Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (12): 2299-2309.doi: 10.19562/j.chinasae.qcgc.2023.12.012
Special Issue: 智能网联汽车技术专题-规划&决策2023年
Previous Articles Next Articles
Hongchang Zhang1,2,3,Peng Ning1,2,3,Jie Yang1,2,3,Jianwei Song1,2,3,Lin Hao1,2,3,Juan Zeng1,2,3( )
)
Received:2023-04-05
Revised:2023-05-11
Online:2023-12-25
Published:2023-12-21
Contact:
Juan Zeng
E-mail:zhc112@126.com
Hongchang Zhang,Peng Ning,Jie Yang,Jianwei Song,Lin Hao,Juan Zeng. Parallel Parking Trajectory Planning Based on Double-Layer Solution Strategy[J].Automotive Engineering, 2023, 45(12): 2299-2309.
"
"
"

"
"
"
| 参数 | 符号 | 单位 | 数值 |
|---|---|---|---|
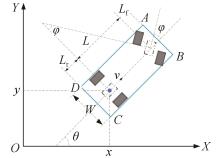
| 车辆轴距 | L | m | 2.830 |
| 车辆前悬 | Lf | m | 1.006 |
| 车辆后悬 | Lr | m | 1.070 |
| 车辆宽度 | W | m | 1.862 |
| 泊车最大车速 | v_max | m/s | 1.0 |
| 泊车最大加速度 | a_max | m/s2 | 0.5 |
| 车辆最大前轮转角 | φ_max | rad | 0.576 |
| 车辆最大前轮转向角速度 | ω_max | rad/s | 0.576 |
"
| 参数 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 车辆起始位置(水平方向) | xt0 | m | -5 |
| 车辆起始位置(垂直方向) | yt0 | m | 2 |
| 车辆起始航向角 | θt0 | rad | 0 |
| 车辆起始速度 | vt0 | m/s | 0 |
| 车辆起始前轮转角 | φt0 | rad | 0 |
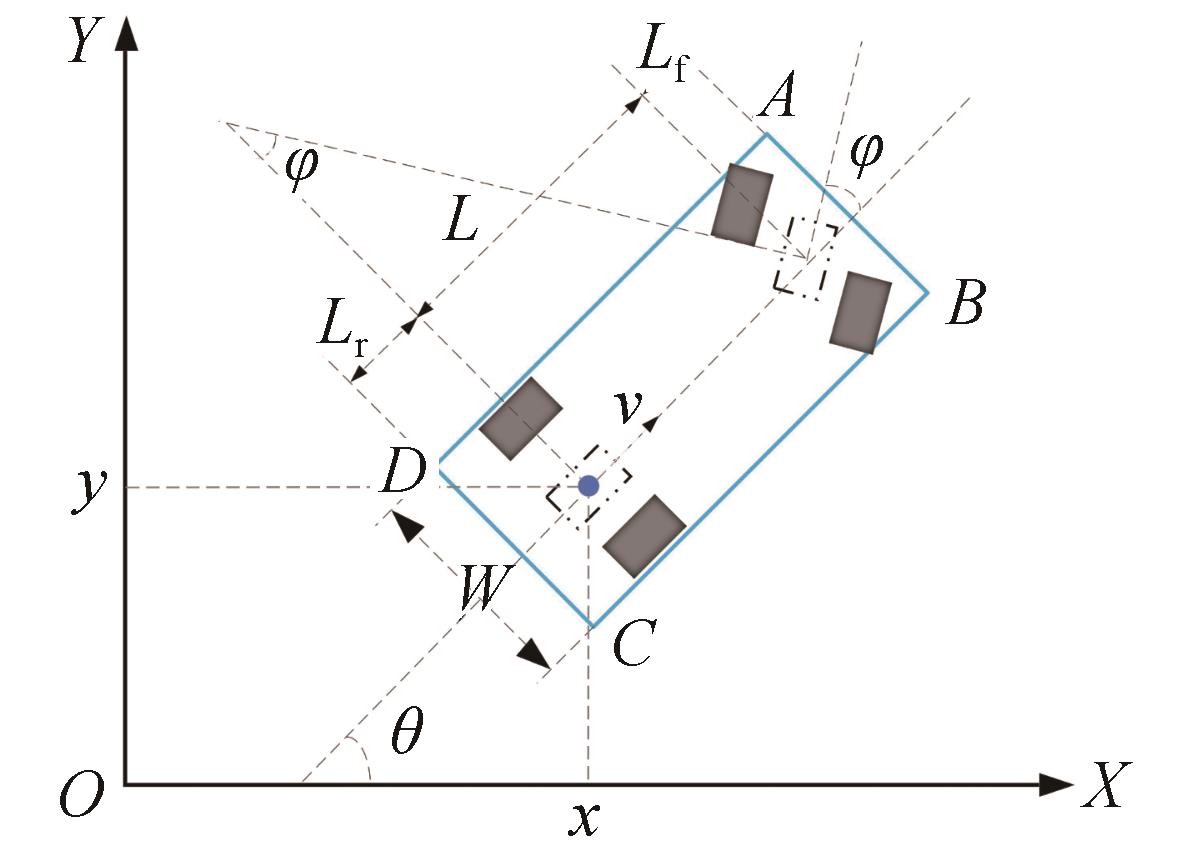
| 车位长 | SL | m | 6 |
| 车位宽 | SW | m | 2.5 |
| 道路宽度 | CL | m | 4 |
"
"
"

