Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (3): 402-411.doi: 10.19562/j.chinasae.qcgc.2025.03.002
Ziniu Hu1,Xinpeng Chen1,Zeyu Yang1,2( ),Ziyun Yu1,Hongmao Qin1,Ming Gao1
),Ziyun Yu1,Hongmao Qin1,Ming Gao1
Received:2024-08-14
Revised:2024-09-14
Online:2025-03-25
Published:2025-03-21
Contact:
Zeyu Yang
E-mail:yangzeyu@wion.org
Ziniu Hu,Xinpeng Chen,Zeyu Yang,Ziyun Yu,Hongmao Qin,Ming Gao. Path Planning with Multiple Obstacle-Avoidance Modes for Intelligent Vehicles[J].Automotive Engineering, 2025, 47(3): 402-411.
"
"


"
"

"
"

"

"
"
| 参数 | 数值 |
|---|---|
| 拓展步长S/m | 2 |
| 最大前轮转向角 | 30 |
| 最小前轮转向角 | -30 |
| 前轮转角离散数量N | 5 |
| 轴距L/m | 2.92 |
| 轮距 | 1.6 |
| 最小离地间隙H/m | 0.15 |
| 轮宽 | 0.246 |
| 轮长 | 0.635 |
| 安全阈值 | 0.3,0.1,0.05 |
| 代价函数权重 | 0.95,2.75,20 |
| 代价函数权重α | 0.01,0.2,0.001 |
"


"
"
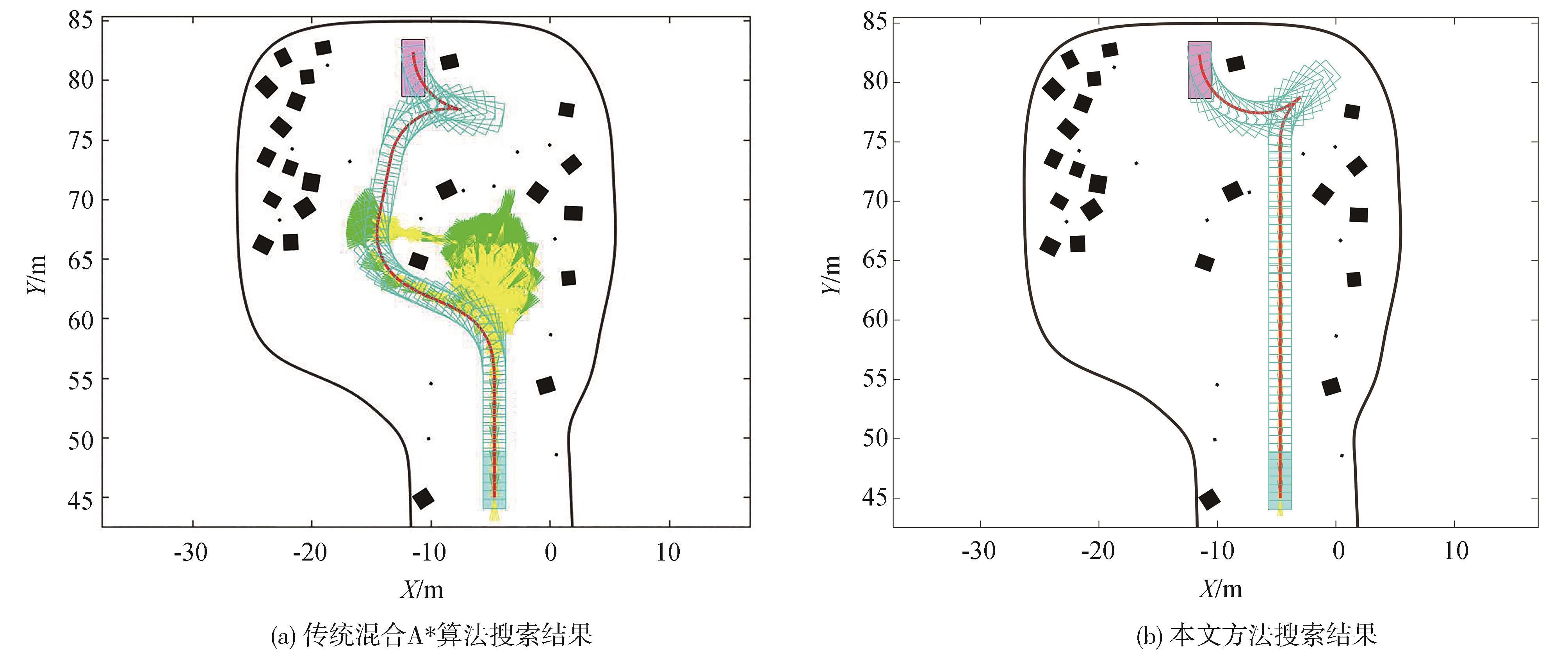
| 场景 | 算法种类 | 路径长度/m | 路径曲率变化量累加值/m-1 | 拓展节点数量 | 搜索耗时/ms |
|---|---|---|---|---|---|
| 狭窄通道场景 | 传统方法 | 43.12 | 30.24 | 92 | 75 |
| 本文方法 | 42.91 | 26.70 | 43 | 61 | |
| 开阔区域场景 | 传统方法 | 58.62 | 49.38 | 522 | 189 |
| 本文方法 | 46.51 | 36.42 | 81 | 93 |
"
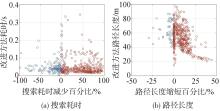
| 算法种类 | 平均搜索耗时/s | 平均路径长度/m |
|---|---|---|
| 传统方法 | 0.126 | 58.37 |
| 本文方法 | 0.055 | 54.29 |
"

