Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (2): 241-252.doi: 10.19562/j.chinasae.qcgc.2024.02.006
Previous Articles Next Articles
Pangwei Wang1,Cheng Liu1,Yunfeng Wang2( ),Mingfang Zhang1
),Mingfang Zhang1
Received:2023-06-14
Online:2024-02-25
Published:2024-02-23
Contact:
Yunfeng Wang
E-mail:wang.yf@rioh.cn
Pangwei Wang,Cheng Liu,Yunfeng Wang,Mingfang Zhang. Multi-lane Trajectory Optimization for Intelligent Connected Vehicles in Urban Road Network[J].Automotive Engineering, 2024, 46(2): 241-252.

"
"


"
"
| Q-learning算法 | |
|---|---|
| 1 | 初始化 |
| 2 | while ( |
| 3 | {选择初始状态s0,参考ε-greedy策略在状态 |
| 4 | while ( |
| 5 | {(1)参考ε-greedy策略在状态 |
| 6 | (2) |
| 7 | (3) |
| 8 | 最优换道策略 |

"

"
| 参数 | 设定值 |
|---|---|
| 权重系数w1 | 100 |
| 权重系数w2 | 50 |
| 权重系数w3 | 10 |
| 权重系数w4 | 200 |
| 权重系数w5 | 1 |
| 权重系数w6 | 5 |
| 权重系数w7 | 50 |
"


"
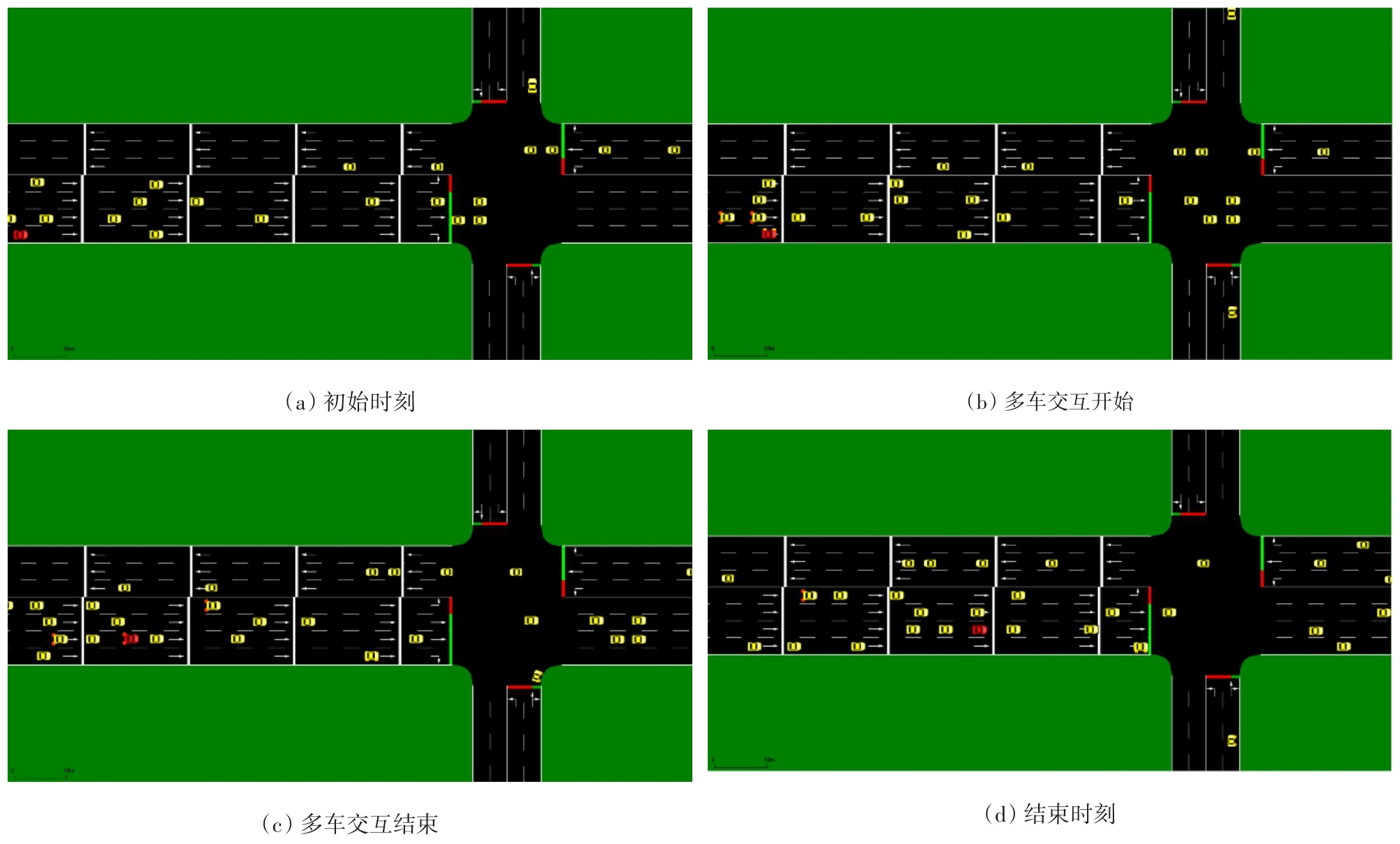

"

