Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (7): 1212-1221.doi: 10.19562/j.chinasae.qcgc.2023.07.012
Special Issue: 底盘&动力学&整车性能专题2023年
Previous Articles Next Articles
Xiaoqiang Sun1( ),Yulin Wang1,Weiwei Hu1,Yingfeng Cai1,Long Chen1,Wong Pak Kin2
),Yulin Wang1,Weiwei Hu1,Yingfeng Cai1,Long Chen1,Wong Pak Kin2
Received:2022-04-25
Revised:2022-05-29
Online:2023-07-25
Published:2023-07-25
Contact:
Xiaoqiang Sun
E-mail:sxq@ujs.edu.cn
Xiaoqiang Sun, Yulin Wang, Weiwei Hu, Yingfeng Cai, Long Chen, Wong Pak Kin. Research on Estimation Strategy of Vehicle Driving State Based on Tire Piecewise Affine Identification Model[J].Automotive Engineering, 2023, 45(7): 1212-1221.
"
"
"
"
| PWA模型 | 仿射子模型参数 | PWA模型 | 仿射子模型参数 | ||||
|---|---|---|---|---|---|---|---|
| 低附路面 | -1 509.0 | 0.011 | -979.4 | 高附路面 | -0.115 | 779.5 | -460.0 |
| -949.7 | -0.312 | 2 091.0 | 0.124 | -1 233.0 | -441.7 | ||
| -907.3 | 0.197 | -1 835.0 | -0.263 | 1 504.0 | -258.3 | ||
| -589.1 | 0.490 | -3 005.0 | 0.256 | -968.2 | -172.2 | ||
| -262.3 | -0.654 | 1 559.0 | -0.216 | 1 428.2 | -338.0 | ||
| -512.6 | -0.572 | 2 783.3 | -0.010 | -232.2 | -685.7 | ||
| -960.9 | 0.367 | -3 754.0 | -0.302 | 752.2 | -120.0 | ||
| -293.8 | 0.620 | -1 873.0 | 0.264 | -538.1 | -120.2 | ||
| -1 276.0 | -0.184 | 1 226.2 | 0.223 | -1 377.0 | -266.4 | ||
| -763.1 | -0.458 | 2 948.0 | -0.289 | 1 107.4 | -170.5 | ||

"

"

"
"
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 2 350 |
| 前轮到质心距离lf /m | 1.337 |
| 后轮到质心距离lr/m | 1.587 |
| 轮距B/m | 1.53 |
| 质心到地面高度hg/m | 0.652 |
| 横摆转动惯量Iz /(kg·m2) | 4 386 |
"
"
"
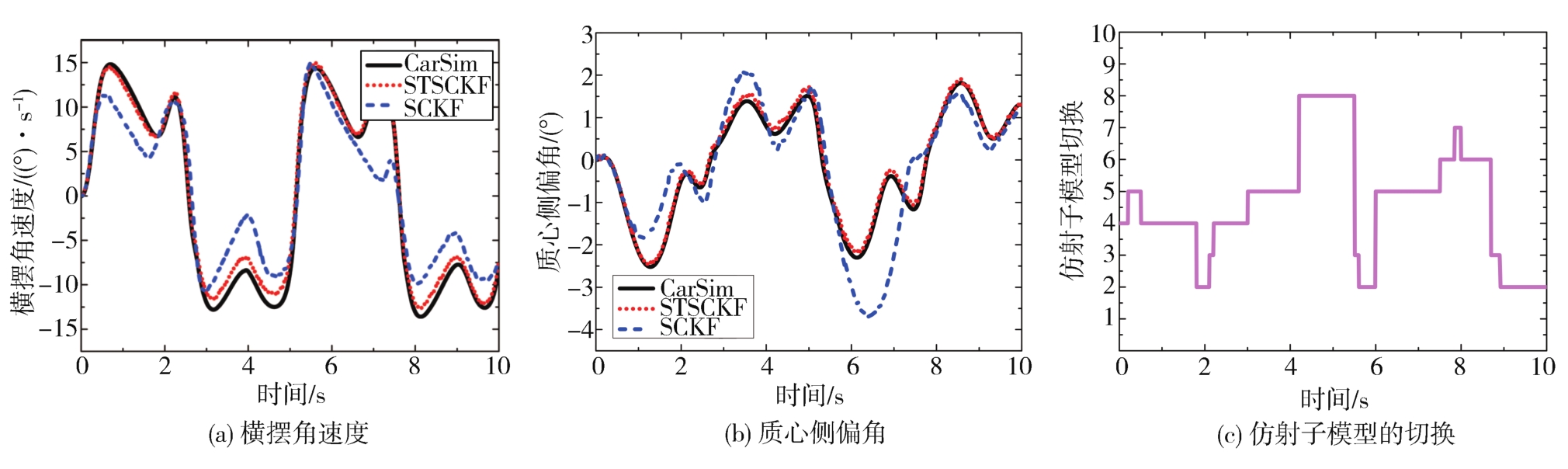
| 估计策略 | ? | ?βMAX | ? | ?βRMS |
|---|---|---|---|---|
| STSCKF(工况1) | 1.76 | 0.24 | 0.69 | 0.06 |
| SCKF(工况1) | 10.98 | 2.62 | 3.81 | 0.78 |
| STSCKF(工况2) | 0.94 | 0.08 | 0.25 | 0.02 |
| SCKF(工况2) | 5.24 | 0.14 | 1.02 | 0.14 |
"
"
| 1 | 王宪彬, 韩红, 施树明. 驾驶员预瞄时间与公路弯道半径的耦合特征[J]. 江苏大学学报(自然科学版), 2022, 43(3): 249-255. |
| WANG X, HAN H, SHI S. Coupling characteristics of driver preview time and road bend radius[J]. Journal of Jiangsu University (Natural Science Edit), 2022, 43(3): 249-255. | |
| 2 | 梁宝钰,汪怡平,刘珣,等.基于滑模理论的高速车辆侧风稳定性控制研究[J].汽车工程,2022,44(1):123-130. |
| LIANG B, WANG Y, LIU X, et al. Research on crosswind stability control of high speed vehicle based on sliding mode theory[J]. Automotive Engineering. 2022, 44(1):123-130. | |
| 3 | KANG C, LEE M, CHUNG S. Multirate lane-keeping system with kinematic vehicle model [J]. IEEE Transactions on Vehicular Technology 2018, 10:9211-9222. |
| 4 | 唐斌, 尹玥, 江浩斌, 等. 基于RMPC的商用车车道保持跟踪控制[J]. 江苏大学学报(自然科学版), 2022, 43(3): 256-262. |