"

"

"

"
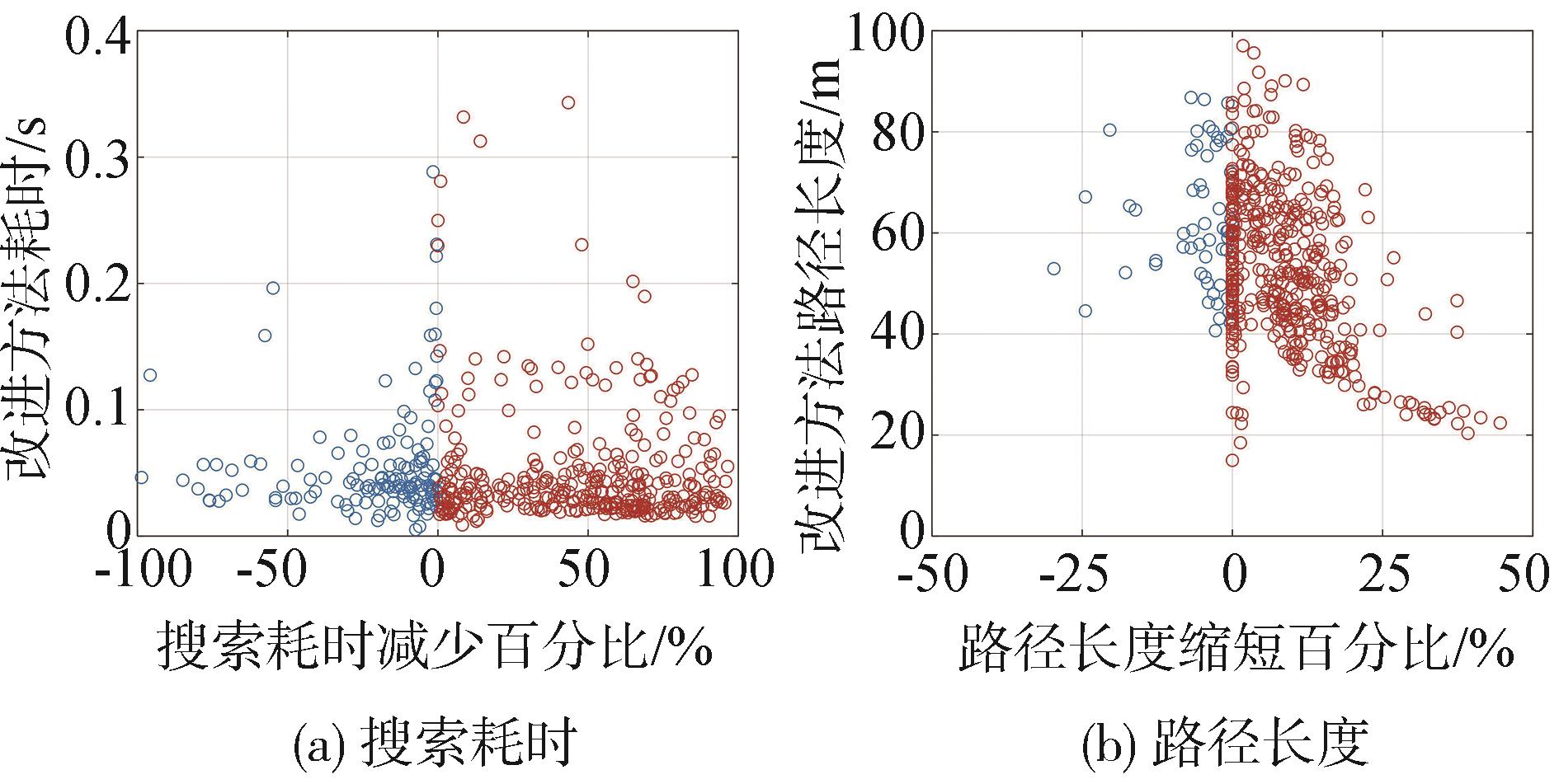
| 算法种类 | 路径长度/m | 路径曲率变化量累加值/m-1 | 拓展节点数量 | 搜索耗时/ms |
|---|---|---|---|---|
| 传统方法 | 39.03 | 6.26 | 547 | 239.19 |
| 本文方法 | 38.53 | 6.91 | 137 | 52.10 |
"
"

