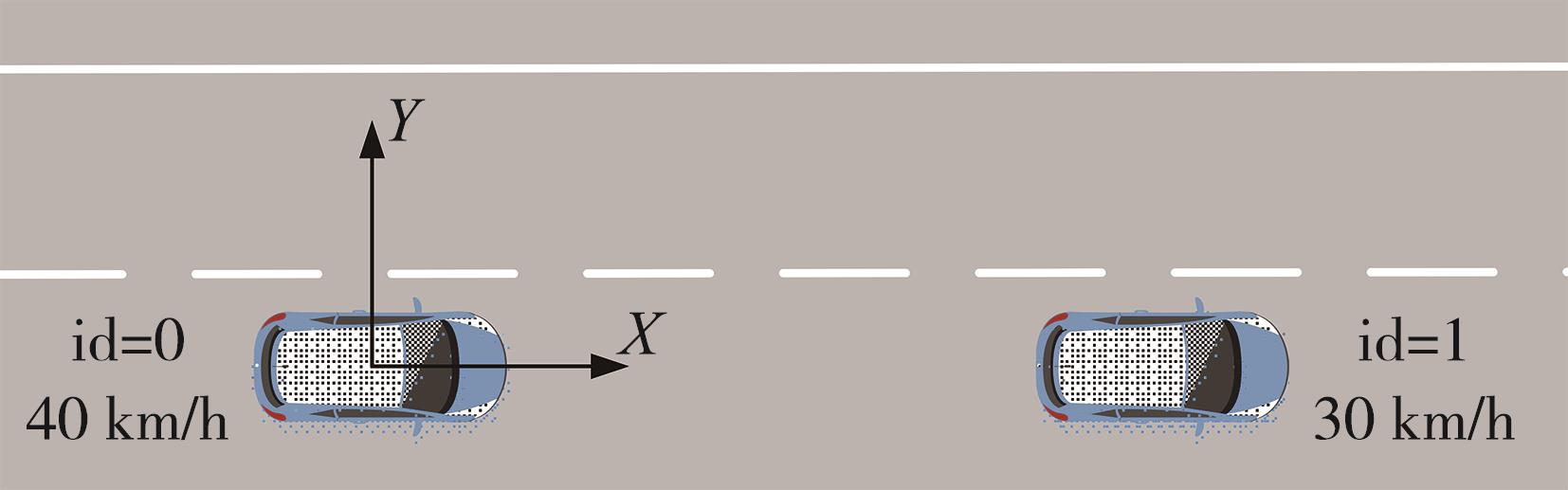
| id | X/m | Y/m | L/m | D/m | v/(m·s-1) |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 4.4 | 1.6 | 40 |
| 1 | 35.84 | 0.21 | 4.5 | 1.8 | 35 |
| 2 | 12.27 | 3.74 | 5.5 | 2.0 | 50 |
| 3 | -10.66 | 3.77 | 5 | 1.9 | 45 |
| 4 | -27.94 | -3.68 | 8.2 | 2.5 | 35 |
"
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 1 | 6 | ||
| 1 | 0.9 | ||
| 1 | 2 |

"
"

"
"

"
"
"
| 性别 | 平均年龄 | 平均驾龄/年 | 人数 |
|---|---|---|---|
| 男 | 29 | 6.5 | 23 |
| 女 | 24 | 2.3 | 7 |
"
"
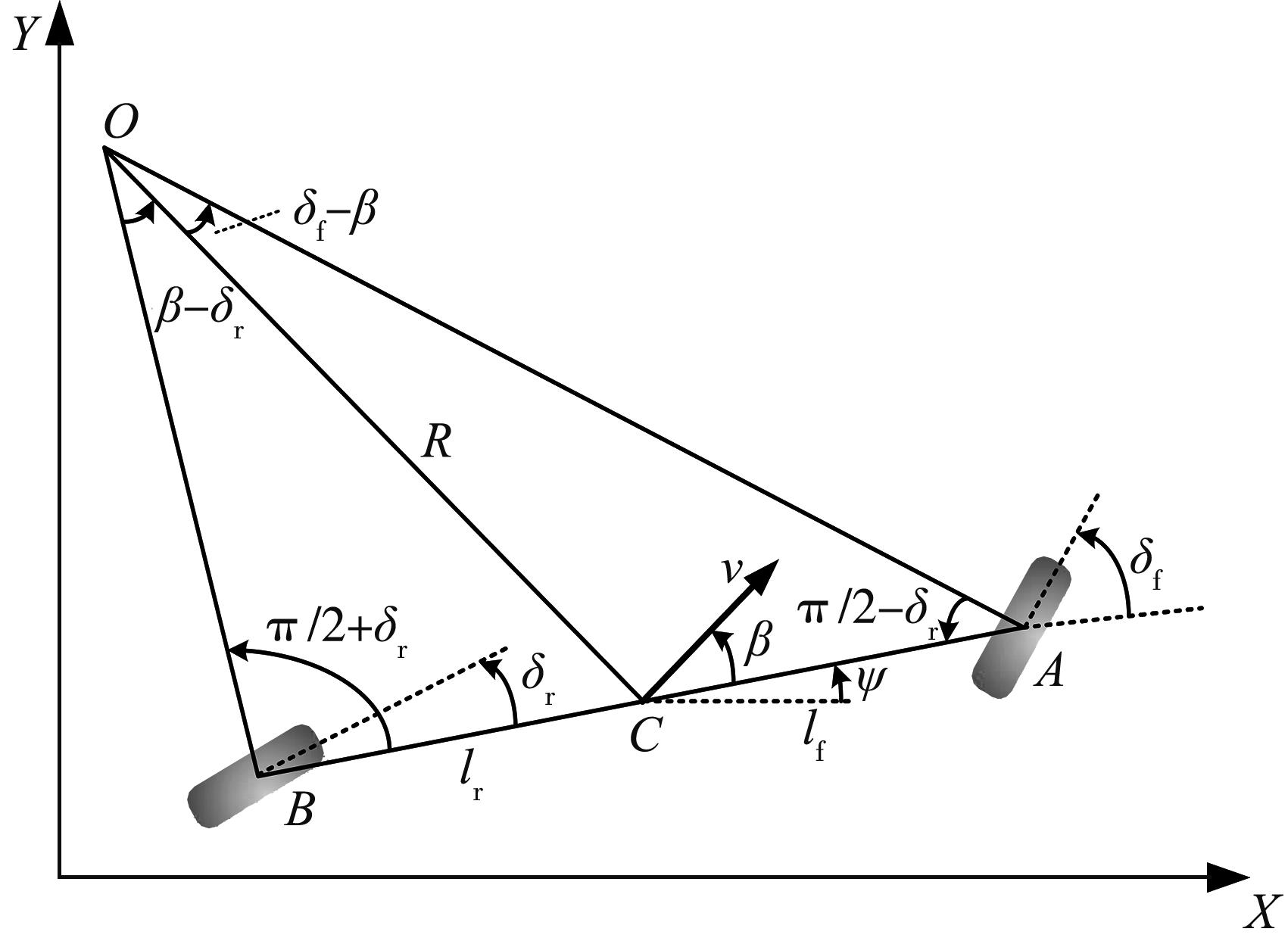
| 符号 | 含义 | 符号 | 含义 |
|---|---|---|---|
| A | 前轮中心 | B | 后轮中心 |
| C | 车辆质心 | O | 转向圆心 |
| v | 质心速度 | R | 转向半径 |
| 质心至后轴的距离 | 质心至前轴的距离 | ||
| 质心侧偏角 | 航向角 | ||
| 后轮侧偏角 | 前轮侧偏角 |

"


"

"
"
"
"
| 1 | GUPTA A, JOHNSON J, LI F F, et al. Social GAN: socially acceptable trajectories with generative adversarial networks[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2018. |
| 2 | VEMULA A, MUELLING K, OH J. Social attention: modeling attention in human crowds[C]. ICRA2018:1-7. |
| 3 | DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). IEEE, 2018. |
| 4 | LEE N, CHOI W, VERNAZA P, et al. Desire: distant future prediction in dynamic scenes with interacting agents[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 336-345. |
| 5 | MA Y, ZHU X, ZHANG S, et al. Trafficpredict: trajectory prediction for heterogeneous traffic⁃agents[C].Proceedings of the AAAI Conference on Artificial Intelligence, 2019, 33(1): 6120-6127. |
| 6 | MA Y, MANOCHA D, WANG W. Autorvo: local navigation with dynamic constraints in dense heterogeneous traffic[J]. arXiv preprint arXiv:, 2018. |
| 7 | SCHUBERT R, RICHTER E, WANIELIK G. Comparison and evaluation of advanced motion models for vehicle tracking[C]. Information Fusion, 2008 11th International Conference on. IEEE, 2008. |
| 8 | DEO N, RANGESH A, TRIVEDI M M. How would surround vehicles move? a unified framework for maneuver classification and motion prediction[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 129-140. |
