Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (7): 1040-1048.doi: 10.19562/j.chinasae.qcgc.2022.07.010
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Jie Hu1,2,3( ),Linglei Zhu1,2,3,Ruinan Chen1,2,3,Xinkai Zhong1,2,3,Wencai Xu1,2,3,Minchao Zhang1,2,3
),Linglei Zhu1,2,3,Ruinan Chen1,2,3,Xinkai Zhong1,2,3,Wencai Xu1,2,3,Minchao Zhang1,2,3
Received:2022-01-18
Revised:2022-02-04
Online:2022-07-25
Published:2022-07-20
Contact:
Jie Hu
E-mail:auto_hj@163.com
Jie Hu,Linglei Zhu,Ruinan Chen,Xinkai Zhong,Wencai Xu,Minchao Zhang. Research on Parallel Parking Path Planning Method for Narrow Parking Space[J].Automotive Engineering, 2022, 44(7): 1040-1048.

"
"
| 参数 | 数值 |
|---|---|
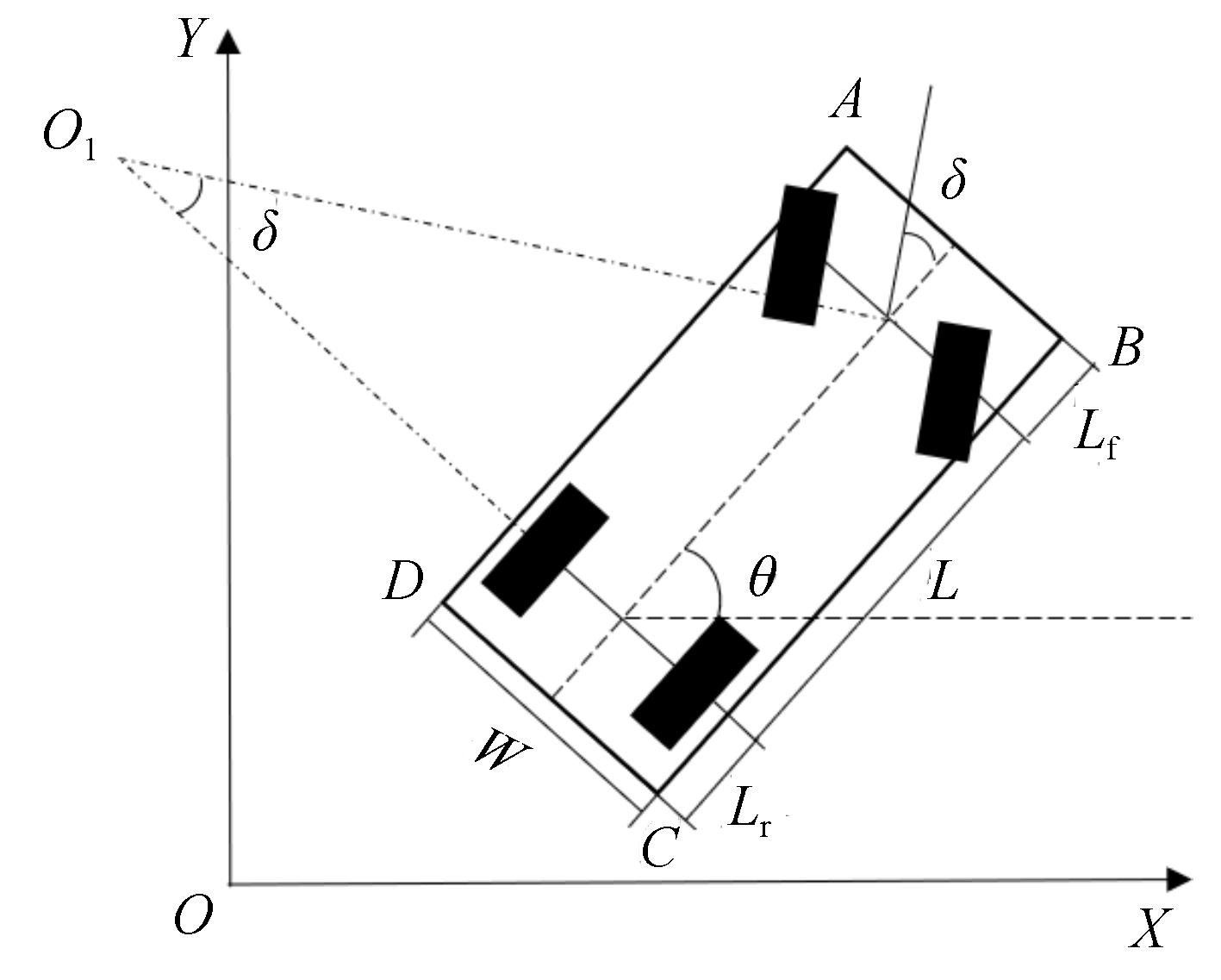
| 车长 | 4.718 |
| 车宽 | 1.84 |
| 轴距长度 | 2.74 |
| 前悬长度 | 0.968 |
| 后悬长度 | 1.01 |
| 最大转向角 | 22.5 |
| 转向传动比 | 20.5 |
| 转向盘转速 | 300 |
"
"
"

"

"
"
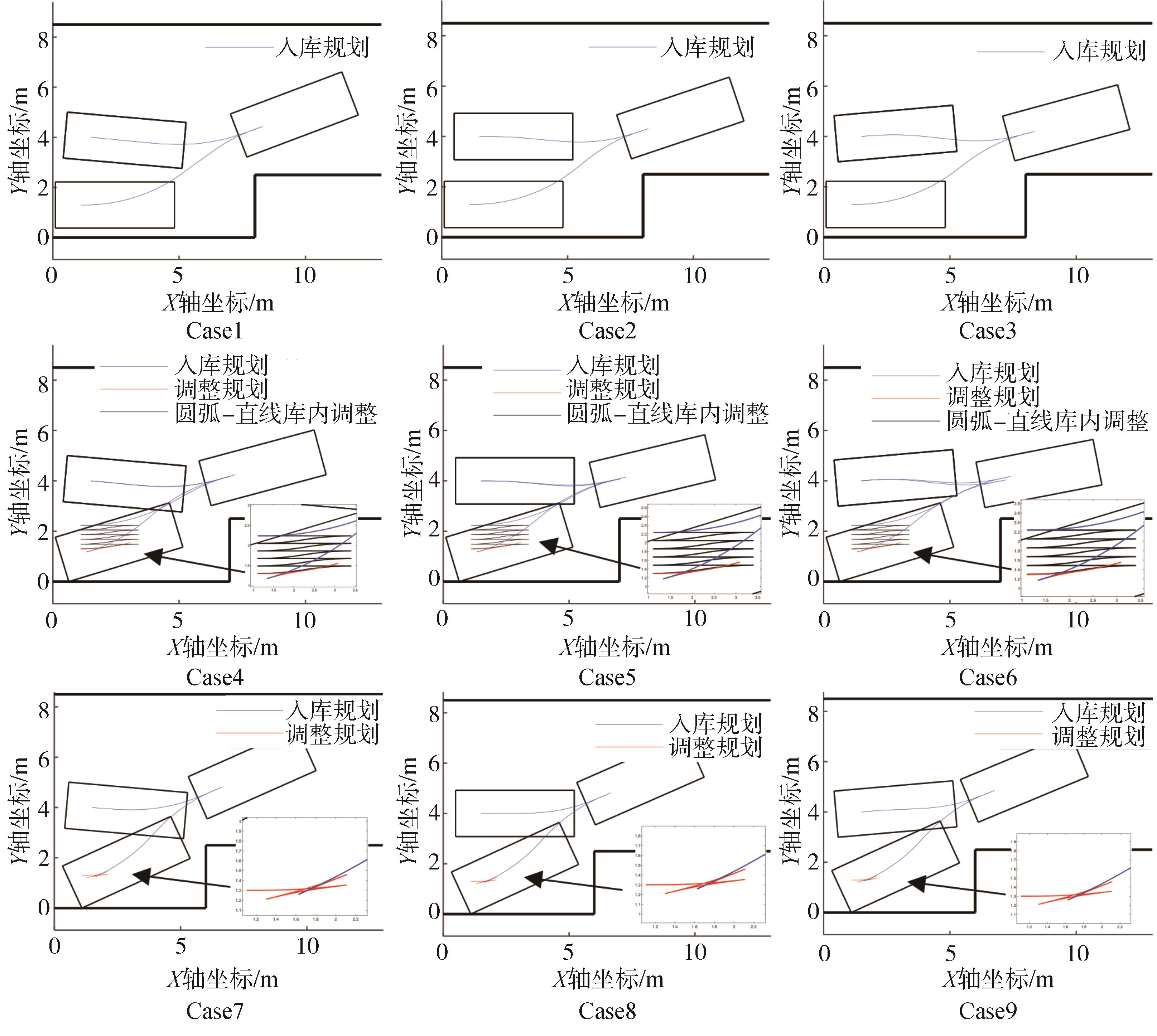
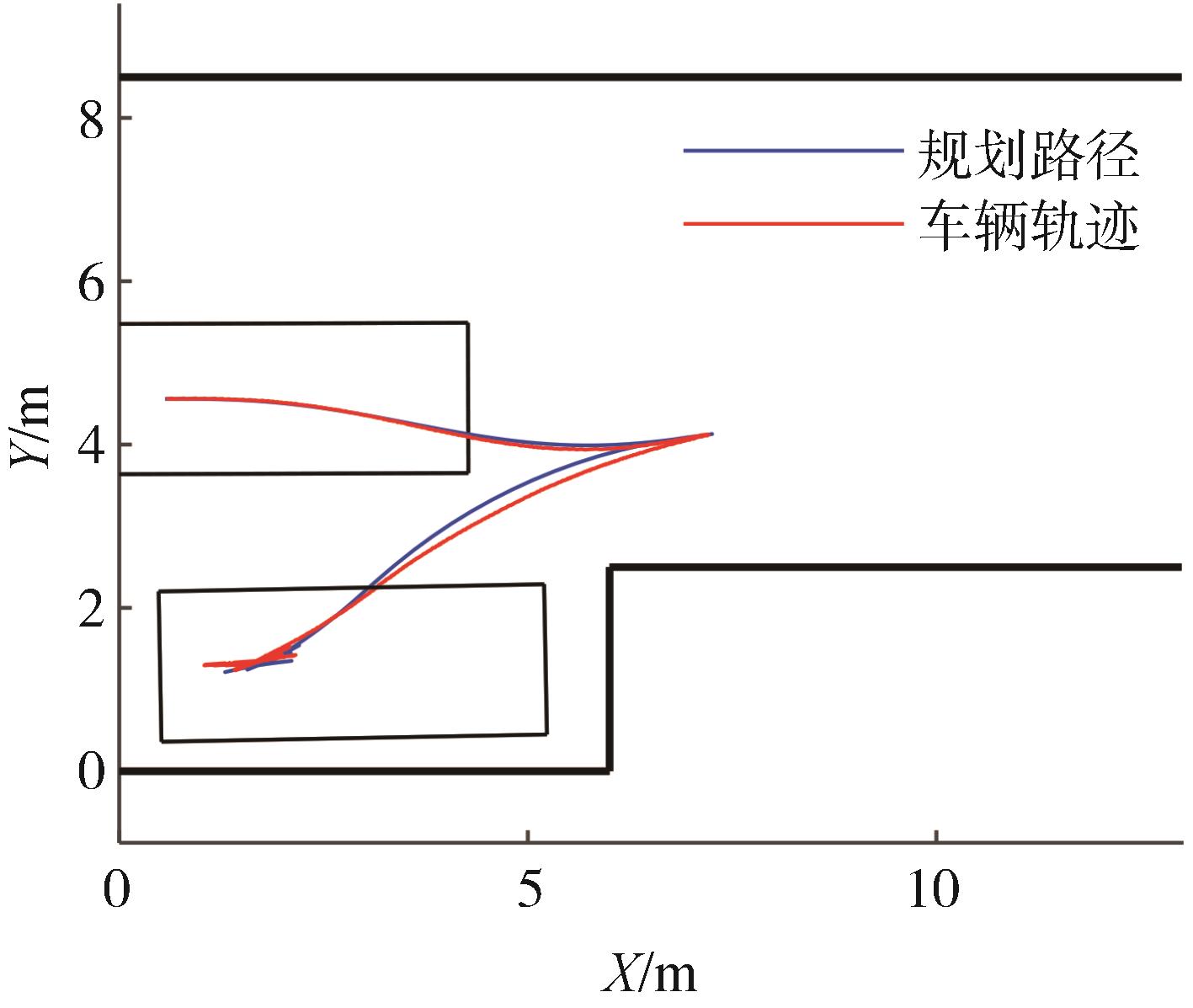
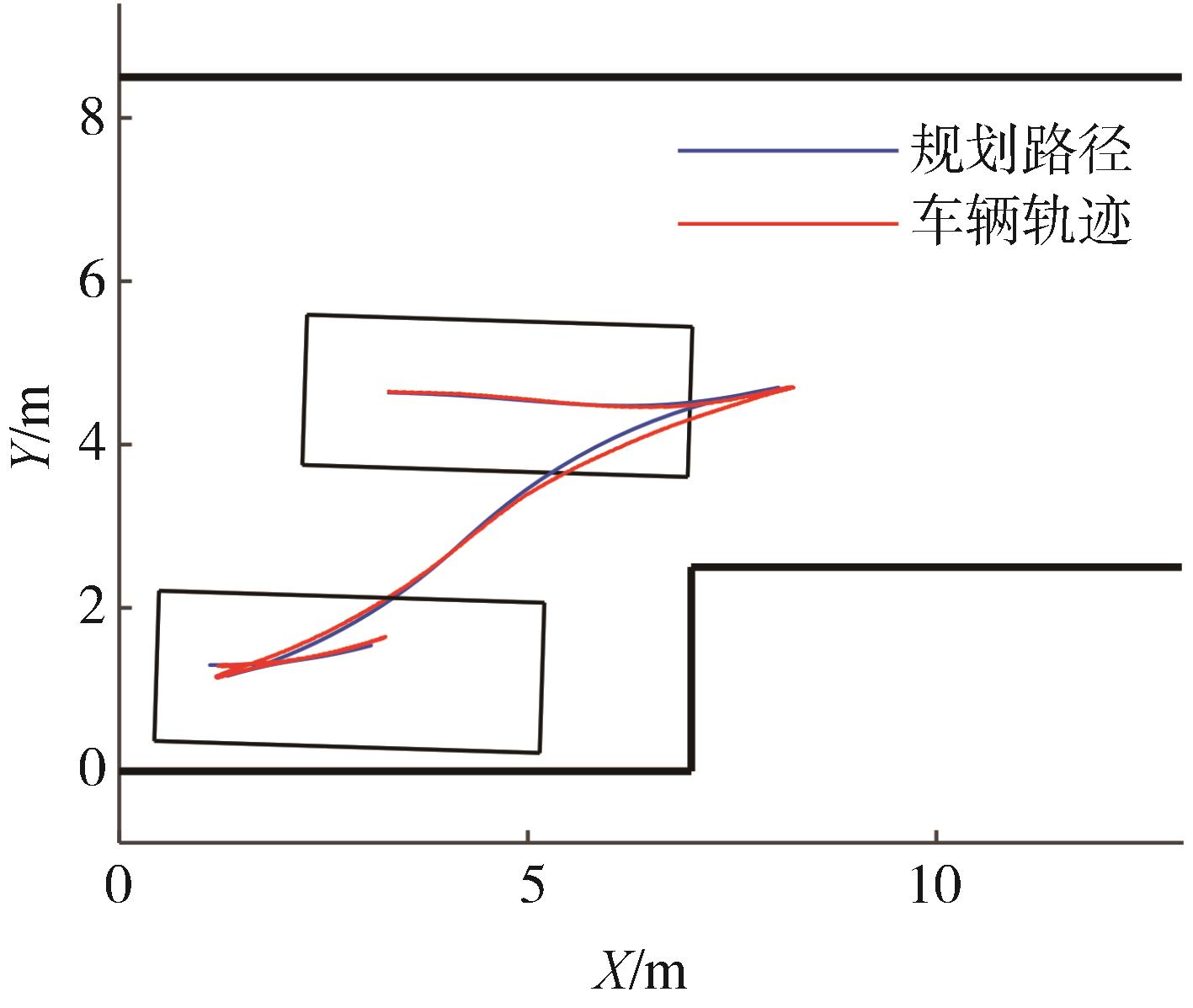
| 场景 | 车位长/m | 起始航向角/(°) |
|---|---|---|
| Case1 | 8 | -5 |
| Case2 | 8 | 0 |
| Case3 | 8 | 5 |
| Case4 | 7 | -5 |
| Case5 | 7 | 0 |
| Case6 | 7 | 5 |
| Case7 | 6 | -5 |