"
| 1 | 王雪柠,李骏辉,翟媛.我国智能汽车产业发展环境分析[J].汽车工业研究,2023(4):8-10. |
| WANG X N, LI J H, ZHAI Y. Analysis of the development environment of intelligent automobile industry in China[J]. Automotive Industry Research, 2023(4): 8-10. | |
| 2 | LI L, XU Z G, ZHAO X M, et al. Review of motion planning methods of intelligent connected vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 20-33. |
| 3 | WANG N, LI X, ZHANG K H, et al. A survey on path planning for autonomous ground vehicles in unstructured environments[J]. Machines, 2024, 12(1): 31. |
| 4 | 朱冰,贾士政,赵健,等.自动驾驶车辆决策与规划研究综述[J].中国公路学报,2024, 37(1): 215-240. |
| ZHU B, JIA S Z, ZHAO J, et al. Review of research on decision-making and planning for automated vehicles[J]. China Journal of Highway and Transport, 2024, 37(1): 215-240. | |
| 5 | LI Yanjie, WEI Wu, GAO Yong, et al. PQ-RRT*: an improved path planning algorithm for mobile robots[J]. Expert Systems with Applications, 2020, 152: 113425. |
| 6 | 朱冰,韩嘉懿,赵健,等.基于安全场改进RRT*算法的智能汽车路径规划方法[J].汽车工程,2020, 42(9): 1145-1150. |
| ZHU B, HAN J Y, ZHAO J, et al. Safety field-based improved RRT* algorithm for path planning of intelligent vehicle[J]. Automotive Engineering, 2020, 42(9): 1145-1150. | |
| 7 | ZHENG L, ZENG P Y, YANG W, et al. Bézier curve-based trajectory planning for autonomous vehicles with collision avoidance[J]. IET Intelligent Transport Systems, 2020, 14(13): 1882-1891. |
| 8 | 胡杰,张敏超,徐文才,等.自动驾驶车辆的平行泊车轨迹规划[J].汽车工程,2022, 44(3): 330-339. |
| HU J, ZHANG M C, XU W C, et al. Parallel parking trajectory planning for autonomous vehicles[J]. Automotive Engineering, 2022, 44(3): 330-339. | |
| 9 | 刘凯,龚建伟,陈舒,等.高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J].机械工程学报,2018, 54(14):141-151. |
| LIU K, GONG J W, CHEN S, et al. Dynamic modeling analysis of optimal motion planning and control for high-speed self-driving vehicles[J]. Journal of Mechanical Engineering, 2018, 54(14):141-151. | |
| 10 | LI G, ZHANG X, GUO H, et al. Real-time optimal trajectory planning for autonomous driving with collision avoidance using convex optimization[J]. Automotive Innovation, 2023, 6(3): 481-491. |
| 11 | DIJKSTRA E W. A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1(1): 269-271. |
| 12 | PALIWAL P. A survey of a-star algorithm family for motion planning of autonomous vehicles[C]. 2023 IEEE International Students’ Conference on Electrical, Electronics and Computer Science (SCEECS), 2023: 1-6. |
| 13 | DOLGOV D, THRUN S, MONTEMERLO M, et al. Practical search techniques in path planning for autonomous driving[J]. Ann Arbor, 2008, 1001(48105): 18-80. |
| 14 | QIN Z, CHEN X, HU M, et al. A novel path planning methodology for automated valet parking based on directional graph search and geometry curve[J]. Robotics and Autonomous Systems, 2020, 132: 103606. |
| 15 | 任秉韬,王淅淅,邓伟文,等.基于混合A*和可变半径RS曲线的自动泊车路径优化方法[J].中国公路学报,2022, 35(7): 317-327. |
