Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (6): 1010-1021.doi: 10.19562/j.chinasae.qcgc.2023.06.011
Special Issue: 底盘&动力学&整车性能专题2023年
Previous Articles Next Articles
Yunfei Zha1( ),Lü Xiaolong1,Huiqin Chen2,Yingchun Yi1,Yanyan Wang1
),Lü Xiaolong1,Huiqin Chen2,Yingchun Yi1,Yanyan Wang1
Received:2023-03-04
Revised:2023-04-03
Online:2023-06-25
Published:2023-06-16
Contact:
Yunfei Zha
E-mail:zhayf@fjut.edu.cn
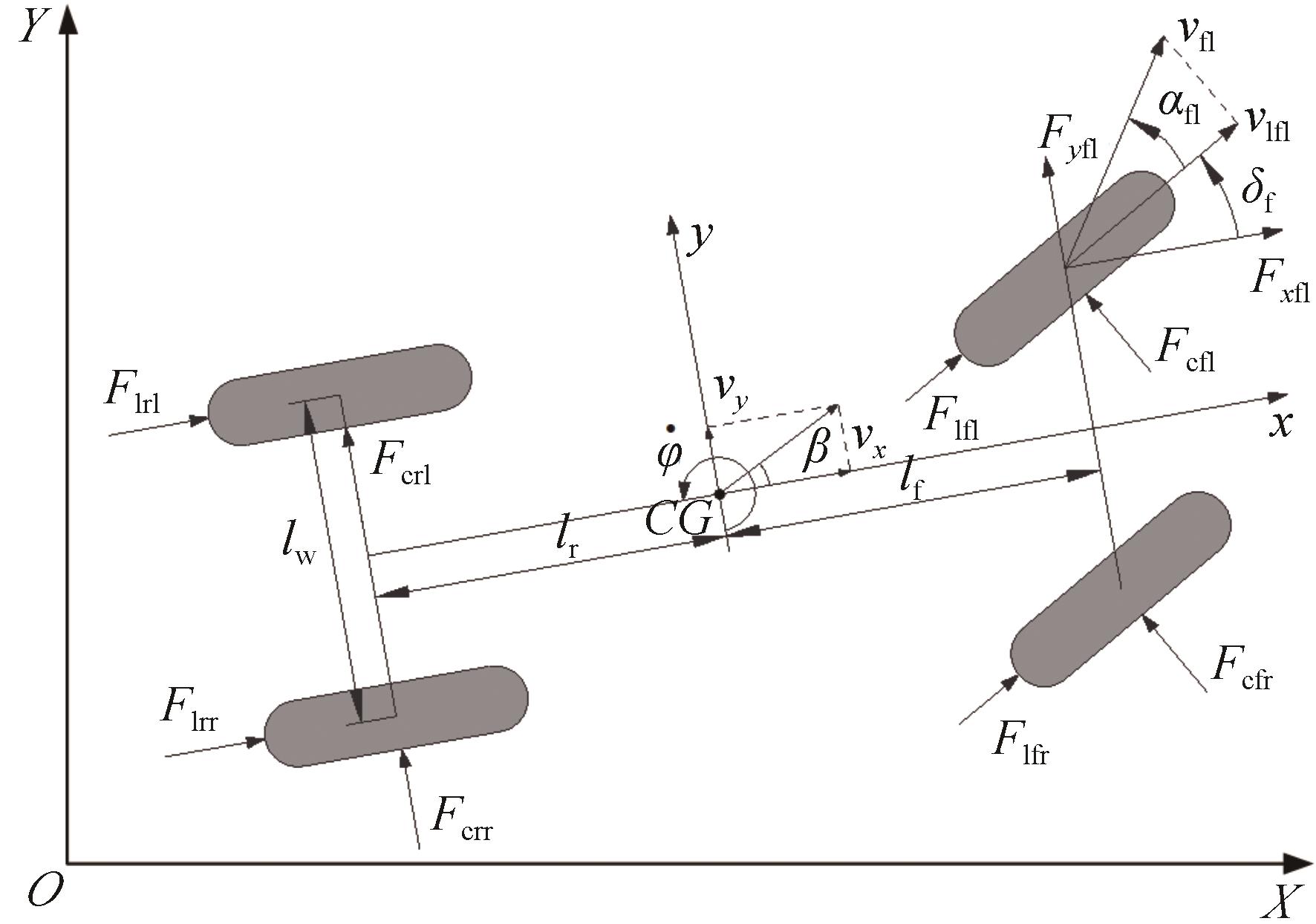
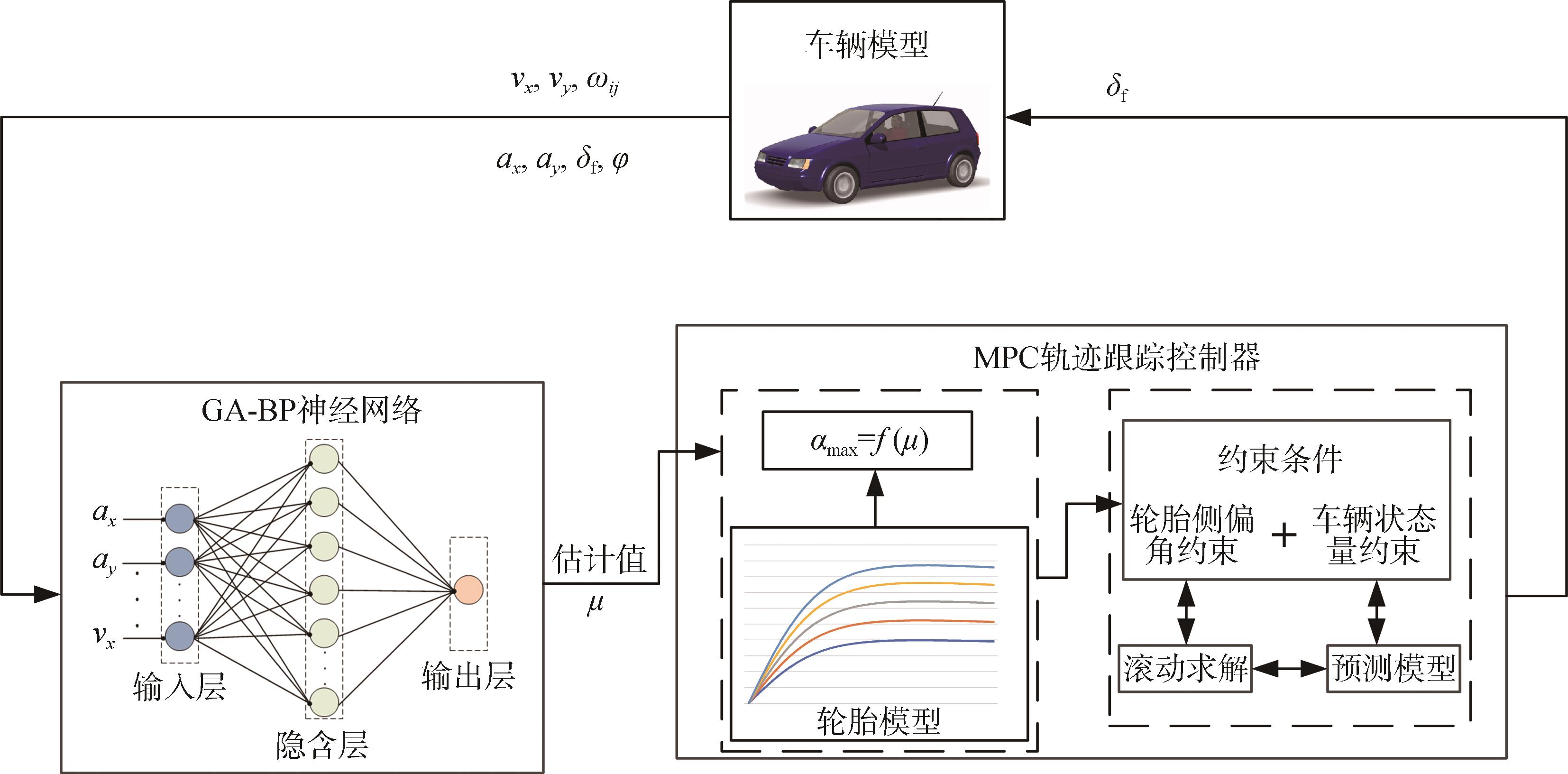
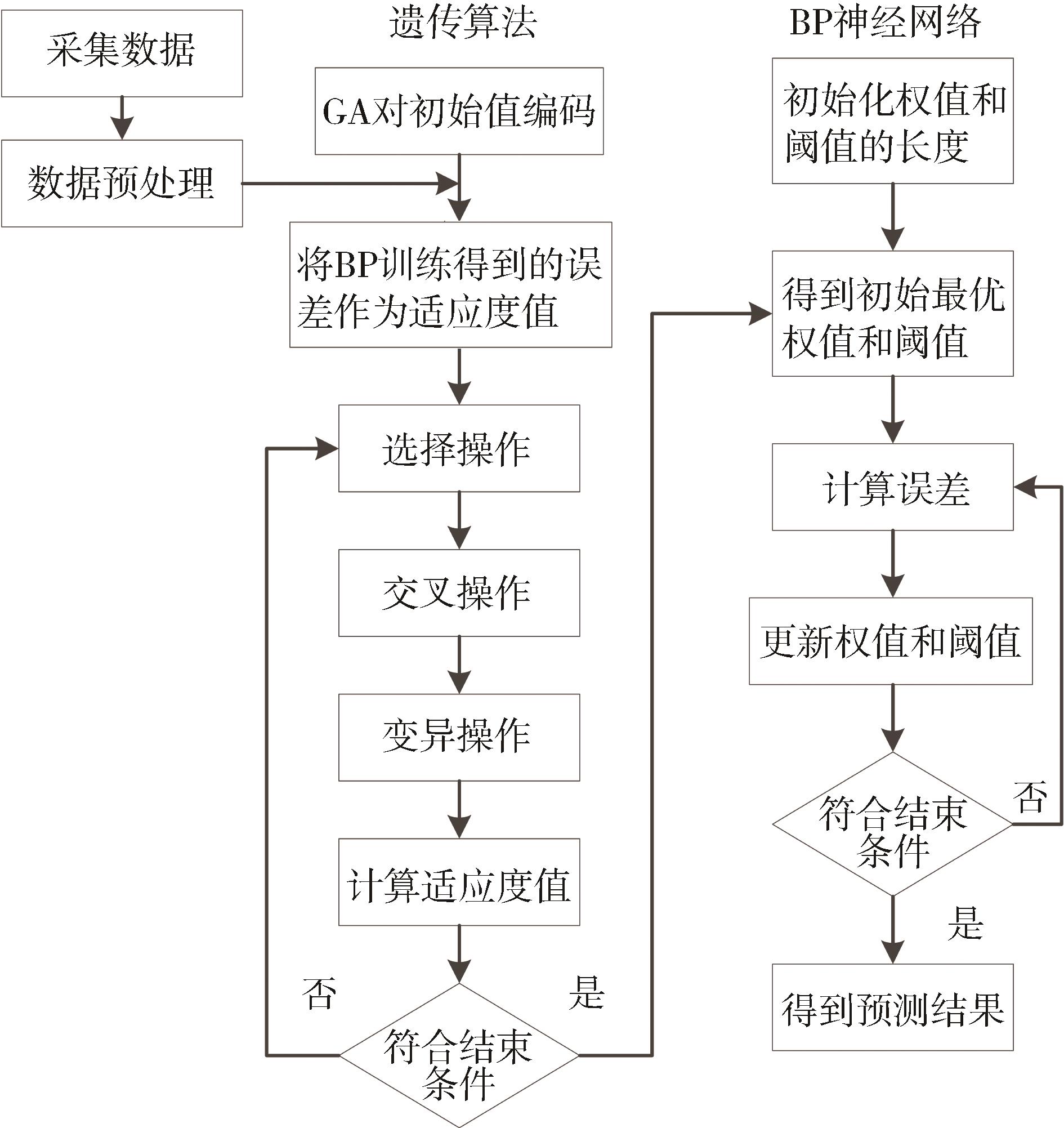
Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation[J].Automotive Engineering, 2023, 45(6): 1010-1021.

"

"
"
"
| 路面附着系数 | 行驶速度/(km·h-1) |
|---|---|
| 0.3 | 50 |
| 0.5 | 60 |
| 0.7 | 70 |
| 0.9 | 80 |

"


"


"


"

"
| 路面附着系数 | 最大侧偏角/(°) | 路面附着系数 | 最大侧偏角/(°) |
|---|---|---|---|
| 0.1 | 1.15 | 0.6 | 5.33 |
| 0.2 | 2.08 | 0.7 | 6.05 |
| 0.3 | 2.93 | 0.8 | 6.61 |
| 0.4 | 3.76 | 0.9 | 7.23 |
| 0.5 | 4.57 |

"


"


"

"
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| Hp | 15 | [-10,10] | |
| Hc | 1 | [-0.8,0.8] | |
| T/s | 0.02 | 1 000 | |
| Q | [1500 0;0 70] | R | 500 |

"
"


"

| 1 | WANG B, LIN C, LIANG S, et al. Hierarchical model predictive control for autonomous collision avoidance of distributed electric drive vehicle with lateral stability analysis in extreme scenarios[J]. World Electric Vehicle Journal, 2021, 12(4):192-207. |
| 2 | GUO J H, LI K Q, LUO Y. Review on the research of motion control for intelligent vehicles [J]. Journal of Automotive Safety and Energy, 2016, 7(2): 151-159. |
| 3 | XU S, PENG H, TANG Y. Preview path tracking control with delay compensation for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(5):2979-2989. |
| 4 | 张雷,赵宪华,王震坡. 四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J]. 汽车工程, 2020, 42(11):68-76. |
| ZHANG Lei, ZHAO Xianhua, WANG Zhenpo. Study on coordinated control of trajectory tracking and yaw stability for autonomous four-wheel-independent- driving electric vehicles[J]. Automotive Engineering, 2020, 42(11): 68-76. | |
| 5 | WANG P, AN D, CHEN N,et al. Spatial path tracking controllers for autonomous ground vehicles: conventional and nonconventional schemes[J]. Guidance, Navigation and Control,2021,1(1):2150003. |
| 6 | ZHENG Z, SUN L. Adaptive sliding mode trajectory tracking control of robotic airships with parametric uncertainty and wind disturbance [J]. Journal of the Franklin Institute, 2018,355 (1):106-122. |
| 7 | LIU M, CHOUR K, RATHINAM S,et al. Lateral control of an autonomous and connected following vehicle with limited preview information[J].IEEE Transactions on Intelligent Vehicles,2020, 6(3): 406-418. |
| 8 | 查云飞,于淼,马芳武,等.基于线控转向的智能驾驶车辆路径跟踪研究[J].汽车技术,2021(3):7-13. |
| ZHA Yunfei, YU Miao, MA Fangwu, et al. Research on path-tracking for intelligent driving vehicle based on steering-by-wire[J]. Automobile Technology,2021(3):7-13. | |
| 9 | YOON Y, SHIN J, KIM H J, et al. Model-predictive active steering and obstacle avoidance for autonomous ground vehicles[J]. Control Engineering Practice, 2009, 17(7): 741-750. |
| 10 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Tansactions on Control Systems Technology, 2007,15(3):566-580. |
| 11 | 汪选要, 程义, 程煜, 等. 低附着系数路面车道保持模型预测控制及汽车稳定性控制[J]. 中国机械工程, 2019, 30(9): 1018-1025. |
| WANG Xuanyao, CHENG Yi, CHENG Yu, et al. Lane keeping model prediction control and vehicle stability control on low adhesion coefficient roads[J]. China Mechanical Engineering, 2019, 30(9): 1018-1025. | |
| 12 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 13 | 王艺, 蔡英凤, 陈龙, 等. 基于模型预测控制的智能网联汽车路径跟踪控制器设计[J]. 机械工程学报, 2019, 55(8):136-144,153. |
| WANG Yi, CAI Yingfeng, CHEN Long, et al. Design of intelligent and connected vehicle path tracking controller based on model predictive control [J]. Journal of Mechanical Engineering, 2019, 55(8):136-144,153. | |
| 14 | 李培庆,杨正龙,陈一锴, 等.变权重矩阵下的MPC轨迹跟踪研究[J].机床与液压,2022,50(7):62-68. |
| LI Peiqing, YANG Zhenglong, CHEN Yikai, et al. Research on MPC trajectory tracking under variable weight matrix [J]. Machine Tool &Hydraulics,2022,50(7) : 62-68. | |
| 15 | 严国军,贲能军,顾建华,等.基于MPC的无人驾驶拖拉机轨迹跟踪控制[J].重庆交通大学学报(自然科学版),2019,38(9):1-6. |
