Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (7): 978-986.doi: 10.19562/j.chinasae.qcgc.2021.07.004
Previous Articles Next Articles
Guochen Niu( ),Wenshuai Li,Hongxu Wei
),Wenshuai Li,Hongxu Wei
Received:2020-09-02
Revised:2021-01-27
Online:2021-07-25
Published:2021-07-20
Contact:
Guochen Niu
E-mail:niu_guochen@139.com
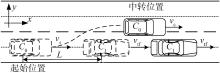
Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials[J].Automotive Engineering, 2021, 43(7): 978-986.
"
"
"
"
"


"
"
"
| 参数 | 数值 |
|---|---|
| 车辆长度/m | 4.50 |
| 车辆宽度/m | 1.75 |
| 整车质量/kg | 1 270 |
| 质心到前轴距离/m | 1.30 |
| 质心到后轴距离/m | 1.60 |
| 转动惯量/(kg· | 3 610 |
| 前后轮胎滑移率 | 0.15 |
| 道路宽度/m | 3.75 |
| 换道纵向位移/m | 100 |
| 横向加速度最值/( | 2.00 |
| 纵向加速度最值/( | 2.50 |

"

"

"

"

"
"

"

"


"
| 1 | ZHU C, ZHONG S, MA S, et al. Two⁃lane lattice hydrodynamic model considering the empirical lane⁃changing rate [J]. Communications in Nonlinear Science and Numerical Simulation ,2019,73(7):229-243. |
| 2 | MEHMOOD A, LIAQUAT M, BHATTI A I, et al. Trajectory planning and control for lane⁃change of autonomous vehicle [C]. 2019 5th International Conference on Control, Automation and Robotics (ICCAR) ,2019:331-335. |
| 3 | PANOV A I, YAKOVLEV K S, SUVOROV R. Grid path planning with deep reinforcement learning: preliminary results [J]. Procedia Computer Science,2018,123:347-353. |
| 4 | 曹昊天,宋晓琳,黄江.基于弹性绳理论的自主车辆防碰撞的路径规划 [J] . 汽车工程,2014,36(10):1230-1236. |
| CAO H T,SONG X L,HUANG J. Path planning of autonomous vehicle for collision avoidance based on elastoplast theory [J].Automotive Engineering ,2014,36(10):1230-1236. | |
| 5 | CHOI Y, LIM K, KIM J, et al. Lane change and path planning of autonomous vehicles using GIS [C]. International Conference on Ubiquitous Robots & Ambient Intelligence. IEEE,2015:163-166. |
| 6 | 王威,陈慧岩,马建昊,等.基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪 [J].兵工学报,2019,40(11):2336-2351. |
| WANG W, CHEN H Y, MA J H, et al. Intelligent vehicle path tracking based on Frenet coordinate system and control delay compensation [J]. Acta Armamentarii ,2019,40(11):2336-2351. | |
| 7 | BU X, SU H, ZOU W, et al. Curvature continuous path smoothing based on cubic Bezier curves for car⁃like vehicles [C]. International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, 2015: 1453-1458. |
| 8 | TAKAHASHI A , HONGO T , NINOMIYA Y , et al. Local path planning and motion control for agv in positioning [C]. Intelligent Robots and Systems, 1989: 392-397. |
| 9 | PENG T, SU L, ZHANG R, et al. A new safe lane⁃change trajectory model and collision avoidance control method for automatic driving vehicles [J]. Expert Systems with Applications, 2019, 141:112953. |
| 10 | HUANG Y , WANG H , KHAJEPOUR A , et al. A novel local motion planning framework for autonomous vehicles based on resistance network and model predictive control [J]. IEEE Transactions on Vehicular Technology, 2020, 69(1):55-66. |
| 11 | LI T, WU J, CHAN C, et al. A cooperative lane change model for connected and automated vehicles [J]. IEEE Access, 2020,8:54940-54951. |
| 12 | ZHOU J, ZHENG H, WANG J, et al. Multi⁃objective optimization of lane⁃changing strategy for intelligent vehicles in complex driving environments [J]. IEEE Transactions on Vehicular Technology, 2020,69(2):1291-1308. |
| 13 | SONG X, CAO H, HUANG J. Vehicle path planning in various driving situations based on the elastic band theory for highway collision avoidance [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013,227(12):1706-1722. |
| 14 | WU C S, CHIU Z Y, LIU J S. Simulations for time⁃optimal trajectory planning along parametric polynomial lane⁃change curves for a unicycle [C]. 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2017: 2173-2178. |
| 15 | SHIM T, ADIREDDY G, YUAN H. Autonomous vehicle collision avoidance system using path planning and model⁃predictive⁃control⁃based active front steering and wheel torque control [J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2012,226(6):767-778. |
| 16 | 孙扬. 无人驾驶车辆智能水平的定量评价[D].北京:北京理工大学,2014. |
| SUN Y. Quantitative evaluation of the level of intelligent driverless vehicles [D].Beijing: Beijing Institute of Technology,2014. | |
| 17 | 李玮,王晶,段建民.基于多项式的智能车辆换道轨迹规划[J].计算机工程与应用,2012,48(3):242-245. |
| LI W,WANG J,DUAN J M. Lane changing trajectory planning of intelligent vehicles based on polynomials [J]. Computer Enginee⁃ring and Applications,2012,48(3):242-245. | |
| 18 | CHEN L, QIN D, XU X, et al. A path and velocity planning method for lane changing collision avoidance of intelligent vehicle based on cubic 3⁃D Bezier curve [J]. Advances in Engineering Software, 2019,132(6):65-73. |
| 19 | 游峰,谷广.面向无人驾驶的车辆协同换道轨迹规划[J].科学技术与工程,2018,18(15):155-161. |
| YOU F, GU G. Coordinated lane⁃changing trajectory planning for driverless vehicles [J]. Science and Technology and Engineering, 2018,18(15):155-161. | |
| 20 | HASSANZADEH M, LIDBERG M R, KESHAVARZ M, et al. Path and speed control of a heavy vehicle for collision avoidance manoeuvres [C]. Intelligent Vehicles Symposium. IEEE,2012:129-134. |
| 21 | 中华人民共和国标准. 人体全身振动暴露的舒适性降低界限和评价准则:[S]. 北京:中国质检出版社, 2007. |
| Standards of the People’s Republic of China. Mechanical vibration and shock⁃Evaluation of human exposure to whole⁃body vibration:[S]. Beijing : China Quality Inspection Press, 2007. | |
| 22 | 叶柏年.点的加加速度[J].力学与实践,1988(5):51-53. |
| YE B N. Acceleration of points [J]. Physics and Engineering, 1988(5): 51-53. |
| [1] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [2] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [3] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [4] | Lin Hu,Gen Li,Fang Wang,Miao Lin,Ning Wu. Research on Test Scenarios of Passenger Cars and Two-Wheelers at Intersections Based on CIDAS Accident Data [J]. Automotive Engineering, 2023, 45(8): 1417-1427. |
| [5] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [6] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [7] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [8] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [9] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [10] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [11] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [12] | Lijun Qian,Chen Chen,Jian Chen. Centralized Trajectory Planning in an Unsignalized Intersection Environment Considering Driver Error [J]. Automotive Engineering, 2023, 45(5): 768-776. |
| [13] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [14] | Xiang Gao,Long Chen,Xinye Wang,Xiaoxia Xiong,Yicheng Li,Yuexia Chen. Intelligent Vehicle Driving Risk Assessment Method Based on Trajectory Prediction [J]. Automotive Engineering, 2023, 45(4): 588-597. |
| [15] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |