Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (9): 1383-1393.doi: 10.19562/j.chinasae.qcgc.2021.09.016
Previous Articles Next Articles
Luming Chen,Zili Liao( ),Zheng Zhang
),Zheng Zhang
Received:2020-09-20
Online:2021-09-25
Published:2021-09-26
Contact:
Zili Liao
E-mail:zili_liao@163.com
Luming Chen,Zili Liao,Zheng Zhang. Design of Hierarchical Control System for Dual⁃steering of Multi⁃wheel Distributed Electric Drive Vehicles[J].Automotive Engineering, 2021, 43(9): 1383-1393.

"

"

"
"
"

"
"
"
| 序号 | 工况类型 | 路面 | 车速 |
|---|---|---|---|
| 工况1 | 角阶跃输入 | μ=0.8 | 20 km/h |
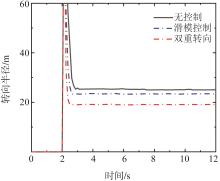
| 工况2 | 最小半径转向 | μ=0.8 | 最低稳定车速 |
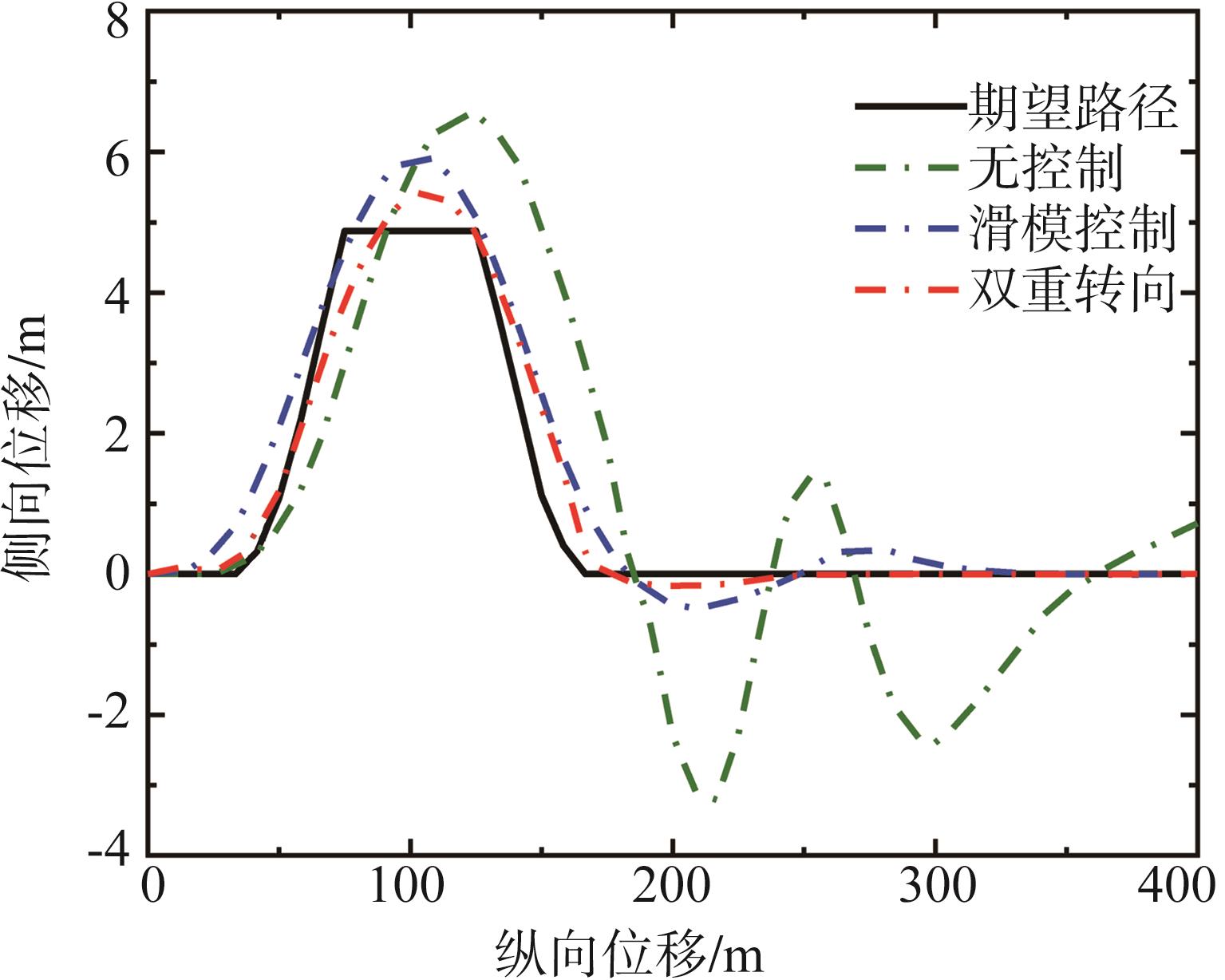
| 工况3 | 双移线行驶 | μ=0.2 | 80 km/h |
"
| 参数 | 数值 |
|---|---|
| 总质量/kg | 21 000 |
| 车轮有效半径/m | 0.59 |
| 油门最大开度/% | 100 |
| 轮毂电机最大转矩/(N·m) | 1 500 |
| 转向盘最大转角/(°) | 900 |
"
"
"
"