| TANG B, YIN Y, JIANG H, et al. Lane tracking control of commercial vehicle based on RMPC[J]. Journal of Jiangsu University(Natural Science Edit), 2022, 43(3): 256-262. | |
| 5 | 李绍松,郭孔辉,仇韬,等.极限工况下主动前轮转向汽车稳定性控制[J].汽车工程,2020,42(2):191-198. |
| LI S, GUO K, CHOU T,et al. Stability control of active front wheel steering vehicle under extreme conditions[J].Automotive Engineering. 2020,42(2):191-198. | |
| 6 | YU H, MEIER K, ARGYLE M, et al. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles[J]. IEEE-ASME Transactions on Mechatronics, 2015, 2: 541-552. |
| 7 | SUN X, CAI Y, WANG S, et al. Piecewise affine identification of tire longitudinal properties for autonomous driving control based on data-driven[J]. IEEE Access, 2018, 6:47424-47432. |
| 8 | DIAS J, PEREIRA G, PALHARES R. Longitudinal model identification and velocity control of an autonomous car [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 2:776-786. |
| 9 | YAO Y, XU X, YANG D, et al. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 4: 3740-3747. |
| 10 | 张新锋,姚蒙蒙,宋瑞,等. 基于AEKPF算法对锂离子电池SOC与SOH的联合估计[J]. 江苏大学学报(自然科学版), 2022, 43(1): 24-31. |
| ZHANG X, YAO M, SONG R, et al. Joint estimation of SOC and SOH for Li-ion battery based on AEKPF algorithm[J]. Journal of Jiangsu University(Natural Science Edit), 2022, 43(1): 24-31. | |
| 11 | SABET M, DANIALI T, FATHI H, et al. Identification of an autonomous underwater vehicle hydrodynamic model using the extended, cubature, and transformed unscented Kalman filter[J]. IEEE Journal of Oceanic Engineering, 2018, 2:457-467. |
| 12 | CHEN T, CHEN L, CAI Y, et al. Robust sideslip angle observer with regional stability constraint for an uncertain singular intelligent vehicle system[J]. IET Control Theory and Applications,2018, 13. |
| 13 | WANG Z, WU J, LEI Z. Vehicle sideslip angle estimation for a four-wheel-independent-drive electric vehicle based on a hybrid estimator and a moving polynomial Kalman smoother[J]. Proceedings of the Institution of Mechanical Engineers Part K: Journal of Multi-body Dynamics, 2018. |
| 14 | LI L, YANG M, WANG C,et al. Rigid point set registration based on cubature Kalman filter and its application in intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2018, 6: 1754-1765. |
| 15 | GUO H, LIU F, XU F. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation[J]. IEEE Transactions on Systems Man Cybernetics-Systems,2017:1-12. |
| 16 | 谷先广,孟科委,姚鑫鑫,等.基于组合聚类的智能汽车横向稳定性判别方法[J].汽车工程,2020,42(11):1497-1505. |
| GU X, MENG K, YAO X, et al. Discrimination method of lateral stability of intelligent vehicle based on combined clustering[J]. Automotive Engineering. 2020,42(11):1497-1505. | |
