Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (12): 2200-2208.doi: 10.19562/j.chinasae.qcgc.2023.12.002
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
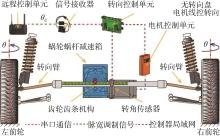
Lin He1,2( ),Ziang Xu1,2,Chunrong Huang1,2,Chao Gong1,Shuhua Li1,Qin Shi1
),Ziang Xu1,2,Chunrong Huang1,2,Chao Gong1,Shuhua Li1,Qin Shi1
Received:2023-05-23
Revised:2023-07-15
Online:2023-12-25
Published:2023-12-21
Contact:
Lin He
E-mail:helin@hfut.edu.cn
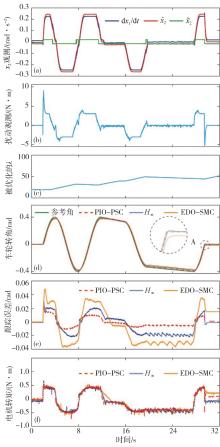
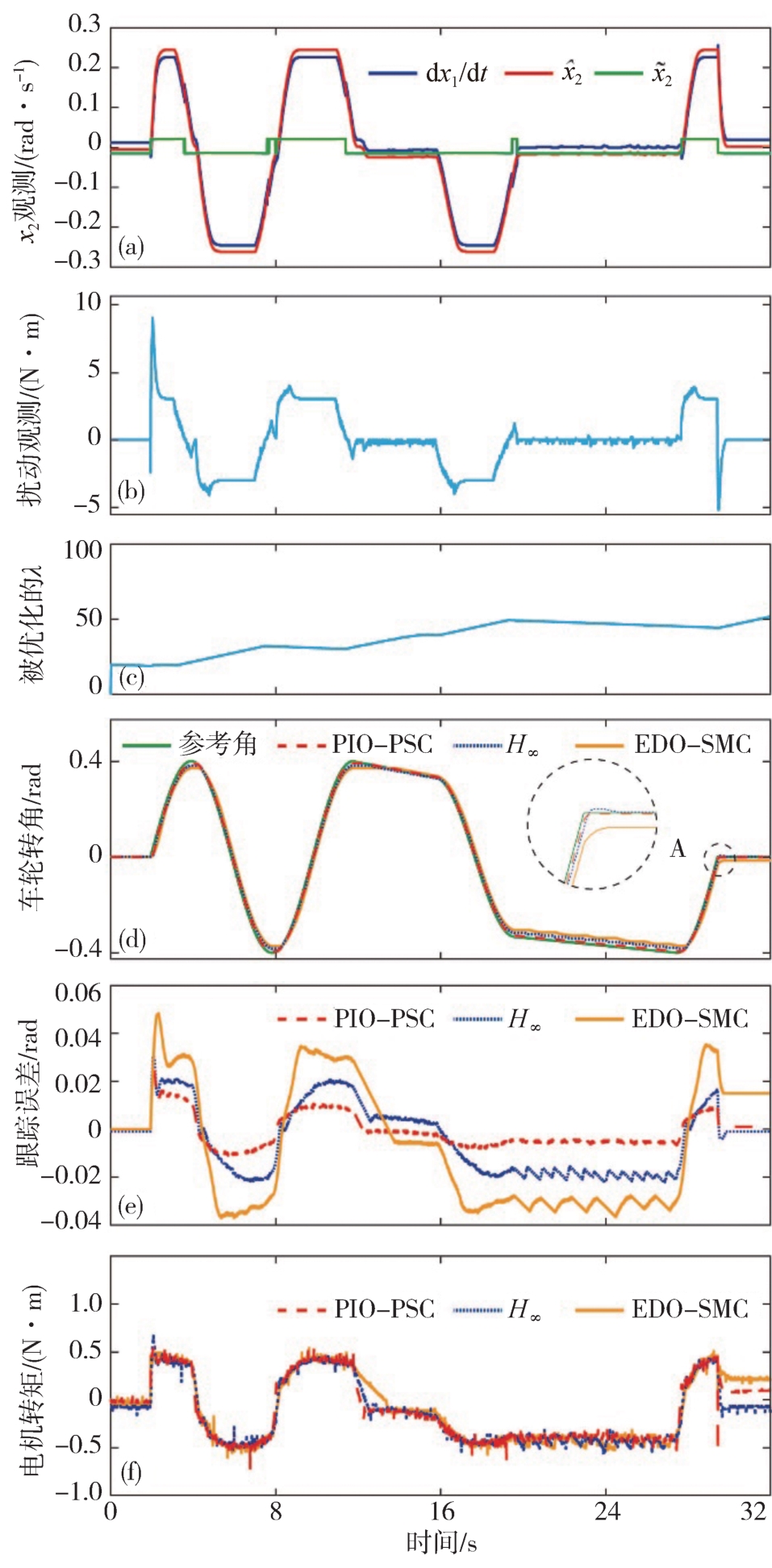
Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System[J].Automotive Engineering, 2023, 45(12): 2200-2208.
