Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (7): 1027-1039.doi: 10.19562/j.chinasae.qcgc.2022.07.009
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Shukai Zhang,Hui Chen( ),Meicen Liu
),Meicen Liu
Received:2021-12-14
Revised:2022-01-14
Online:2022-07-25
Published:2022-07-20
Contact:
Hui Chen
E-mail:hui-chen@tongji.edu.cn
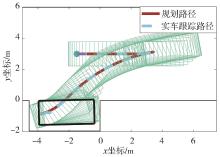
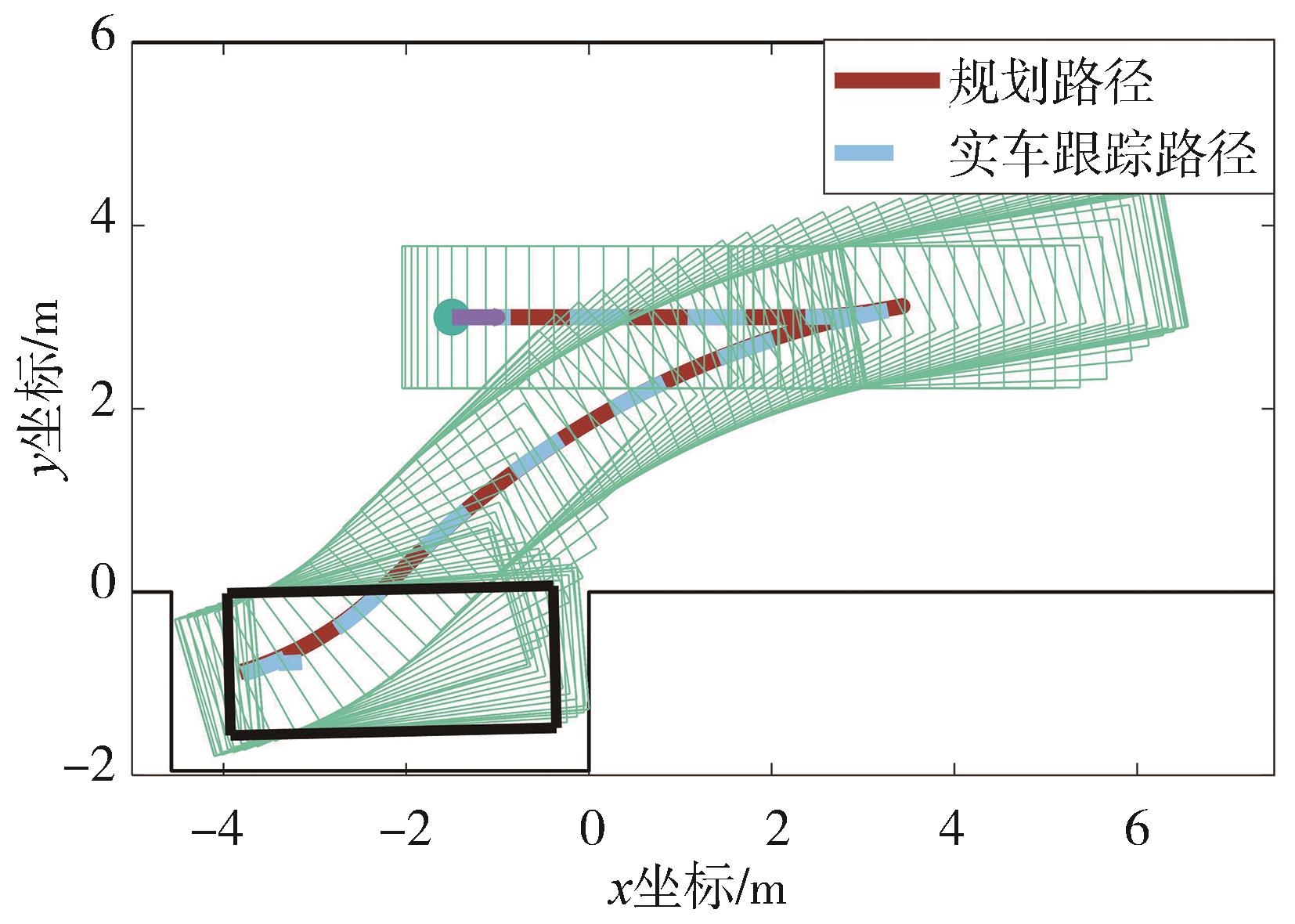
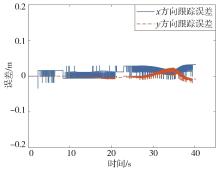
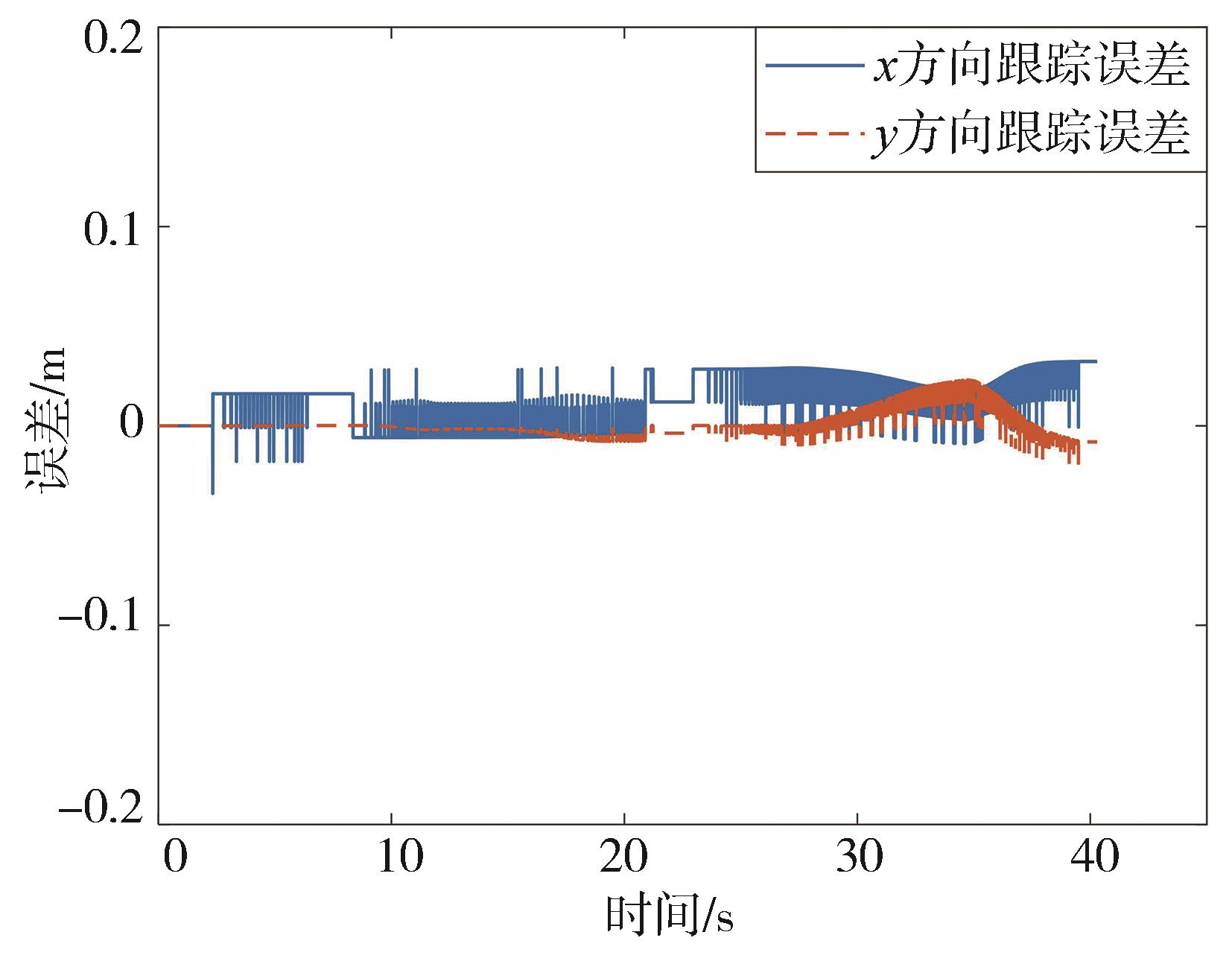
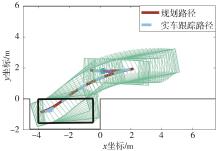
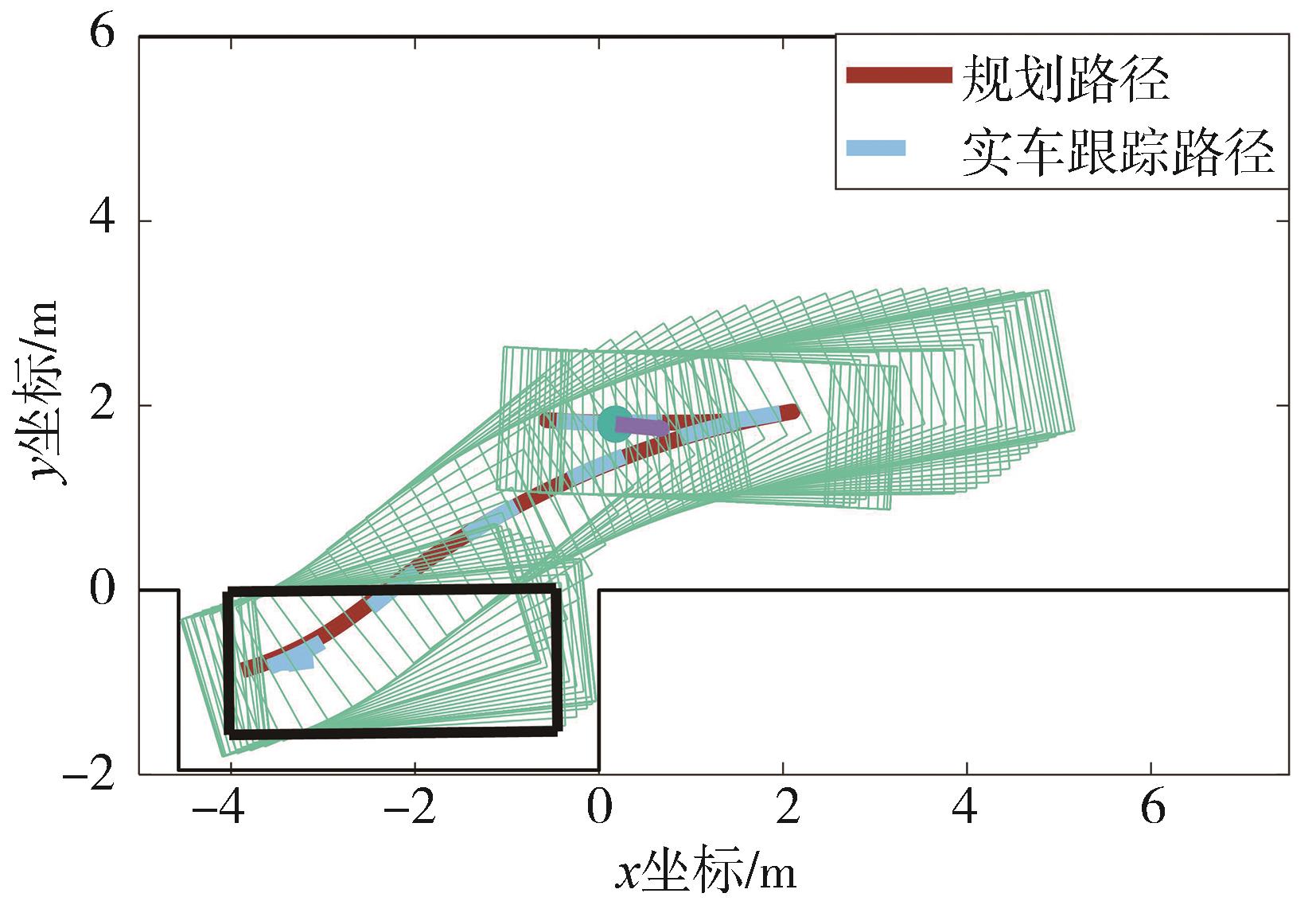
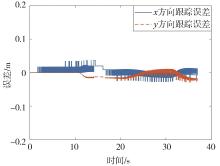