| 17 | 张雷,赵宪华,王震坡.四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J].汽车工程,2020,42(11):1513-1521. |
| ZHANG L, ZHAO X, WANG Z. Research on coordinated control of trajectory tracking and yaw stability of electric vehicle independently driven by four-wheel hub motor[J]. Automotive Engineering,2020,42(11):1513-1521. | |
| 18 | WANG J, JIA X, LI Z.Research and implementationof short text clustering based on improved K-means algorithm[J]. Information Technology, 2019,12: 76-80. |
| 19 | LIU Z, HUANG W, WANG L. Field wheat ear counting automatically based on improved K-means clustering algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering, 2009,35,3: 174-181. |
| 20 | ZHU Y, ZOU X, HUANG X, et al. Rapid detecting total acid content and classifying different types of vinegar based on near infrared spectroscopy and least-squares support vector machine[J]. J. Appl. Solution Chem. Model., 2013,2(1):25-32. |
| 21 | SUN X, HU W, CAI Y, et al. Identification of a piecewise affine model for the tire cornering characteristics based on experimental data[J]. Nonlinear Dynamics, 2020,101. |
| 22 | 付翔, 杨凤举, 黄斌, 等. 主动后轮转向四轮独立驱动车辆的协调控制[J]. 江苏大学学报(自然科学版), 2021, 42(5): 497-505. |
| FU X, YANG F, HUANG B, et al. Coordinated control of active rear wheel steering and four wheel independent driving vehicle[J]. Journal of JIangsu University(Natural Science Edit), 2021, 42(5): 497-505. | |
| 23 | SUN X, WANG Y, HU W. Estimation of longitudinal force, sideslip angle and yaw rate for four-wheel independent actuated autonomous vehicles based on PWA tire model[J]. Sensors,2022,22(9). |
| 24 | ZHANG H, XIE J, GE J, et al. Adaptive strong tracking square-root cubature Kalman filter for maneuvering aircraft tracking[J]. IEEE Access, 2018, 6: 10052-10061. |
| 25 | 周聪,肖建.改进强跟踪滤波算法及其在汽车状态估计中的应用[J].自动化学报,2012,38(9):1520-1527. |
| ZHOU C, XIAO J. Improved strong tracking filtering algorithm and its application in vehicle state estimation[J]. Acta Automatica Sinica, 2012,38(9):1520-1527. | |
| 26 | 袁朝春, 宋金行, 何友国,等. 基于行人轨迹预测的无人驾驶汽车主动避撞算法[J]. 江苏大学学报(自然科学版), 2021, 42(1): 1-8. |
| YUAN C, SONG J, HE Y, et al. Active collision avoidance algorithm of autonomous vehicle based on pedestrian trajectory prediction[J]. Journal of Jiangsu University(Natural Science Edit), 2021, 42(1): 1-8. |
| [1] | Lin Hu,Ziyi Gu,Danqi Wang,Fang Wang,Tiefang Zou,Jing Huang. Current Status and Trend of Automotive Safety Procedures/Programs [J]. Automotive Engineering, 2024, 46(2): 187-200. |