| YAN Guojun, BEN Nengjun,GU Jianhua, et al. Trajectory tracking control of intelligent tractor based on MPC algorithm[J]. Journal of Chongqing Jiaotong University(Natural Science) ,2019,38(9):1-6. | |
| 16 | HU C, QIN Y C, CAO H T, et al. Lane keeping of autonomous vehicles based on differential steering with adaptive multivariable super-twisting control[J]. Mechanical Systems and Signal Processing, 2019, 125: 330-346. |
| 17 | CHENG S, LI L, CHEN X, et al. Model-predictive- control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying [J]. IEEE Transactions on Industrial Electronics, 2020, 68(9):8695-8707. |
| 18 | MATA S, ZUBIZARRETA A, PINTO C. Robust tube-based model predictive control for lateral path tracking[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(4):569-577. |
| 19 | 张会琪,林棻,张华达.考虑动力学约束的智能车辆路径跟踪控制研究[J].重庆理工大学学报(自然科学),2018,32(8):58-63,87. |
| ZHANG Huiqi,LIN Fen,ZHANG Huada. Research on intelligent vehicle routing control system considering dynamic constraints[J]. Journal of Chongqing University of Technology (Natural Science), 2018, 32(8):58-63,87. | |
| 20 | LI Q, LIU L, YUAN X. Model predictive controller-based optimal slip ratio control system for distributed driver electric vehicle[J]. Mathematical Problems in Engineering, 2020, 12:1-15. |
| 21 | 辛喆,陈海亮,林子钰,等.智能汽车的路面附着极限横向轨迹跟踪控制[J].机械工程学报,2020,56(14):138-145. |
| XIN Zhe,CHEN Hailiang,LIN Ziyu,et al. Lateral trajectory following for automated vehicles at handling limits[J]. Journal of Mechanical Engineering, 2020,56(14):138-145. | |
| 22 | 李韶华,周军魏,张志达.轮胎三向动态特性试验及非线性建模[J].机械工程学报,2018,54(18):85-96. |
| LI Shaohua, ZHOU Junwei, ZHANG Zhida. Experiment and nonlinear modeling on tire dynamic characteristics of three directional[J]. Journal of Mechanical Engineering, 2018,54(18):85-96. | |
| 23 | HU J, RAKHEJA S, ZHANG Y. Tire-road friction coefficient estimation under constant vehicle speed control[J]. IFAC-Papers OnLine, 2019, 52(8): 136-141. |
| 24 | 林棻,王少博,赵又群,等.基于改进Keras模型的路面附着系数估计[J].机械工程学报,2021,57(12):74-86. |
| LIN Fen, WANG Shaobo, ZHAO Youqun, et al. Road friction coefficient estimation based on improved keras model [J]. Journal of Mechanical Engineering, 2021, 57(12):74-86. | |
| 25 | 梁旺,秦兆博,陈亮,等.基于改进BP神经网络的智能车纵向控制方法[J].汽车工程,2022,44(8):1162-1172. |
| LIANG Wang, QIN Zhaobo, CHEN Liang, et al. Longitudinal control method of intelligent vehicles based on the improved bp neural network[J]. Automotive Engineering, 2022,44(8):1162-1172. |
| [1] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [2] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [5] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [6] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [7] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [8] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [9] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [10] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [11] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |
| [12] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [13] | Yong Lu,Yichao He,He Tian,Kun Jiang,Diange Yang. Research on Longitudinal Acceleration Planning Method of Adaptive Cruise Control System for Mass Production [J]. Automotive Engineering, 2023, 45(10): 1803-1814. |
| [14] | Cheng Lin,Sheng Liang,Xinle Gong,Xiao Yu,Bowen Wang. Integrated Dynamic Control Strategy for Extreme Maneuvers of 4WIDEVs [J]. Automotive Engineering, 2022, 44(9): 1372-1385. |
| [15] | Shaobo Xie,Pengcheng Qu,Jiacheng Li,Huiqing Wang,Kun Lang. Study on Coordinated Control of Speed Planning and Energy Management for Connected Hybrid Electric Truck in Vehicle Following Scene [J]. Automotive Engineering, 2022, 44(8): 1136-1143. |
|