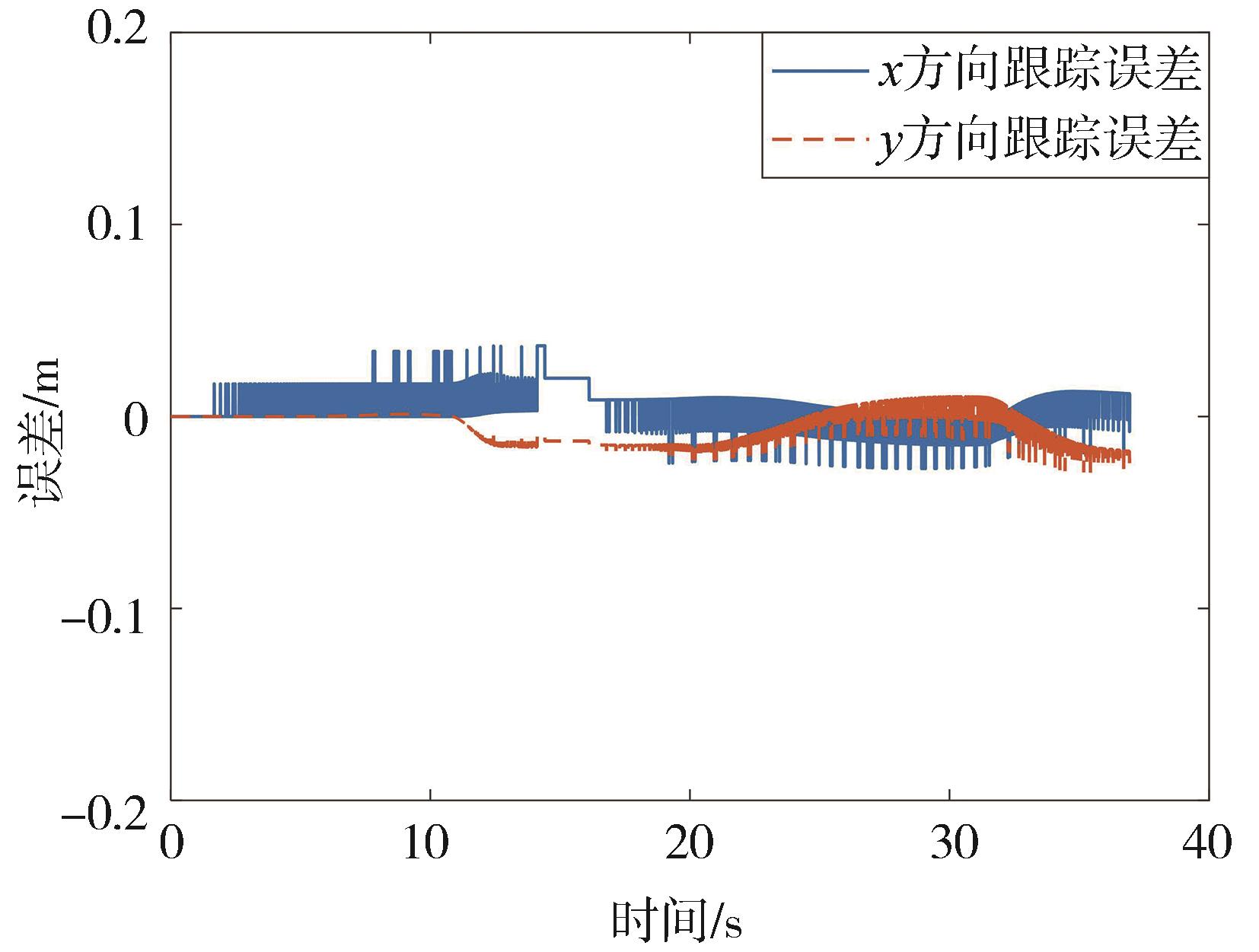
Shukai Zhang,Hui Chen,Meicen Liu. Control Method of Path Following for Automatic Parking System[J].Automotive Engineering, 2022, 44(7): 1027-1039.
