Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (6): 997-1009.doi: 10.19562/j.chinasae.qcgc.2023.06.010
Special Issue: 底盘&动力学&整车性能专题2023年
Previous Articles Next Articles
Yinghong Yu1,2,Li Huang1,Yinong Li2( ),Ling Zheng2,Jia Zhou1,Yixiao Liang2
),Ling Zheng2,Jia Zhou1,Yixiao Liang2
Received:2022-11-14
Online:2023-06-25
Published:2023-06-16
Contact:
Yinong Li
E-mail:ynli@cqu.edu.cn
Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling[J].Automotive Engineering, 2023, 45(6): 997-1009.
"

"

"

"
"

"

"

"

"

"

"

"
"
| 参数 | 数值 |
|---|---|
| 整车质量 | 1 370 kg |
| 质心至前轴的距离 | 1.11 m |
| 质心至后轴的距离 | 1.67 m |
| 空气阻力系数 | 0.35 |
| 前轴等效转向刚度 | 67 553 N·m/rad |
| 后轴等效转向刚度 | 49 506 N·m/rad |
| 横摆转动惯量 | 2 315.3 kg/m2 |

"

"


"

"

"
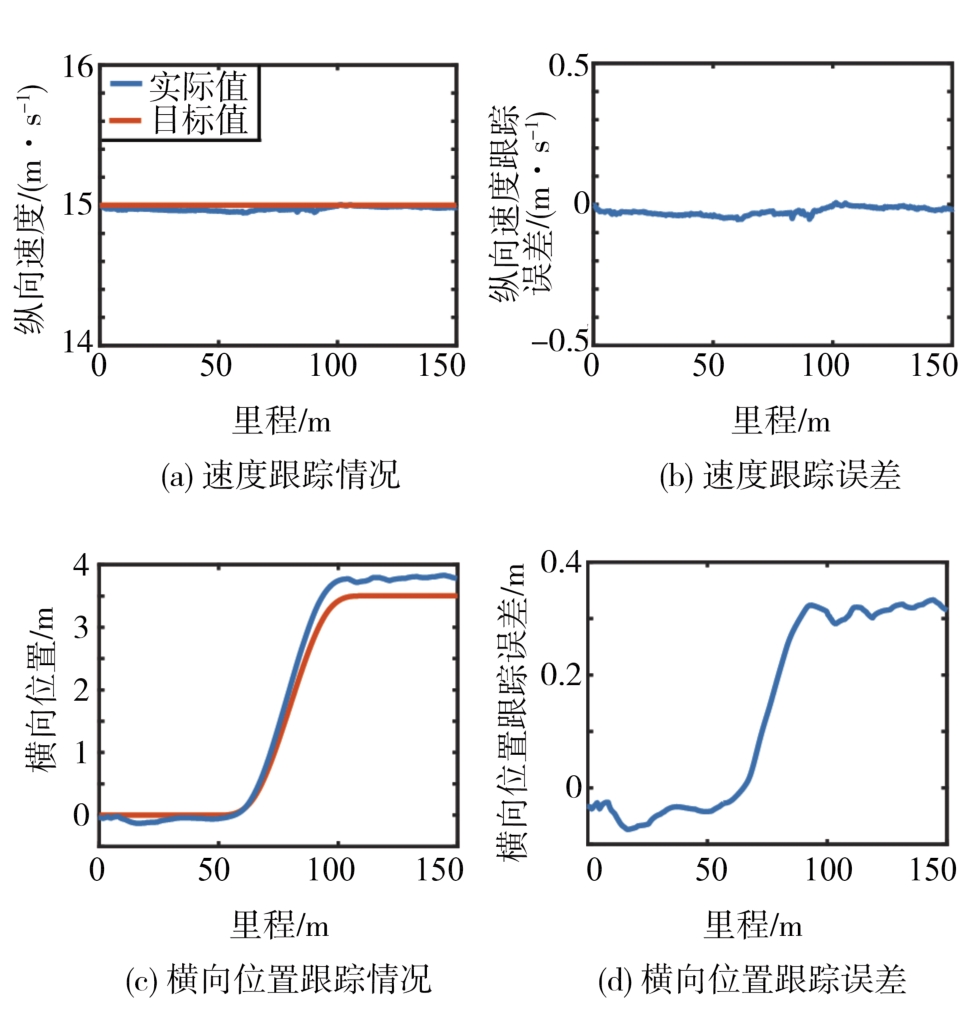
| 控制器 | 最大误差/ | 最小误差/ | 均方误差/ |
|---|---|---|---|
| 解耦循迹跟踪 | 0.029 8 | -0.030 6 | 0.000 3 |
| 集成式MPC | 0.085 4 | -0.102 4 | 0.001 4 |
| 协同式纯跟踪 | 0.038 5 | -0.022 2 | 0.000 1 |

