| 1 |
LI Wei, CUI Xiaowei, LU Mingquan. A robust graph optimization realization of tightly coupled GNSS/INS integrated navigation system for urban vehicles[J]. Tsinghua Science and Technology, 2018, 23(6): 724-732.
|
| 2 |
王鼎杰,孟德利,李朝阳,等. 抗野值自适应卫星/微惯性组合导航方法[J]. 仪器仪表学报, 2017, 38(12): 2952-2958.
|
|
WANG D L,MENG D L,LI Z Y,et al. Adaptively outlier-restrained GNSS/MEMS-INS integrated navigation method[J]. Chinese Journal of Scientific Instrument, 2017, 38(12): 2952-2958.
|
| 3 |
段续庭,田大新,王云鹏. 基于V2X通信网络的车辆协同定位增强方法[J]. 汽车工程, 2018, 40(8): 947-951, 959.
|
|
DUAN X T,TIAN D X,WANG Y P. Vehicle cooperative positioning enhancement method based on V2X communication networks[J]. Automotive Engineering, 2018, 40(8): 947-951, 959.
|
| 4 |
ROHANI M,GINGRAS D,VIGNERON V, et al. A new decentralized bayesian approach for cooperative vehicle localization based on fusion of GPS and Vanet based inter-vehicle distance measurement[J]. IEEE Intelligent Transportation Systems Magazine, 2015, 7(2): 85-95.
|
| 5 |
HOANG G M,DENIS B,HARRI J, et al. Bayesian fusion of Gnss, Its-g5 and Ir-uwb data for robust cooperative vehicular localization[J]. Comptes Rendus Physique, 2019, 20(3): 218-227.
|
| 6 |
ALAM N,BALAEI A T,DEMPSTER A G. Relative positioning enhancement in vanets: a tight integration approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 47-55.
|
| 7 |
TAHIR M,AFZAL S S,CHUGHTAI M S, et al. On the accuracy of inter-vehicular range measurements using GNSS observables in a cooperative framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(2): 682-691.
|
| 8 |
HOANG G M,DENIS B,HAERRI J, et al. Robust data fusion for cooperative vehicular localization in tunnels[C]. IEEE Intelligent Vehicles Symposium (IV).NewYork: IEEE,2017: 1372-1377.
|
| 9 |
ZHU B,TAO X,ZHAO J, et al. An integrated GNSS/UWB/DR/VMM positioning strategy for intelligent vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10842-10853.
|
| 10 |
ZHANG R,CHEN G,ZENG Q, et al. Single-site positioning method based on high-resolution estimation in VANET localization[J]. IEEE Access, 2018, 6: 54674-54682.
|
| 11 |
FAN Y,DING K,QI X, et al. Cooperative localization of 3D mobile networks via relative distance and velocity measurement[J]. IEEE Communications Letters, 2021, 25(9): 2899-2903.
|
| 12 |
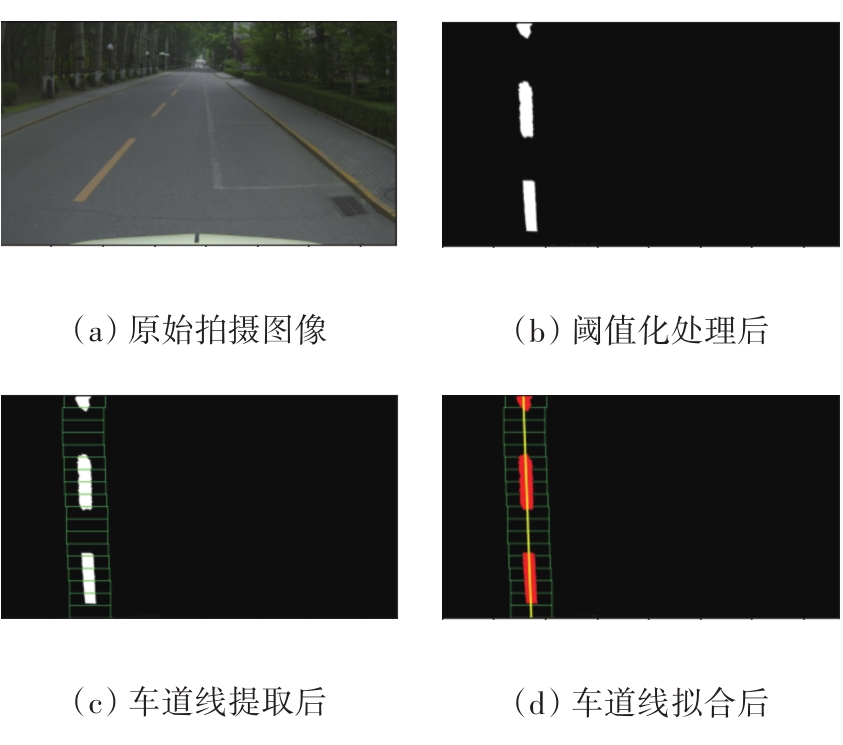
肖晶. 基于车载图像处理的道路检测技术研究[D]. 长沙: 湖南大学, 2016.
|
|
XIAO J. Research on road detection technology based on vehicular image[D]. Changsha: Hunan University, 2016.
|
| 13 |
WEI Jiang,YONG Li,RIZOS C, et al. Seamless indoor-outdoor navigation based on GNSS, INS and terrestrial ranging techniques[J]. Journal of Navigation, 2017, 70(6): 1183-1204.
|
| 14 |
GONZALEZ R,GIRIBET J I,PATINO H D. An approach to benchmarking of loosely coupled low-cost navigation systems[J]. Mathematical and Computer Modelling of Dynamical Systems, 2015, 21(3): 272-287.
|
 )
)