"
"
"

"
"
"

"
"

"
"
"
"
"
"
"
"


"
"
"
"
"
"
"

"
"
"
"
"
"
| 1 | ZHANG P Z, XIONG L, YU Z P, et al. Reinforcement learning-based end-to-end parking for automatic parking system[J]. Sensors, 2019, 19(18): 1-24. |
| 2 | DAS S, SHEERIN M R, NAIR S R, et al. Path tracking and control for parallel parking[C]. ICIP. 2020: 1-6. |
| 3 | 高强, 陆洲, 段晨东, 等. 汽车垂直泊车路径规划与路径跟踪研究[J]. 汽车工程, 2021, 43(7): 987-994,1012. |
| GAO Q, LU Z, DUAN C D, et al. Research on vehicle vertical parking path planning and path tracking[J]. Automotive Engineering, 2021, 43(7): 987-994,1012. | |
| 4 | MUHAMMAD A K, MUHAMMID A, NISAR A, et al. Nonlinear control design of a half-car model using feedback linearization and an LQR controller[J]. Applied Sciences, 2020, 10(9): 1-17. |
| 5 | 张家旭, 王晨, 赵健, 等. 面向狭小平行泊车位的路径规划与跟踪控制[J]. 吉林大学学报, 2021, 51(5): 1879-1886. |
| ZHANG J X, WANG C, ZHAO J, et al. Path planning and tracking control for narrow parallel parking space[J]. Journal of Jilin University, 2021, 51(5): 1879-1886. | |
| 6 | MENG X X, WU J, HE R, et al. A path planning and model predictive control for automatic parking system[C]. SAE World Congress Experience. 2020. |
| 7 | CHU S J, XIE Z C, WONG P K, et al. Observer-based gain scheduling path following control for autonomous electric vehicles subject to time delay[J]. Vehicle System Dynamics, 2020: 1-26. |
| 8 | PENG Z H, WANG J, HAN Q D. Path-following control of autonomous underwater vehicles subject to velocity and input constraints to velocity and input constraints via neurodynamic optimization[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8724-8732. |
| 9 | 谢圣骥, 陈慧, 张继仁. 平行泊车路径规划方法[C].中国汽车工程学会年会论文集. 2014. |
| XIE S J, CHEN H, ZHANG J R. Path planning strategy for parallel parking[C]. Proceedings of the Annual Conference of China Society of Automotive Engineers. 2014. | |
| 10 | MUELLER B, DEUTSCHER J. Orbital tracking control for car parking via control of the clock using a nonlinear reduced order steering-angle observer[C]. Proceeding of the 9th European Control Conference, 2007. |
| 11 | 程昆朋, 陈慧. 全自动泊车系统的路径跟随[J]. 汽车技术, 2013(10): 26-29. |
| CHENG K P, CHEN H. Path following of a fully-automatic parking assist system[J]. Automobile Technology, 2013(10): 26-29. | |
| 12 | 陈慧, 范正帅. 一种辅助泊车系统的路径跟随方法及装置: 201610822952.0[P]. 2016-09-13. |
| CHEN H, FAN Z S. Path following strategy and equipment of auxiliary parking system: 201610822952.0[P]. 2016-09-13. |
| [1] | Tianfei Ma,Bo Li,Bing Zhu,Jian Zhao. Ultrasonic Radar Modeling of Automatic Parking System Considering Atmospheric Conditions Effect [J]. Automotive Engineering, 2023, 45(9): 1646-1654. |
| [2] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [3] | Ping Liu, Zhuo Chen, Mingjie Liu, Changhao Piao, Soohyun Jang, Kailin Wan. Gauss Allocation Points Parameterization Parallel Automatic Parking Trajectory Planning for Vehicle Under Multi-Stage Constraints [J]. Automotive Engineering, 2023, 45(7): 1163-1173. |
| [4] | Zuohua Miao,Liangjian Zhu,Chengcheng Zhao,Daiwen Liu,Yiwen Li,Aoguang Chen. Image Enhancement of Low-Light Parking Space Based on Retinex [J]. Automotive Engineering, 2023, 45(6): 989-996. |
| [5] | Xinrong Zhang,Yuhang Tan,Yifan Jia,Jin Huang,Quanning Xu. Robust Control of Path Tracking for Four-Wheel Independent Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(2): 253-262. |
| [6] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [7] | Jie Hu,Linglei Zhu,Ruinan Chen,Xinkai Zhong,Wencai Xu,Minchao Zhang. Research on Parallel Parking Path Planning Method for Narrow Parking Space [J]. Automotive Engineering, 2022, 44(7): 1040-1048. |
| [8] | Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking [J]. Automotive Engineering, 2021, 43(7): 987-994. |
| [9] | Zhang Mingyuan, Chen Li. Closed-loop Position Tracking Control for Dry Clutch Considering Nonlinear Stiffness of Membrane Spring [J]. Automotive Engineering, 2020, 42(7): 894-900. |
| [10] | Zhu Wangwang, Huang Hongcheng ,Ma Jinxing. A Research on Parking Space Detection Algorithm Based on Image Recognition [J]. Automotive Engineering, 2019, 41(7): 744-749. |
| [11] | Hu Wen, Tan Yunsheng, Kang Longyun, Yu Zongguang. Study on Automatic Parking Planning Algorithm Based on Driver's Experience [J]. Automotive Engineering, 2019, 41(12): 1394-1400. |
|