Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (10): 1872-1884.doi: 10.19562/j.chinasae.qcgc.2025.10.003
Wenguang Wu1( ),Songjiang Qiu1,Lin Hu1,Xiaoqiang Zhang2,Zenghua Qiu3,Jiakai Wang1
),Songjiang Qiu1,Lin Hu1,Xiaoqiang Zhang2,Zenghua Qiu3,Jiakai Wang1
Received:2025-03-28
Revised:2025-05-05
Online:2025-10-25
Published:2025-10-20
Contact:
Wenguang Wu
E-mail:wwglq@csust.edu.cn
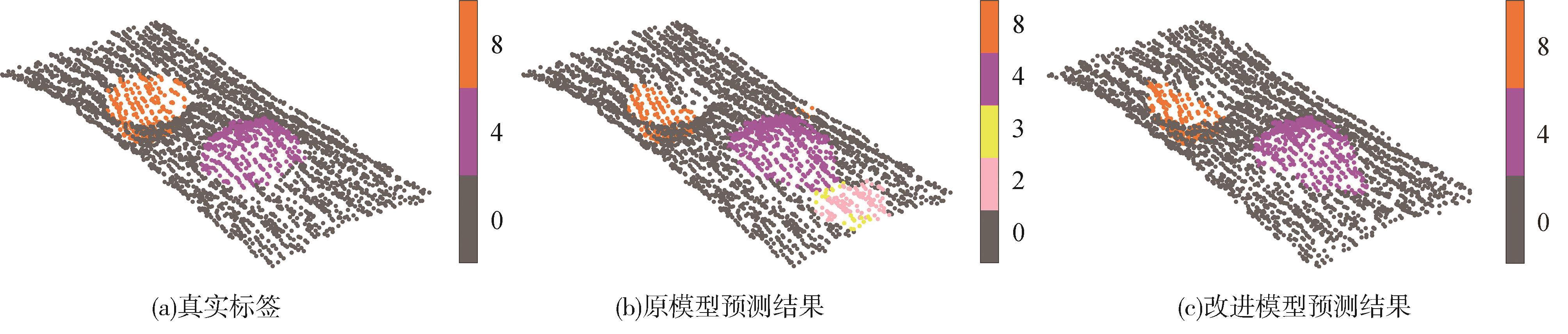
Wenguang Wu,Songjiang Qiu,Lin Hu,Xiaoqiang Zhang,Zenghua Qiu,Jiakai Wang. Unpaved Road Unevenness Recognition and Driving Risk Model Construction Based on the Improved Pointnet++[J].Automotive Engineering, 2025, 47(10): 1872-1884.
"
"
"
"
"
"
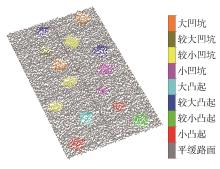
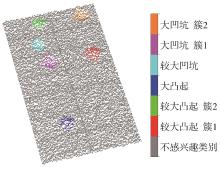
| 类型 | 标签 | 最大幅值范围(深度为负,高度为正)/m | 占比/% |
|---|---|---|---|
| 平缓路面 | 0 | -0.05~0.05 | 86.9 |
| 小凸起 | 1 | 0.05~0.15 | 1.6 |
| 较小凸起 | 2 | 0.15~0.25 | 1.7 |
| 较大凸起 | 3 | 0.25~0.35 | 1.6 |
| 大凸起 | 4 | >0.35 | 1.7 |
| 小凹坑 | 5 | -0.15~-0.05 | 1.6 |
| 较小凹坑 | 6 | -0.25~-0.15 | 1.6 |
| 较大凹坑 | 7 | -0.35~-0.25 | 1.6 |
| 大凹坑 | 8 | <-0.35 | 1.6 |
"
"
| 项目 | 参数 | 数值 |
|---|---|---|
| 训练相关 | 样本数量 | 3 500 |
| 批尺寸 | 16 | |
| 训练轮次 | 251 | |
| 初始学习率 | 0.001 | |
| 学习衰减步长 | 20 | |
| 学习衰减率 | 0.5 | |
| 采样点数量 | 4 200 |
"
| 算法模型 | mIoU/% | OA/% | mAcc/% | P | R | 模型体积/MB |
|---|---|---|---|---|---|---|
| PointNet | 55.2 | 89.4 | 56.9 | 68.9 | 56.9 | 95.5 |
| PointNet++(ssg) | 72.4 | 94.6 | 73.0 | 78.8 | 73.0 | 16.2 |
| Point Transformer | 73.6 | 94.4 | 73.3 | 79.0 | 73.7 | 222.0 |
| PointMLP | 73.7 | 96.2 | 71.2 | 80.1 | 71.8 | 192.0 |
| GDANet | 75.3 | 96.0 | 73.7 | 82.4 | 73.7 | 6.8 |
| PointNet++(msg) | 78.0 | 95.5 | 79.4 | 79.7 | 75.1 | 20.2 |
| 本文方法 | 83.7 | 96.4 | 80.4 | 85.0 | 81.5 | 27.1 |