| REN B T, WANG X X, DENG W W, et al. Path optimization algorithm for automatic parking based on hybrid A* and reeds-shepp curve with variable radius[J]. China Journal of Highway and Transport, 2022, 35(7): 317-327. | |
| 16 | 胡满江,牟斌杰,杨泽宇,等.基于DBSCAN与二分法的混合A*路径规划方法[J].汽车工程,2023, 45(3): 341-349,371. |
| HU M J, MOU B J, YANG Z Y, et al. A hybrid A* path planning method based on DBSCAN and dichotomy[J]. Automotive Engineering, 2023, 45(3): 341-349,371. | |
| 17 | ZHANG Y, CHEN G, HU H, et al. Hierarchical parking path planning based on optimal parking positions[J]. Automotive Innovation, 2023, 6(2): 220-230. |
| 18 | WILNERS J S, DANIEL G A, JUAN D H. Online 3-dimensional path planning with kinematic constraints in unknown environments using hybrid A* with tree pruning[J]. Sensors, 2021, 21(4):1152. |
| [1] | Shuo Zhang,Shiqi Kuang,Xuan Zhao,Yisong Chen,Qiang Yu,Man Yu. Research on Global Oriented Path Planning Fusion Algorithm for Intelligent Vehicles [J]. Automotive Engineering, 2024, 46(9): 1546-1555. |
| [2] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [3] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [4] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [5] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
| [6] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |
| [7] | Minghui Ren,Jun Liang,Long Chen,Chun Zhang,Yun Wang. Multi-AGV Path Planning for Intelligent Garage Based on Improved Conflict Search [J]. Automotive Engineering, 2023, 45(10): 1933-1943. |
| [8] | Jie Hu,Linglei Zhu,Ruinan Chen,Xinkai Zhong,Wencai Xu,Minchao Zhang. Research on Parallel Parking Path Planning Method for Narrow Parking Space [J]. Automotive Engineering, 2022, 44(7): 1040-1048. |
| [9] | Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking [J]. Automotive Engineering, 2021, 43(7): 987-994. |
| [10] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [11] | Xudong Zhang,Fukang Xu,Yuan Zou,Ningyuan Guo,Yu Zhang. A Local Path Planning Algorithm for Intelligent Wheeled Vehicle Combining TangentBug and Dubins Path [J]. Automotive Engineering, 2021, 43(6): 833-841. |
| [12] | Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction [J]. Automotive Engineering, 2021, 43(6): 877-884. |
| [13] | Lin Hu,Denghui Zhou,Jing Huang,Ronghua Du,Xin Zhang. Optimal Path Planning for Electric Vehicle with Consideration of Traffic Light and Energy Consumption [J]. Automotive Engineering, 2021, 43(5): 641-649. |
| [14] | Jiaxu Zhang,Chen Wang,Jian Zhao. Path Planning and Tracking Control for Vehicle Overtaking on Curve Based on Modified Artificial Potential Field Method [J]. Automotive Engineering, 2021, 43(4): 546-552. |
| [15] | Jiaxu Zhang,Chen Wang,Chong Guo,Fei Teng,Dongran Li. column:Vehicle Parallel Parking Path Planning Based on Adaptive Neuro⁃fuzzy Inference System [J]. Automotive Engineering, 2021, 43(3): 323-329. |
|
||