| Case8 | 6 | 0 |
| Case9 | 6 | 5 |
"

"


"

"
"
"
| 1 | 徐磊. 基于EPS的自动泊车路径规划及跟踪控制研究[D].合肥: 合肥工业大学, 2017. |
| XU L. Research on path planning and tracking of automatic parking system based on eps[D]. Hefei: Hefei University of Technology, 2017. | |
| 2 | 张家旭,赵健,施正堂,等. 基于回旋曲线的平行泊车路径规划和跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(6):11. |
| ZHANG J X, ZHAO J, SHI Z T, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(6):11. | |
| 3 | 张家旭,王晨,赵健,等.面向狭小平行泊车位的路径规划与跟踪控制[J].吉林大学学报(工学版),2021,51(5):1879-1886. |
| ZHANG J X, WANG C, ZAHO J, et al. Path planning and tracking control for narrow parallel parking space[J]. Journal of Jilin University (Engineering and Technology Edition), 2021,51(5):1879-1886. | |
| 4 | 李玄赫. 狭窄车位的自动泊车路径规划与跟踪控制研究[D].大连: 大连理工大学, 2021. |
| LI X H. Research on automatic parking path planning and tracking control in narrow parking spaces[D].Dalian: Dalian University of Technology, 2021. | |
| 5 | LI B, WANG K, SHAO Z. Time-optimal maneuver planning in automatic parallel parking using a simultaneous dynamic optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11):3263-3274. |