"

"


"

"

"

"
"
实验 序号 | 感受野缩小 | 焦点损失函数 | KAN 网络 | mAcc / % | mIoU / % |
|---|---|---|---|---|---|
| 1 | 79.4 | 78.0 | |||
| 2 | √ | 79.6 | 80.6 | ||
| 3 | √ | 79.5 | 80.3 | ||
| 4 | √ | 79.7 | 80.8 | ||
| 5 | √ | √ | 80.1 | 81.6 | |
| 6 | √ | √ | 80.0 | 82.5 | |
| 7 | √ | √ | 80.2 | 82.1 | |
| 8 | √ | √ | √ | 80.4 | 83.7 |
"

"


"

"
"
"
"
"
"
"
| [1] | ZHANG Q, HOU J, HU X, et al. Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests[J]. Measurement, 2022, 199: 111348. |
| [2] | 杜昭,张文榕,朱兴一.基于网联车辆数据融合的路面平整度评估方法[J].中国公路学报,2024,37(6):302-316. |
| DU Z, ZHANG W R, ZHU X Y. Road roughness assessment based on fusion of connected-vehicles data [J]. China Journal of Highway and Transportation,2024,37(6):302-316. | |
| [3] | WANG R, LIU W, DING R, et al. Switching control of semi-active suspension based on road profile estimation[J]. Vehicle System Dynamics, 2022, 60(6): 1972-1992. |
| [4] | SANG Y, YU Q, FANG Y, et al. Smartphone-based IRI estimation for pavement roughness monitoring: a data-driven approach[J]. IEEE Internet of Things Journal, 2024, 11(11): 19708–19720. |
| [5] | 梁冠群, 赵通, 王岩, 等. 基于 LSTM 网络的路面不平度辨识方法[J]. 汽车工程, 2021, 43(4): 509-517. |
| LIANG G Q, ZHAO T, WANG Y, et al. Road unevenness identification based on LSTM network [J]. Automotive Engineering,2021,43(4):509-517. | |
| [6] | 李韶华,李健玮,冯桂珍.基于GA-LSTM自适应卡尔曼滤波的路面不平度识别[J].振动与冲击,2024,43(9):121-130. |
| LI S H, LI J W, FENG G Z. Road roughness recognition based on GA-LSTM adaptive Kalman filtering [J]. Journal of Vibration and Shock, 2024,43(9):121-130. | |
| [7] | YAN K, ZHANG Z. Automated asphalt highway pavement crack detection based on deformable single shot multi-box detector under a complex environment[J]. IEEE Access, 2021, 9: 150925-150938. |
| [8] | HOU Y, SHI H, CHEN N, et al. Vision image monitoring on transportation infrastructures: a lightweight transfer learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(11): 12888-12899. |
| [9] | ZHANG Z, LIU F, HUANG Y, et al. Detection and statistics system of pavement distresses based on street view videos[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(10): 15106-15115. |
| [10] | CHENG H, ZHANG B, ZHONG Y, et al. Quantitative pixel-level segmentation and 3D reconstruction of concealed cracks in asphalt pavements[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(11): 18136-18152. |
| [11] | 王雪玮,李思渊,梁晓,等.基于结构重参数化与自适应注意力的复杂路面快速识别模型[J].中国公路学报,2024,37(3):245-258. |
| WANG X W, LI S Y, LIANG X, et al. A fast identification model for complex pavement based on structural reparameterization and adaptive attention [J]. China Journal of Highway and Transportation, 2024,37(3):245-258. | |
| [12] | 王海,李建国,蔡英凤,等.基于激光雷达点云的动态驾驶场景多任务分割网络[J].汽车工程,2024,46(9):1608-1616. |
| WANG H, LI J G, CAI Y F, et al. A lidar-based dynamic driving scene multi-task segmentation network [J]. Automotive Engineering, 2024,46(9):1608-1616. | |
| [13] | XIONG H, ZHU T, LIU Y, et al. Road-model-based road boundary extraction for high definition map via lidar[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18456-18465. |
| [14] | CHEN T H, CHANG T S. RangeSeg: range-aware real time segmentation of 3D LiDAR point clouds[J]. IEEE Transactions on Intelligent Vehicles, 2021, 7(1): 93-101. |
| [15] | 李思纯,王建军,宋伟润,等.无人驾驶扫地机道路可行驶区域的融合提取研究[J].仪器仪表学报,2024,45(12):190-200. |
| LI S C, WANG J J, SONG W R, et al. Fusion extraction of road drivable area for unmanned sweepers [J]. Chinese Journal of Scientific Instrument, 2024,45(12):190-200. | |
| [16] | 马新江,岳东杰,沈月千,等.基于车载激光点云的路面坑槽检测方法[J].中国激光,2024,51(5):190-203. |