"

"
| 饱和度为0.6/0.8/1.0 | 基准仿真控制方法 | GPPA | 本文方法 |
|---|---|---|---|
| 平均值/s | 84.58/96.91/125.81 | 79.30/90.22/116.40 | 77.24/88.15/113.69 |
| 标准差 | 9.77/12.81/16.53 | 6.59/8.30/13.33 | 4.07/6.66/10.19 |
| 收益/% | 0.00/0.00/0.00 | 6.24/6.90/7.48 | 8.68/9.04/6.63 |
"


"


"
| 1 | 朱庆功, 刘俊女, 赵笑春, 等. 北京市轻型汽油车蒸发排放总量评估[J]. 中国环境科学, 2022, 42(3): 1066-1072. |
| ZHU Q G, LIU J N, ZHAO X C, et al. Estimation of light-duty vehicles total evaporative emissions in Beijing[J]. China Environmental Science, 2022, 42(3): 1066-1072. | |
| 2 | 《中国公路学报》编辑部.中国交通隧道工程学术研究综述·2022[J]. 中国公路学报, 2022, 35(4): 1-40. |
| Editorial Board of the China Journal of Highway and Transport. Review on China’s tunnel engineering research: 2022[J]. China Journal of Highway and Transport, 2022, 35(4): 1-40. | |
| 3 | LI B, ZHANG Y M, FENG Y H, et al. Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3): 340-350. |
| 4 | NOROUZI A, KAZEMI R, ABBASSI O R. Path planning and re-planning of lane change maneuvers in dynamic traffic environments[J]. International Journal of Vehicle Autonomous Systems, 2019, 14(3): 239-264. |
| 5 | 宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. |
| ZONG F, SHI P X, WANG M, et al. Connected and automated vehicle mixed-traffic car-following model considering states of multiple front and rear vehicles[J]. China Journal of Highway and transport, 2021, 34(7): 105-117. | |
| 6 | 崔洁茗, 余贵珍, 周彬, 等. 基于神经网络的车辆强制换道预测模型[J]. 北京航空航天大学学报, 2022, 48(5): 890-897. |
| CUI J M, YU G Z, ZHOU B, et al. Neural network-based prediction model for forced lane change of vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 890-897. | |
| 7 | HAO L, SUN B H, LI G, et al. The eco-driving considering coordinated control strategy for the intelligent electric vehicles[J]. IEEE Access, 2021, 9: 10686-10698. |
| 8 | YANG Z, FENG Y H, LIU H. A cooperative driving framework for urban arterials in mixed traffic conditions[J]. Transportation Research Part C: Emerging Technologies, 2021, 124. |
| 9 | 鲁工圆, 王超宇, 沈子力, 等.面向追踪间隔压缩的高速铁路列车运行时空轨迹优化[J]. 铁道学报, 2021, 43(7): 10-18. |
| LU G Y, WANG C Y, SHEN Z L, et al. Headway compression oriented space-time trajectory optimization for high-speed railway trains[J]. Journal of the China Railway Society, 2021, 43(7): 10-18. | |
| 10 | 赵蒙, 于梦琦, 胡祥培.新零售背景下药品协同配送优化研究[J]. 系统工程理论与实践, 2021, 41(2): 297-309. |
| ZHAO M, YU M Q, HU X P. Optimization scheduling method of drug collaborative distribution under the background of new retail[J]. System Engineering – Theory & Practice, 2021, 41(2): 297-309. | |
| 11 | LOIS D, WANG Y, BOGGIO-MARZET A, et al. Multivariate analysis of fuel consumption related to eco-driving: interaction of driving patterns and external factors[J]. Transportation Research Part D: Transport and Environment, 2019, 72: 232-242. |
| 12 | 赵祥模, 张心睿, 王润民, 等. 网联交叉口信号-车辆轨迹协同优化控制方法[J]. 汽车工程, 2021, 43(11): 1577-1586. |
| ZHAO X M, ZHANG X R, WANG R M, et al. Cooperative optimization control method of traffic signals and vehicle trajectories at connected intersection[J]. Automotive Engineering, 2021, 43(11): 1577-1586. | |
| 13 | FONSECA J C, GABRIELA C S, NETO J M, et al. A multi-agent system for solving the dynamic capacitated vehicle routing problem with stochastic customers using trajectory data mining[J]. Expert Systems with Applications, 2022, 195, June 1. |
| 14 | KÜHLMORGEN S, LU H, FESTAG A, et al. Evaluation of congestion-enabled forwarding with mixed data traffic in vehicular communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 233-247. |
| 15 | REINOLSMANN N, ALHAJYASEEN W, BRIJS T, et al. Investigating the impact of dynamic merge control strategies on driving behavior on rural and urban expressways-a driving simulator study[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 65: 469-484. |
| 16 | WEI Y, AVCI C, LIU J, et al. Dynamic programming-based multi-vehicle longitudinal trajectory optimization with simplified car following models[J]. Transportation Research Part B: Methodological, 2017, 106: 102-129. |