"
"
"
"
"
"
"
"
| 1 | 袁磊, 刘维平, 刘西侠. 三轴车辆全轮转向滑模控制器设计[J]. 兵工学报, 2015, 36 (8) : 1391-1397. |
| YUAN L, LIU W P, LIU X X. Design of sliding mode controller for all⁃wheel steering system of three⁃axle vehicle[J]. Acta Armamentarii, 2015, 36 (8) : 1391-1397. | |
| 2 | LI L, JIA G, CHEN J, et al. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tire forces[J]. Vehicle System Dynamics, 2015, 53(8) : 1093-1116. |
| 3 | KIM J, PARK C, HWANG S, et al. Control algorithm for an independent motor⁃drive vehicle[J]. IEEE Transactions on Vehicular Technology, 2010, 59 (7) : 3213-3222. |
| 4 | ZHAO B, XU N, CHEN H, et al. Stability control of electric vehicles with in⁃wheel motors by considering tire slip energy[J]. Mechanical Systems & Signal Processing, 2019, 118 (2) : 340-359. |
| 5 | HUANG G, YUAN X, SHI K, et al. A BP⁃PID controller⁃based multi⁃model control system for lateral stability of distributed drive electric vehicle[J]. Journal of the Franklin Institute, 2019, 356 (13) :7290-311. |
| 6 | 余卓平, 冯源, 熊璐. 分布式驱动电动汽车动力学控制发展现状综述[J]. 机械工程学报, 2013, 49 (8) : 105-114. |
| YU Z P, FENG Y, XIONG L. Review on vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49 (8) : 105-114. | |
| 7 | 范晶晶, 罗禹贡, 张弦, 等. 多轴独立电驱动车辆驱动力的协调控制[J]. 清华大学学报(自然科学版), 2011, 51 (4) : 478-481. |
| FAN J J, LUO Y G, ZHANG X, et al. Coordinated control of driving torque for multi⁃axles independent driving vehicles[J]. Journal of Tsinghua University (Science and Technology), 2011, 51 (4) : 478-481. | |
| 8 | 廖自力, 阳贵兵, 高强, 等. 多轮独立电驱动车辆转向稳定性集成控制研究[J]. 兵工学报, 2017, 38 (5) : 834-842. |
| LIAO Z L, YANG G B, GAO Q, et al. A study of driving force optimal control of multi⁃wheel independent electric drive vehicle[J]. Acta Armamentarii, 2017, 38 (5) : 834-842. | |
| 9 | 苏建强, 马晓军, 许世蒙, 等. 多轮电驱动装甲车辆车轮防滑控制[J]. 汽车工程, 2014, 36 (5) : 592-596. |
| SU J Q, MA X J, XU S M, et al. Anti⁃slip control of armored vehicle with multi⁃in⁃wheel motors drive[J]. Automotive Engineering, 2014, 36 (5) : 592-596. | |
| 10 | 刘春明, 张承宁, 刘志福. 8×8轮毂电机全轮驱动车辆动力学建模与仿真[J]. 北京理工大学学报, 2014, 34 (2) : 143-147. |
| LIU C M, ZHANG C N, LIU Z F. Dynamics modeling and simulation on four⁃axle vehicle driven by in wheel motors[J]. Transactions of Beijing Institute of Technology, 2014, 34 (2) : 143-147. | |