| 9 | HOUENOU A, BONNIFAIT P, CHERFAOUI V, et al. Vehicle trajectory prediction based on motion model and maneuver recognition[C]. 2013 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2013: 4363-4369. |
| 10 | ZHAO T, XU Y, MONFORT M, et al. Multi⁃agent tensor fusion for contextual trajectory prediction[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 12126-12134. |
| 11 | JEON H, CHOI J, KUM D. Scale⁃net: scalable vehicle trajectory prediction network under random number of interacting vehicles via edge⁃enhanced graph convolutional neural network[C]. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020: 2095-2102. |
| 12 | 何立萍,王子滨.美国发展军民两用技术实例[J].激光技术,1997,3(5):21-26. |
| HE L P, WANG Z B. An example of the development of dual⁃use technology in the United States[J]. Laser Technology, 1997,3(5):21-26. | |
| 13 | 何友,王国宏,陆大琻,等.多传感器信息融合及应用[M].北京:电子工业出版社,2007: 1-12. |
| HE Y, WANG G H, LU D J, et al. Multi⁃sensor information fusion with application[M].Beijing: Electronic Industry Press, 2007: 1-12. | |
| 14 | ZHANG G, ZHENG N, CUI C, et al. An efficient road detection method in noisy urban environment[C]. 2009 IEEE Intelligent Vehicles Symposium. IEEE, 2009: 556-561. |
| 15 | NGUYEN T N, MICHAELIS B, Al⁃HAMADI A, et al. Stereo⁃camera⁃based urban environment perception using occupancy grid and object tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 13(1): 154-165. |
| 16 | HOMM F, KAEMPCHEN N, OTA J, et al. Efficient occupancy grid computation on the GPU with lidar and radar for road boundary detection[C]. 2010 IEEE Intelligent Vehicles Symposium. IEEE, 2010: 1006-1013. |
| 17 | AZIM A, DetectionAYCARD O. Classification and tracking of moving objects in a 3D environment[C]. 2012 IEEE Intelligent Vehicles Symposium. IEEE, 2012: 802-807. |
| 18 | GIPPS P G. A model for the structure of lane⁃changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. |
| 19 | 龙小强,谭云龙.微观仿真自主性车道变换模型[J].公路交通科技,2012,29(11):115-119. |
| LONG X Q, TANG Y L. Discretionary lane changing model in microscopic simulation[J]. Journal of Highway and Transportation Research and Development, 2012,29(11):115-119. | |
| 20 | KESTING A, TREIBER M, HELBING D. General lane⁃changing model MOBIL for car⁃following models[J]. Transportation Research Record Journal of the Transportation Research Board, 2007, 1999:86-94. |
| 21 | 金立生, BARTVAN A, 杨双宾, 等.高速公路汽车辅助驾驶安全换道模型[J].吉林大学学报,2009,39(3):582-586. |
| JIN L S, BARTVAN A, YANG S B, et al. Safety lane change model of vehicle assistant driving on highway[J]. Journal of Jilin University, 2009,39(3):582-586. | |
| 22 | CHANDRASIRI N P, NAWA K, ISHII A, et al. Driving skill analysis using machine learning the full curve and curve segmented cases[C]. 2012 12th International Conference on ITS Telecommunications. 2012:542-547. |
| 23 | BEJANI M M, GHATEE M. A context aware system for driving style evaluation by an ensemble learning on smartphone sensors data[J]. Transportation Research Part C: Emerging Technologies, 2018, 89:303-320. |
| 24 | ZHU B, YAN S, ZHAO J, et al. Personalized lane⁃change assistance system with driver behavior identification[J]. IEEE Transactions on Vehicular Technology, 2018, 67(11): 10293-10306. |
| 25 | SUZDALEVA E, NAGY I. An online estimation of driving style using data⁃dependent pointer model[J]. Transportation Research Part C: Emerging Technologies, 2018, 86:23-36. |
| 26 | LI G, LI S E, CHENG B, et al. Estimation of driving style in naturalistic highway traffic using maneuver transition probabilities[J]. Transportation Research Part C:Emerging Technologies, 2017, 74:113-125. |
| 27 | TANG X. Driving skill recognition: new approaches and their comparison[C]. 2009 American Control Conference, 2009:420-425. |
| 28 | ZHANG Y, LIN W C, CHIN Y K S. Data-driven driving skill characterization: algorithm comparison and decision fusion[C]. SAE Paper 2009-01-1286. |
| [1] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [2] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [3] | Zheng Zuo,Yunpeng Wang,Bin Ma,Bosong Zou,Yaoguang Cao,Shichun Yang. Quantitative Evaluation and Analysis of On-board Network Components Risk Rate Based on AFC-TARA [J]. Automotive Engineering, 2023, 45(9): 1553-1562. |