"


"
"


"
| 1 | 熊璐,杨兴,卓桂荣,等.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报,2020,56(10):127-143. |
| XIONG L, YANG X, ZHUO G R, et al. Overview of the development status of motion control of driverless vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10):127-143. | |
| 2 | 方培俊,蔡英凤,陈龙,等.基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法[J].汽车工程,2022,44(10):1469-1483,1510. |
| FANG P J, CAI Y F, CHEN L, et al. Trajectory tracking control method based on vehicle dynamics hybrid model for intelligent vehicle[J]. Automotive Engineering, 2022, 44(10): 1469-1483,1510. | |
| 3 | 卢少波,谢菲菲,张博涵,等.基于非对称势场的人车协同博弈避撞[J].汽车工程,2022,44(10):1484-1493. |
| LU S B, XIE F F, ZHANG B H, et al. Human-vehicle cooperative game collision avoidance based on asymmetric potential fields[J]. Automotive Engineering, 2022, 44(10): 1484-1493. | |
| 4 | CHEN Q P, XIE Y F, GUO S F, et al. Sensing system of environmental perception technologies for driverless vehicle: a review of state of the art and challenges [J]. Sensors and Actuators A: Physical, 2021, 319, 112566:1-18. |
| 5 | SAMUEL M, HUSSEIN M, MOHAMAD M. A review of some pure-pursuit based path tracking techniques for control of autonomous vehicle[J]. International Journal of Computer Applications, 2016, 135: 35-38. |
| 6 | WANG R C, YE Q, CAI Y F, et al. Analyzing the influence of automatic steering system on the trajectory tracking accuracy of intelligent vehicle[J]. Advances in Engineering Software, 2018, 121: 188-196. |
| 7 | THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23: 661-692. |
| 8 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15: 566-580. |
| 9 | TURRI V, CARVALHO A, TSENG H E, et al. Linear model predictive control for lane keeping and obstacle avoidance on low curvature roads[C]. 16th International IEEE Conference on Intelligent Transportation Systems, 2013: 378-383. |
| 10 | ATTIA R, ORJUELA R, BASSET M, et al. Combined longitudinal and lateral control for automated vehicle guidance[J]. Vehicle System Dynamics, 2014, 52: 261-279. |
| 11 | KANAYAMA Y, KIMURA Y, MIYAZAKI F, et al. A stable tracking control method for an autonomous mobile robot[C]. IEEE International Conference on Robotics and Automation, 1990, 1: 384-389. |
| 12 | MENHOUR L, DANDREANOVEL B, FLIESS M, et al. Coupled nonlinear vehicle control: flatness-based setting with algebraic estimation techniques[J]. Control Engineering Practice, 2014, 22: 135-146. |
| 13 | GAO Y, GRAY A, TSENG H E, et al. A tube-based robust nonlinear predictive control approach to semiautonomous ground vehicles[J]. Vehicle System Dynamics, 2014, 52: 802-823. |
| 14 | BROWN M, GERDES J C. Coordinating tire forces to avoid obstacles using nonlinear model predictive control[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5: 21-31. |
| 15 | MARINO R, SCALZI S. Asymptotic sideslip angle and yaw rate decoupling control in four-wheel steering vehicles[J]. Vehicle System Dynamics, 2010, 48: 999-1019. |
| 16 | ZHANG H, ZHAO W. Decoupling control of steering and driving system for in-wheel-motor-drive electric vehicle[J]. Mechanical Systems and Signal Processing, 2018, 101: 389-404. |
| 17 | WANG C, ZHAO W, LUAN Z, et al. Decoupling control of vehicle chassis system based on neural network inverse system[J]. Mechanical Systems and Signal Processing, 2018, 106: 176-197. |
| 18 | 梁艺潇,李以农,余颖弘,等.基于神经网络逆系统的智能汽车纵横向解耦控制[J].湖南大学学报(自然科学版),2019,46(10):26-35. |
| LIANG Y X, LI Y N, YU Y H, et al. Decoupling control of longitudinal and lateral motion for intelligent vehicle based on neural network inverse method[J]. Journal of Hunan University (Natural Sciences), 2019, 46(10): 26-35. | |
| 19 | LIM E, HEDRICK J K. Lateral and longitudinal vehicle control coupling for automated vehicle operation[C]. American Control Conference, 1999, 5: 3676-3680. |
| 20 | 李春文,苗原,冯元琨,等.非线性系统控制的逆系统方法(I)——单变量控制理论[J].控制与决策,1997(5):529-535. |
| LI C W, MIAO Y, FENG Y K, et al. Inverse system approach to nonlinear system control (I) - univariate control theory[J]. Control and Decision, 1997(5): 529-535. | |