"

"


"


"

"
| 场景 | 起始位姿和车位尺寸 |
|---|---|
| 场景二 | |
| 场景三 | |
| 场景四 | |
| 场景五 |

"

"
| 方法 | 没有 初值 | 双层求解策略 | 文献[ | |||||
|---|---|---|---|---|---|---|---|---|
| CPU time | 初始路径CPU time | CPU time | CPU time* | 泊车 时间 | CPU time | CPU time* | 泊车 时间 | |
| 场景一 | 失败 | 0.311 s | 5.725 s | 0.866 s | 24.20 s | 失败 | 6.524 s | 25.56 s |
| 场景二 | 失败 | 0.173 s | 5.226 s | 0.758 s | 18.94 s | 失败 | 失败 | 失败 |
| 场景三 | 失败 | 0.102 s | 5.318 s | 0.792 s | 16.22 s | 失败 | 7.112 s | 25.96 s |
| 场景四 | 失败 | 0.241 s | 5.882 s | 0.924 s | 25.21 s | 失败 | 9.189 s | 25.67 s |
| 场景五 | 失败 | 0.272 s | 6.021 s | 1.198 s | 32.23 s | 失败 | 失败 | 失败 |
| 1 | ESKANDARIAN A, WU C, SUN C. Research advances and challenges of autonomous and connected ground vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 683-711. |
| 2 | GONZALEZ D, PEREZ J, MILANES V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 1135-1145. |
| 3 | 任秉韬,王淅淅,邓伟文,等. 基于混合A*和可变半径RS曲线的自动泊车路径优化方法[J]. 中国公路学报,2022,35(7):317-327. |
| REN Bingtao, WANG Xixi, DENG Weiwen, et al. Path optimization on algorithm for automatic parking based in hybrid A* and reeds-sheep curve with variable radius[J]. China Journal of Highway and Transport, 2022,35(7):317-327. | |
| 4 | HE J, LI H. Fast A* anchor point based path planning for narrow space parking[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). Indianapolis, IN, USA: IEEE, 2021: 1604-1609. |
| 5 | HAN L, DO Q H, MITA S. Unified path planner for parking an autonomous vehicle based on RRT[C]. 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011: 5622-5627. |
| 6 | DONG Y, ZHONG Y, HONG J. Knowledge-biased sampling-based path planning for automated vehicles parking[J]. IEEE Access, 2020, 8: 156818-156827. |
| 7 | 胡勤明,王金刚,张小俊.五次多项式优化的平行泊车路径规划[J].计算机工程与应用,2022,58(14):291-298. |
| HU Qinming, WANG Jingang, ZHANG Xiaojun. Optimized parallel parking path planning based on quintic polynomial[J]. Computer Engineering and Applications, 2022,58(14):291-298. | |
| 8 | CHAND A, KAWANISHI M, NARIKIYO T. Application of sigmoidal gompertz curves in reverse parallel parking for autonomous vehicles[J]. International Journal of Advanced Robotic Systems, 2015,12(9):1-9. |
| 9 | 张家旭,赵健,施正堂,等.基于回旋曲线的平行泊车路径规划和跟踪控制[J].吉林大学学报(工学版),2020,50(6): 2247-2257. |
| ZHANG Jiaxu, ZHAO Jian, SHI Zhengtang, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University (Engineering and Technology Edition),2020,50(6):2247-2257. | |
| 10 | 李红,王文军,李克强.基于B样条理论的平行泊车路径规划[J].中国公路学报,2016,29(9):143-151. |
| LI Hong, WANG Wenjun, LI Keqiang. Path planning for parallel parking based on B spline theory[J]. China Journal of Highway and Transport, 2016,29(9):143-151. | |