| 6 | 王启明,宗高强,胥津铭.多段式自动泊车最优路径规划与仿真分析[J/OL].系统仿真学报. https://kns.cnki.net/kcms/detai l/11.3092.V.20210204.1632.012.html. |
| WANG Q M, ZONG G Q, XU J M. Optimal path planning and simulation analysis of multi-stage automatic parking[J/OL]. Journal of System Simulation. https://kns.cnki.net/kcms/detail/ 11.3092.V.20210204.1632.012.html. | |
| 7 | CHAI R, TSOURDOS A, SAVVARIS A, et al. Multi-objective optimal parking maneuver planning of autonomous wheeled vehicles[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10809-10821. |
| 8 | 张家旭,赵健,施正堂,等.采用hp自适应伪谱法的全自动泊车系统轨迹规划与跟踪控制[J].西安交通大学学报,2020,54(6):176-184. |
| ZHANG J X, ZHAO J, SHI Z T, et al. A trajectory planning and tracking control method for fully-automatic parking system using Hp-adaptive pseudo spectral method[J]. Joural of Xi’an Jiaotong University, 2020, 54(6): 176-184. | |
| 9 | VLASAK J, SOJKA M, HANZÁLEK Z. Accelerated RRT* and its evaluation on autonomous parking[J]. 2020, arXiv:. |
| 10 | BERGMAN K, LJUNGQVIST O, AXEHILL D. Improved path planning by tightly combining lattice-based path planning and numerical optimal control[J]. 2019, arXiv:. |
| 11 | 孟祥哲. 基于随机采样与优化的自动泊车路径规划与跟踪控制算法研究[D].长春:吉林大学,2021.003275. |