| 11 | 余卓平, 高晓杰. 车辆行驶过程中的状态估计问题综述[J]. 机械工程学报, 2009, 45 (5) : 20-33. |
| YU Z P, GAO X J. Review of vehicle state estimation problem under driving situation[J]. Journal of Mechanical Engineering, 2009, 45 (5) : 20-33. | |
| 12 | 张征, 刘春光, 马晓军, 等. 一种基于数据融合的全轮驱动车辆质心侧偏角估计方法[J]. 兵工学报, 2020, 41 (15) : 842-849. |
| ZHANG Z, LIU C G, MA X J, et al. Method for estimating sideslip angle of all⁃wheel drive vehicle based on data fusion [J]. Acta Armamentarii, 2020, 41 (15) : 842-849. | |
| 13 | 李刚, 王野, 宗长富. 四轮轮毂电机电动汽车行驶状态估计[J]. 汽车工程, 2018, 40 (2) : 150-155. |
| LI G, WANG Y, ZONG C F. Driving state estimation of electric vehicle with four⁃wheel⁃hub⁃motors [J]. Automotive Engineering, 2018, 40 (2) : 150-155. | |
| 14 | 姜立标, 吴中伟. 基于趋近律滑模控制的智能车辆轨迹跟踪研究[J]. 农业机械学报, 2018, 49 (3) : 381-386. |
| JIANG L B, WU Z W. Sliding mode control for intelligent vehicle trajectory tracking based on reaching law[J]. Transactions of the Chinese Society for Agricul⁃tural Machinery, 2018, 49 (3) : 381-386. | |
| 15 | 张征, 马晓军, 刘春光, 等. 基于分层模型的轮毂电机驱动车辆直接横摆力矩控制[J]. 农业机械学报, 2019, 50 (12) : 387-394. |
| ZHANG Z, MA X J, LIU C G, et al. Direct yaw moment control based on hierarchical model for in⁃wheel motor drive vehicles [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50 (12) : 387-394. |
| [1] | Xinrong Zhang,Yuhang Tan,Yifan Jia,Jin Huang,Quanning Xu. Robust Control of Path Tracking for Four-Wheel Independent Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(2): 253-262. |
| [2] | Junnian Wang,Chunlin Zhang,Mengyuan Zhao,Yue Qiang,Dachang Guo,Fang Yang. Coordinated Shift Control of Hub-Motor Two-Speed Transmission Without Power Interruption [J]. Automotive Engineering, 2023, 45(10): 1885-1896. |
| [3] | Zhang Heshan, Deng Zhaoxiang, Yang Minglei, Luo Jie, Xu Jin. Analytical Calculation of Loaded Magnetic Field in Hub Motor for Electric Vehicle [J]. Automotive Engineering, 2020, 42(12): 1655-1664. |
| [4] | Wang Yan, Liang Guanqun, Wei Yintao. Road Identification Algorithm of Intelligent Tire Based on Support Vector Machine [J]. Automotive Engineering, 2020, 42(12): 1671-1678. |
| [5] | Wang Qidong, Cao Ye, Chen Wuwei, Zhao Linfeng, Tan Hongliang, Xie Youhao. Research on Differential Steering by Wire in a Hub-motors-driven Vehicle [J]. Automotive Engineering, 2019, 41(12): 1384-1393. |