| 21 | 谭海鑫. 电动汽车纵横向动力学系统解耦控制研究[D]. 重庆: 重庆交通大学,2019. |
| TAN H X. Research on decoupling control of longitudinal and lateral dynamics system for electric vehicle[D]. Chongqing: Chongqing Jiaotong University, 2019. | |
| 22 | 朱熀秋,顾志伟.基于模糊神经网络逆系统的五自由度无轴承永磁同步电机自抗扰控制[J].电机与控制学报,2021,25(2):72-81. |
| ZHU H Q, GU Z W. Active disturbance rejection control for 5-degree-of-freedom bearingless permanent magnet synchronous motor based on inverse system using the fuzzy neural network[J]. Electric Machines and Control, 2021, 25(2): 72-81. | |
| 23 | 朱熀秋,杜伟.基于模糊神经网络逆系统的无轴承永磁同步电机解耦控制[J].中国电机工程学报,2019,39(4):1190-1198. |
| ZHU H Q, DU W. Decoupling control of bearingless permanent magnet synchronous motor based on inverse system using the adaptive neural-fuzzy inference system[J]. Proceedings of the CSEE, 2019, 39(4): 1190-1198. | |
| 24 | 陈林,杨泽斌,陈正,等.五自由度无轴承异步电机动态解耦控制[J].江苏科技大学学报(自然科学版),2017,31(1): 88-94. |
| CHEN L, YANG Z, CHEN Z, et al. Dynamic decoupling control of 5-degree-of-freedombearingless induction motor[J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2017,31(1): 88-94. | |
| 25 | 孙宇新,杨玉伟.无轴承异步电机非线性滤波器自适应逆解耦控制[J].农业工程学报,2016,32(14): 76-83. |
| SUN Y X, YANG Y W. Adaptive inverse decoupling control for bearingless induction motors based on nonlinear filter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(14): 76-83. | |
| 26 | 黄守道,管晓文,佘峰.永磁型无轴承电机解耦控制策略研究[J].控制工程,2010, 17(5): 603-606,639. |
| HUANG S D, GUAN X W, SHE F. On decoupling control strategy of permanent magnet bearingless motor[J]. Control Engineering of China, 2010, 17(5): 603-606,639. |
| [1] | Jie Hu, Haihua Qing, Min Wei, Huangzheng Geng, Xiao Zhang, Lin Chen. Research on Vehicle Diagnostic Trouble Code Decoupling Method Based on Multidimensional Association Rule [J]. Automotive Engineering, 2024, 46(1): 161-169. |
| [2] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [3] | Yuan Zou,Wenjing Sun,Xudong Zhang,Jiahui Liu,Ya Wen,Wenbin Ma. Study on the Technology Development of Multi-Domain Electrical and Electronic Architecture for Intelligent Networked Vehicles [J]. Automotive Engineering, 2023, 45(6): 895-909. |
| [4] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [5] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |
| [6] | Shukai Zhang,Hui Chen,Meicen Liu. Control Method of Path Following for Automatic Parking System [J]. Automotive Engineering, 2022, 44(7): 1027-1039. |
| [7] | Daofei Li,Anfei Zha,Biao Xu,Jiajie Zhang. Trajectory Tracking Control Algorithm of Emergency Collision Avoidance for Tractor Semi-trailer Combination [J]. Automotive Engineering, 2022, 44(7): 1098-1106. |
| [8] | Pengfei Li,Yugong Luo,Chang Liu,Weiwei Kong. Control Strategies Design of Intelligent and Connected Vehicle Platoon Under Emergency Conditions [J]. Automotive Engineering, 2022, 44(3): 299-307. |
| [9] | Peijun Fang,Yingfeng Cai,Long Chen,Yubo Lian,Hai Wang,Yilin Zhong,Xiaoqiang Sun. Trajectory Tracking Control Method Based on Vehicle Dynamics Hybrid Model for Intelligent Vehicle [J]. Automotive Engineering, 2022, 44(10): 1469-1483. |
| [10] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [11] | Hongwei Wang,Chenyu Liu,Lei Li,Haotian Zhang. Research on Trajectory Tracking Control of Unmanned Vehicle Based on Efficient NMPC Algorithm [J]. Automotive Engineering, 2022, 44(10): 1494-1502. |
| [12] | Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. |
| [13] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [14] | Long Chen,Kai Zou,Yingfeng Cai,Chenglong Teng,Xiaoqiang Sun,Hai Wang. Longitudinal and Lateral Comprehensive Trajectory Tracking Control of Intelligent Vehicles Based on NMPC [J]. Automotive Engineering, 2021, 43(2): 153-161. |
| [15] | Xiangmo Zhao,Xinrui Zhang,Runmin Wang,Zhigang Xu,Haijin Fan. Cooperative Optimization Control Method of Traffic Signals and Vehicle Trajectories at Connected Intersection [J]. Automotive Engineering, 2021, 43(11): 1577-1586. |