| [4] | Da Li,Junjun Deng,Zhaosheng Zhang,Peng Liu,Zhenpo Wang. Review on Power Battery Safety Warning Strategy in Electric Vehicles [J]. Automotive Engineering, 2023, 45(8): 1392-1407. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Xiang Gao,Long Chen,Xinye Wang,Xiaoxia Xiong,Yicheng Li,Yuexia Chen. Intelligent Vehicle Driving Risk Assessment Method Based on Trajectory Prediction [J]. Automotive Engineering, 2023, 45(4): 588-597. |
| [7] | Lü Yanzhi,Chao Wei,Yuanhao He. An End-to-End Lane Change Method for Autonomous Driving Based on GCN and CIL [J]. Automotive Engineering, 2023, 45(12): 2310-2317. |
| [8] | Shunchang Duan,Xianxu Bai,Qin Shi,Weihan Li,Guannan He. The Design of the Safety of the Intended Functionality of the Control Strategies for Vehicle Automatic Emergency Braking System [J]. Automotive Engineering, 2022, 44(9): 1305-1317. |
| [9] | Wenli Li,Kaiwen Xiao,Xiaohui Shi,Fenghua Liang,Ping Li. Pedestrian-Vehicle Micro-Interaction Model Based on Attention Field of Pedestrian Vision [J]. Automotive Engineering, 2022, 44(6): 808-820. |
| [10] | Bin Tang,Zhanxiang Xu,Haobin Jiang,Yingfeng Cai,Zitian Hu,Zhengyi Yang. Trajectory Planning of Intelligent Vehicles in Lane Change for Collision Avoidance Based on Segmented Optimization [J]. Automotive Engineering, 2022, 44(6): 831-841. |
| [11] | Hao Chen,Hong Wang,Weihan Li,Xianxu Bai,Jiong Chen,Chuzhao Li,Qin Shi,Jun Sun. Risk Assessment of Safety of the Intended Functionality Scenes Based on Driving Safety Field Theory [J]. Automotive Engineering, 2022, 44(11): 1636-1646. |
| [12] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [13] | Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction [J]. Automotive Engineering, 2021, 43(6): 877-884. |
| [14] | Jiaxu Zhang,Chen Wang,Jian Zhao. Path Planning and Tracking Control for Vehicle Overtaking on Curve Based on Modified Artificial Potential Field Method [J]. Automotive Engineering, 2021, 43(4): 546-552. |
| [15] | Xiaojian Wu,Dong Yan,Aichun Wang,Juhua Huang,Lei Wu,Bing Zhou. Research on Improved Artificial Potential Field Path Planning Integrating Prediction of Preceding Vehicle Trajectory [J]. Automotive Engineering, 2021, 43(12): 1752-1761. |