| 11 | SUZUKI T, USAMI R, MAEKAWA T. Automatic two-lane path generation for autonomous vehicles using quartic B-spline curves[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(4): 547-558. |
| 12 | KHOSHNEJAD M, DEMIRLI K. Autonomous parallel parking of a car-like mobile robot by a neuro-fuzzy behavior-based controller[C]. NAFIPS 2005 - 2005 Annual Meeting of the North American Fuzzy Information Processing Society. Detroit, MI, USA: IEEE, 2005: 814-819. |
| 13 | CHAI R, TSOURDOS A, SAVVARIS A, et al. Design and implementation of deep neural network-based control for automatic parking maneuver process[J]. IEEETransactions on Neural Networks and Learning Systems, 2022,33(4):1400-1413. |
| 14 | LI B, SHAO Z. A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles[J]. Knowledge-Based Systems, 2015, 86: 11-20. |
| 15 | 胡杰,朱令磊,陈瑞楠,等.狭小车位平行泊车路径规划方法研究[J].汽车工程,2022,44(7):1040-1048. |
| HU Jie, ZHU Linglei, Chen Ruinan, et al. Research on parallel parking path planning method for narrow parking space[J]. Automotive Engineering, 2022,44(7):1040-1048. | |
| 16 | CHAI R, SAVVARIS A, TSOURDOS A. Violation learning differential evolution-based hp-adaptive pseudospectral method for trajectory optimization of space maneuver vehicle[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 2031-2044. |
| 17 | CHEN C, WU B, XUAN L, et al. A trajectory planning method for autonomous valet parking via solving an optimal control problem[J]. Sensors, 2020, 20(22): 6435. |
| 18 | LI B, ZHANG Y, SHAO Z. Spatio-temporal decomposition: a knowledge-based initialization strategy for parallel parking motion optimization[J]. Knowledge-Based Systems, 2016, 107: 179-196. |
| 19 | LI B, WANG K, SHAO Z. Time-optimal maneuver planning in automatic parallel parking using a simultaneous dynamic optimization approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11): 3263-3274. |
| 20 | CHAI R, TSOURDOS A, SAVVARIS A, et al. Two-stage trajectory optimization for autonomous ground vehicles parking maneuver[J]. IEEE Transactions on Industrial Informatics, 2019, 15(7): 3899-3909. |
| 21 | RAO Anil. A survey of numerical methods for optimal control[J]. Advances in the Astronautical Sciences, 2010.135. |
| 22 | BIEGLER L T. Nonlinear programming: concepts, algorithms, and applications to chemical processes[M]. Society for Industrial and Applied Mathematics, 2010. |
| 23 | DOLGOV D, THRUN S, MONTEMERLO M, et al. Path planning for autonomous vehicles in unknown semi-structured environments[J]. The International Journal of Robotics Research, 2010, 29(5): 485-501. |
| 24 | REEDS J, SHEPP L. Optimal paths for a car that goes both forwards and backwards[J]. Pacific Journal of Mathematics, 1990, 145(2): 367-393. |