| 17 | TANVIR S, CHASE R, ROUPAHIL N. Development and analysis of eco-driving metrics for naturalistic instrumented vehicles[J]. Journal of Intelligent Transportation Systems, 2021, 25(3): 235-248. |
| 18 | 王庞伟, 于洪斌, 张为, 等. 城市车路协同系统下实时交通状态评价方法[J]. 中国公路学报, 2019, 32(6): 176-187. |
| WANG P W, YU H B, ZHANG W, et al. Real-time traffic status evaluation method for urban cooperative vehicle infrastructure system[J]. China Journal of Highway and Transport, 2019, 32(6): 176-187. | |
| 19 | LI L, GAN J, ZHOU K, et al. A novel lane-changing model of connected and automated vehicles: using the safety potential field theory[J]. Physica A: Statistical Mechanics and Its Applications, 2020, 559: 125039. |
| 20 | WANG P W, WANG Y F, WANG X, et al. An intelligent actuator of an indoor logistics system based on multi-sensor fusion[J]. Actuators, 2021, 10(6): 120. |
| 21 | 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33(7): 156-166. |
| HUANG L, GUO H C, ZHANG R H, et al. LSTM-based lane-changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33(7): 156-166. | |
| 22 | YAO H D, LI X P. Lane-change-aware connected automated vehicle trajectory optimization at a signalized intersection with multi-lane roads[J]. Transportation Research Part C: Emerging Technologies, 2021, 129. |
| 23 | PATLE B K, JHA A, PANDEY A, et al. The optimized path for a mobile robot using fuzzy decision function[J]. Materials Today: Proceedings, 2019, 18(7): 3575-3581. |
| 24 | LIU Y, ZHANG X J, GUAN X M, et al. Adaptive sensitivity decision based path planning algorithm for unmanned aerial vehicle with improved particle swarm optimization[J]. Aerospace Science and Technology, 2016(58): 92-102. |
| 25 | 张哲, 丁海涛, 张袅娜, 等.智能网联电动汽车经济性巡航速度规划[J]. 汽车工程, 2022, 44(4): 609-616,637. |
| ZHANG Z, DING H T, ZHANG N N, et al. Economic cruising speed planning of intelligent network connected electric vehicle[J]. Automotive Engineering, 2022, 44(4): 609-616,637. | |
| 26 | WANG P W, DENG H, ZHANG J, et al. Model predictive control for connected vehicle platoon under switching communication topology[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7817-7830. |
| 27 | 王树凤,孙文盛,刘宗锋.车辆稳定换道时的侧向加速度分析[J].机械设计与制造, 2020, 7: 17-20,24. |
| WANG S F, SUN W S, LIU Z F. Analysis on lateral acceleration of lane changing in vehicle stability[J]. Machinery Design & Manufacture, 2020, 7:17-20,24. | |
| 28 | SWIDAN H. Integrating AIMSUN micro simulation model with portable emissions measurement system (PEMS): calibration and validation case study[D]. North Carolina State University, 2011. |
| 29 | AKCELIK R. Efficiency and drag in the power-based model of fuel consumption[J]. Transportation Research Part B: Methodological, 1989, 23(5): 376-385. |
| [1] | Zheng Zuo,Yunpeng Wang,Bin Ma,Bosong Zou,Yaoguang Cao,Shichun Yang. Quantitative Evaluation and Analysis of On-board Network Components Risk Rate Based on AFC-TARA [J]. Automotive Engineering, 2023, 45(9): 1553-1562. |
| [2] | Gang Wang,Kunpeng Li,Hui Jing,Suqi Liu. Parameter-Free H∞ Control of Vehicle Active Suspension Based on Q-learning [J]. Automotive Engineering, 2023, 45(12): 2260-2271. |
| [3] | Lijun Qian,Chen Chen,Jian Chen,Xinyu Chen,Chi Xiong. Discrete Platoon Control at an Unsignalized Intersection Based on Q-learning Model [J]. Automotive Engineering, 2022, 44(9): 1350-1358. |
| [4] | Pengfei Li,Yugong Luo,Chang Liu,Weiwei Kong. Control Strategies Design of Intelligent and Connected Vehicle Platoon Under Emergency Conditions [J]. Automotive Engineering, 2022, 44(3): 299-307. |
| [5] | Yisong Chen,Yunxiang Xing,Xiaoqin Xiong,Libo Lan,Ying Cao,Yongtao Liu. Research on Technical and Economic Evaluation System of Intelligent Connected Vehicles Based on Patent Analysis [J]. Automotive Engineering, 2021, 43(9): 1271-1277. |
| [6] | Li Keqiang, Chang Xueyang, Li Jiawen, Xu Qing, Gao Bolin, Pan Jian. Cloud Control System for Intelligent and Connected Vehicles and Its Application [J]. Automotive Engineering, 2020, 42(12): 1595-1605. |
| [7] | Yan Gang, Xiao Kun, Chu Wenbo. Research on Virtualization Technology for ComputingPlatform of Intelligent Connected Vehicles [J]. Automotive Engineering, 2020, 42(1): 33-37. |
|