| [2] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [3] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [4] | Pangwei Wang,Cheng Liu,Yunfeng Wang,Mingfang Zhang. Multi-lane Trajectory Optimization for Intelligent Connected Vehicles in Urban Road Network [J]. Automotive Engineering, 2024, 46(2): 241-252. |
| [5] | Xu Hao,Xiantao Lu,Jing Yang,Yali Zheng,Hewu Wang. Modeling on the Penetration Rate of China's Commercial Vehicle Market: Taking Heavy-Duty Long-Haul Trucks as an Example [J]. Automotive Engineering, 2024, 46(2): 253-259. |
| [6] | Weifeng Kong,Chuan Fang,Jihong Liu,Jianqiu Li,Feiqiang Li,Shengtao Huang,Xingwang Zhao,Yan Shi,Dian Yuan,Liangfei Xu,Peng Sun,Enfei Zhou,Minggao Ouyang. Research on Fuel Cell Cold Start Strategy Based on Single Cell Impedance Consistency Purging [J]. Automotive Engineering, 2024, 46(2): 260-268. |
| [7] | Nianzhong Zhang,Qiang Song,Guanfeng Wang,Mingsheng Wang. Research on Non-Current-Sensor Control of Permanent Magnet Synchronous Motor for Vehicle [J]. Automotive Engineering, 2024, 46(2): 281-289. |
| [8] | Jianfeng Chen,Qiang Wu,Xinyuan Ge,Jingbo Zhao. High-Performance Acquisition for Vehicle Sideslip Angle Based on Switch Strategy [J]. Automotive Engineering, 2024, 46(2): 346-355. |
| [9] | Zhipeng Jiao, Jian Ma, Xuan Zhao, Kai Zhang, Dean Meng, Qi Han, Zhao Zhang. Research on Short-Time Test Cycle and Method Based on Electric Vehicle Braking Safety Detection [J]. Automotive Engineering, 2024, 46(1): 109-119. |
| [10] | Jiangxin Yuan, Liping He, Yaodong Li, Gang Li. Thermal Analysis and Optimization Design of a BMS Slave Unit for Electric Vehicles [J]. Automotive Engineering, 2024, 46(1): 128-138. |
| [11] | Liqun Lyu, Long Xu, Hang Yin, Yang Yang, Yunshan Ge. Research on Real-World NO x Emission Analysis Methods for Heavy-Duty Diesel Vehicles [J]. Automotive Engineering, 2024, 46(1): 151-160. |
| [12] | Jun Ma, Yue Bai. Context-Engine-Based Interaction Design of In-Vehicle Navigation [J]. Automotive Engineering, 2024, 46(1): 18-28. |
| [13] | Biao Yang, Zhiwen Wei, Rongrong Ni, Hai Wang, Yingfeng Cai, Changchun Yang. Efficient Pedestrian Crossing Intention Anticipation Based on Action-Conditioned Interaction [J]. Automotive Engineering, 2024, 46(1): 29-38. |
| [14] | Pengbo Zhang, Renxiang Chen, Yiming Shao, Shizheng Sun, Kaibo Yan. Research Review of Fault Diagnosis for Electric Drive Powertrain System of Pure Electric Vehicles [J]. Automotive Engineering, 2024, 46(1): 61-74. |
| [15] | Zheng Zuo,Yunpeng Wang,Bin Ma,Bosong Zou,Yaoguang Cao,Shichun Yang. Quantitative Evaluation and Analysis of On-board Network Components Risk Rate Based on AFC-TARA [J]. Automotive Engineering, 2023, 45(9): 1553-1562. |
|