| [1] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [2] | Jie Hu, Zhihao Zhang, Ruinan Chen, Ruipeng Chen, Haoyan Liu, Qi Zhu, Hui Chen. Spatio-temporal Joint Planning Method of Intelligent Vehicles Based on Improved Hybrid A [J]. Automotive Engineering, 2023, 45(7): 1123-1133. |
| [3] | Ping Liu, Zhuo Chen, Mingjie Liu, Changhao Piao, Soohyun Jang, Kailin Wan. Gauss Allocation Points Parameterization Parallel Automatic Parking Trajectory Planning for Vehicle Under Multi-Stage Constraints [J]. Automotive Engineering, 2023, 45(7): 1163-1173. |
| [4] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [5] | Lijun Qian,Chen Chen,Jian Chen. Centralized Trajectory Planning in an Unsignalized Intersection Environment Considering Driver Error [J]. Automotive Engineering, 2023, 45(5): 768-776. |
| [6] | Lijun Qian,Chen Chen,Jian Chen,Xinyu Chen,Chi Xiong. Discrete Platoon Control at an Unsignalized Intersection Based on Q-learning Model [J]. Automotive Engineering, 2022, 44(9): 1350-1358. |
| [7] | Jie Hu,Linglei Zhu,Ruinan Chen,Xinkai Zhong,Wencai Xu,Minchao Zhang. Research on Parallel Parking Path Planning Method for Narrow Parking Space [J]. Automotive Engineering, 2022, 44(7): 1040-1048. |
| [8] | Bin Tang,Zhanxiang Xu,Haobin Jiang,Yingfeng Cai,Zitian Hu,Zhengyi Yang. Trajectory Planning of Intelligent Vehicles in Lane Change for Collision Avoidance Based on Segmented Optimization [J]. Automotive Engineering, 2022, 44(6): 831-841. |
| [9] | Jiaxing Yu,Arab Aliasghar,Xiaofei Pei,Xuexun Guo. Research on Cornering Trajectory Planning for Intelligent Vehicle Considering Trajectory Smoothness and Stability for Collision Avoidance [J]. Automotive Engineering, 2022, 44(5): 656-663. |
| [10] | Jie Hu,Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu. Parallel Parking Trajectory Planning for Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(3): 330-339. |
| [11] | Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. |
| [12] | Zhijun Gao,Jiangfeng Wang,Lei Chen,Jiakuan Dong,Dongyu Luo,Xuedong Yan. Trajectory Planning Algorithm for CAV at Intersections Based on Dynamic Distance Windows [J]. Automotive Engineering, 2021, 43(4): 537-545. |
| [13] | Jiaxu Zhang,Chen Wang,Chong Guo,Fei Teng,Dongran Li. column:Vehicle Parallel Parking Path Planning Based on Adaptive Neuro⁃fuzzy Inference System [J]. Automotive Engineering, 2021, 43(3): 323-329. |
| [14] | Zhang Jiaxu, Shi Zhengtang, Zhao Jian, Zhu Bing. Optimal Control Strategy Design for Vehicle High-speed Emergency Lane Change Collision Avoidance Based on Radau Pseudospectral Method [J]. Automotive Engineering, 2020, 42(8): 1040-1049. |
| [15] | Gao Zhenhai, Zhu Naixuan, Gao Fei, Mei Xingtai, Zhang Jin, He Lei. Self-learning Lane-change Trajectory Planning System with Driver Characteristics [J]. Automotive Engineering, 2020, 42(12): 1710-1717. |
|