| MENG X Z. Research on automatic parking path planning and tracking control algorithm based on random sampling and optimization[D]. Changchun:Jilin University,2021.003275. | |
| 12 | ZHENG K Y, LIU S. RRT based path planning for autonomous parking of vehicle[C].2018 IEEE 7th Data Driven Control and Learning Systems Conference, Hubei, China, 2018: 627-632. |
| 13 | 孙宏伟,陈慧,宋绍禹.一种基于强化学习的小库位自动平行泊车运动规划方法(英文)[J].汽车技术,2021(9):17-26. |
| SUN H W, CHEN H, SONG S Y. A motion planning method based on reinforcement learning for automatic parallel parking in small slot[J]. Automobile Technology, 2021(9): 17-26. | |
| 14 | ZHANG J, CHEN H, SONG S, et al. Reinforcement learning-based motion planning for automatic parking system[J]. IEEE Access, 2020, 8: 154485-154501. |
| 15 | 陈鑫,兰凤崇,陈吉清.基于改进深度强化学习的自动泊车路径规划[J].重庆理工大学学报(自然科学),2021,35(7): 17-27. |
| CHEN X, LAN F C, CHEN J Q. Deep reinforcement learning based trajectory planning for automatic parking[J]. Journal of Chongqing University of Technology( Natural Science) ,2021,35 (7):17-27. | |
| 16 | ZHANG P, XIONG L, YU Z, et al. Reinforcement learning-based end-to-end parking for automatic parking system[J]. Sensors, 2019, 19(18):3996. |