| MA X J, YUE D J, SHEN Y Q, et al. Pavement pothole detection method based on vehicle-mounted laser point cloud[J]. Chinese Journal of Lasers,2024,51(5):190-203. | |
| [17] | GUO Y, WANG H, HU Q, et al. Deep learning for 3D point clouds: a survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 43(12): 4338-4364. |
| [18] | ZHAO T, GUO P, HE J, et al. A hierarchical scheme of road unevenness perception with lidar for autonomous driving comfort[J]. IEEE Transactions on Intelligent Vehicles, 2023, 9(1): 2439-2448. |
| [19] | SHAN Y, FU Y, CHEN X, et al. LiDAR based traversable regions identification method for off-road UGV driving[J]. IEEE Transactions on Intelligent Vehicles, 2023, 9(2): 3544-3557. |
| [20] | 卢才武,薛佳楠,李萌,等.基于露天矿三维点云的非结构化道路语义分割方法[J].煤炭学报,2024,49(S2):1295-1309. |
| LU C W, XUE J N, LI M, et al. Unstructured road semantic segmentation method based on 3D point cloud of open pit mine [J]. Journal of China Coal Society, 2024,49(S2):1295-1309. | |
| [21] | QI C R, YI L, SU H, et al. Pointnet++: deep hierarchical feature learning on point sets in a metric space[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| [22] | 王章宇,陈阳,周彬,等.一种面向非结构化道路的点云语义分割方法[J].北京航空航天大学学报,2025,51(2):457-465. |
| WANG Z, CHEN Y, ZHOU B, et al. A point cloud semantic segmentation method for unstructured roads[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(2): 457-465. | |
| [23] | 伍文广, 田双岳, 张志勇, 等. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| WU W G, TIAN S Y, ZHANG Z Y, et al. Research on semantic segmentation of uneven features of unpaved road [J].Automotive Engineering, 2023, 45(8): 1468-1478. | |
| [24] | LIN T. Focal loss for dense object detection[J]. arXiv preprint arXiv:, 2017. |
| [25] | LIU Z, WANG Y, VAIDYA S, et al. KAN: Kolmogorov-arnold networks[J]. arXiv preprint arXiv:, 2024. |
| [26] | ARMENI I, SENER O, ZAMIR A R, et al. 3D semantic parsing of large-scale indoor spaces[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 1534-1543. |
| [27] | DAI A, CHANG A X, SAVVA M, et al. ScanNet: richly-annotated 3D reconstructions of indoor scenes[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 5828-5839. |
| [28] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 652-660. |
| [29] | ZHAO H, JIANG L, JIA J, et al. Point transformer[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 16259-16268. |
| [30] | MA X, QIN C, YOU H, et al. Rethinking network design and local geometry in point cloud: a simple residual MLP framework[J]. arXiv preprint arXiv:, 2022. |
| [31] | XU M, ZHANG J, ZHOU Z, et al. Learning geometry-disentangled representation for complementary understanding of 3D object point cloud[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3056-3064. |
| [1] | Lisheng Jin,Hongyu Zhang,Baicang Guo. Semi Solid-State LiDAR Object Detection Algorithm Enhanced by Feature Stability Enhancement [J]. Automotive Engineering, 2024, 46(6): 1015-1024. |
| [2] | Wenguang Wu,Shuangyue Tian,Zhiyong Zhang,Bin Zhang. Research on Semantic Segmentation of Uneven Features of Unpaved Road [J]. Automotive Engineering, 2023, 45(8): 1468-1478. |
| [3] | Guanqun Liang,Tong Zhao,Yan Wang,Yintao Wei. Road Unevenness Identification Based on LSTM Network [J]. Automotive Engineering, 2021, 43(4): 509-517. |
| [4] | Teng Cheng,Lei Sun,Dengchao Hou,Qin Shi,Junning Zhang,Jiong Chen,He Huang. Multi-level and Multi-modal Target Detection Based on Feature Fusion [J]. Automotive Engineering, 2021, 43(11): 1602-1610. |
| [5] | Xu Guoyan, Niu Huan, Guo Chenyang, Su Hongjie. Research on Target Recognition and Tracking Based on 3D Laser Point Cloud [J]. Automotive Engineering, 2020, 42(1): 38-46. |
|
||