| [1] | Tianfei Ma,Bo Li,Bing Zhu,Jian Zhao. Ultrasonic Radar Modeling of Automatic Parking System Considering Atmospheric Conditions Effect [J]. Automotive Engineering, 2023, 45(9): 1646-1654. |
| [2] | Jie Hu, Zhihao Zhang, Ruinan Chen, Ruipeng Chen, Haoyan Liu, Qi Zhu, Hui Chen. Spatio-temporal Joint Planning Method of Intelligent Vehicles Based on Improved Hybrid A [J]. Automotive Engineering, 2023, 45(7): 1123-1133. |
| [3] | Ping Liu, Zhuo Chen, Mingjie Liu, Changhao Piao, Soohyun Jang, Kailin Wan. Gauss Allocation Points Parameterization Parallel Automatic Parking Trajectory Planning for Vehicle Under Multi-Stage Constraints [J]. Automotive Engineering, 2023, 45(7): 1163-1173. |
| [4] | Zuohua Miao,Liangjian Zhu,Chengcheng Zhao,Daiwen Liu,Yiwen Li,Aoguang Chen. Image Enhancement of Low-Light Parking Space Based on Retinex [J]. Automotive Engineering, 2023, 45(6): 989-996. |
| [5] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [6] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
| [7] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |
| [8] | Hongchang Zhang,Peng Ning,Jie Yang,Jianwei Song,Lin Hao,Juan Zeng. Parallel Parking Trajectory Planning Based on Double-Layer Solution Strategy [J]. Automotive Engineering, 2023, 45(12): 2299-2309. |
| [9] | Minghui Ren,Jun Liang,Long Chen,Chun Zhang,Yun Wang. Multi-AGV Path Planning for Intelligent Garage Based on Improved Conflict Search [J]. Automotive Engineering, 2023, 45(10): 1933-1943. |
| [10] | Shukai Zhang,Hui Chen,Meicen Liu. Control Method of Path Following for Automatic Parking System [J]. Automotive Engineering, 2022, 44(7): 1027-1039. |
| [11] | Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking [J]. Automotive Engineering, 2021, 43(7): 987-994. |
| [12] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [13] | Xudong Zhang,Fukang Xu,Yuan Zou,Ningyuan Guo,Yu Zhang. A Local Path Planning Algorithm for Intelligent Wheeled Vehicle Combining TangentBug and Dubins Path [J]. Automotive Engineering, 2021, 43(6): 833-841. |
| [14] | Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction [J]. Automotive Engineering, 2021, 43(6): 877-884. |
| [15] | Lin Hu,Denghui Zhou,Jing Huang,Ronghua Du,Xin Zhang. Optimal Path Planning for Electric Vehicle with Consideration of Traffic Light and Energy Consumption [J]. Automotive Engineering, 2021, 43(5): 641-649. |
|