"
"
"

"

"
"
| 1 | WANG W, CHEN X, WANG J. Motor/generator applications in electrified vehicle chassis-a survey[J]. IEEE Transactions on Transportation Electrification, 2019, 5(3): 584-601. |
| 2 | SONG P, TOMIZUKA M, ZONG C. A novel integrated chassis controller for full drive-by-wire vehicles[J]. Vehicle System Dynamics, 2015, 53(2): 215-236. |
| 3 | 石琴, 刘鑫, 应贺烈,等. 电液线控制动系统压力反步控制算法研究[J]. 汽车工程, 2022, 44(5): 747-755. |
| SHI Q, LIU X, YING H, et al. Study on backstepping control algorithm for the hydraulic pressure in electro-hydraulic brake-by-wire system[J]. Automotive Engineering, 2022, 44(5): 747-755. | |
| 4 | HE L, LI F, GUO C, et al. An adaptive PI controller by particle swarm optimization for angle tracking of steer-by-wire[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3830-3840. |
| 5 | 赵万忠, 张寒, 邹松春,等. 线控转向系统控制技术综述[J]. 汽车安全与节能学报, 2021, 12(1): 18-34. |
| ZHAO W, ZHANG H, ZOU S, et al. Overview of vehicle steer-by-wire system control technologies[J]. Journal of Automotive Safety and Energy, 2021, 12(1): 18-34. | |
| 6 | 王云龙, 王泽政, 王永富,等. 带有干扰观测器的线控转向系统复合自适应神经网络控制[J]. 控制理论与应用, 2021, 38(4): 433-443. |
| WANG Y, WANG Z, WANG Y, et al. Composite adaptive neural network control for steer-by-wire systems with disturbance observer[J]. Control Theory & Applications, 2021, 38(4): 433-443. | |
| 7 | MA B, WANG Y, CHAI T. Event-triggered output feedback type-2 fuzzy control for uncertain steer-by-wire systems with prespecified tracking performance[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(8): 3098-3112. |
| 8 | ZOU S, ZHAO W, WANG C, et al. Tracking and synchronization control strategy of vehicle dual-motor steer-by-wire system via active disturbance rejection control[J]. IEEE/ASME Transactions on Mechatronics, 2023, 28(1): 92-103. |
| 9 | HUANG C, NAGHDY F, DU H. Delta operator-based fault estimation and fault-tolerant model predictive control for steer-by-wire systems[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1810-1817. |
| 10 | 罗建南, 朱光钰, 杨浩瀚,等. 线控转向系统的前轮转角跟踪策略研究[J]. 机械工程学报, 2019, 55(22): 165-173. |
| LUO J, ZHU G, YANG H, et al. Study on front wheel angle tracking strategy of steering-by-wire system[J]. Journal of Mechanical Engineering, 2019, 55(22): 165-173. | |
| 11 | HUANG C, NAGHDY F, DU H. Delta operator-based model predictive control with fault compensation for steer-by-wire systems[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(6): 2257-2272. |
| 12 | 李红娟, 王泽政, 王永富. 线控转向系统的自适应高阶滑模控制[J]. 控制与决策, 2021, 36(6): 1529-1536. |
| LI H, WANG Z, WANG Y. Adaptive higher-order sliding mode control for SBW system[J]. Control and Decision, 2021, 36(6): 1529-1536. | |
| 13 | SHI Q, XU Z, WEI Y, et al. Electric motor steer-by-wire angle tracking by proportional differential sliding mode controller with disturbance observer[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 1(1): 1-12. |
| 14 | 马瑞海, 王丽芳, 张俊智,等. 基于滑模自抗扰的电制动系统动态负载模拟[J]. 汽车工程, 2020, 42(2): 141-148. |
| MA R, WANG L, ZHANG J, et al. Sliding mode active disturbance rejection control for dynamic load emulation of the electric braking system[J]. Automotive Engineering, 2020, 42(2): 141-148. | |
| 15 | 秦武, 上官文斌, 吕辉. 非线性二自由度主动悬架滑模控制方法的研究[J]. 机械工程学报, 2020, 56(1): 58-68. |
| QIN W, SHANGGUAN W, LÜ H. Research on sliding mode control for nonlinear active suspension system with two degrees of freedom[J]. Journal of Mechanical Engineering, 2020, 56(1): 58-68. | |
| 16 | WANG H, KONG H, MAN Z, et al. Sliding mode control for steer-by-wire systems with AC motors in road vehicles[J]. IEEE Transactions on Industrial Electronics, 2014, 61(4): 1596-1611. |
| 17 | SUN Z, ZHENG J, MAN Z, et al. Robust control of a vehicle steer-by-wire system using adaptive sliding mode[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2251-2262. |
| 18 | WU X, ZHANG M, XU M. Active tracking control for steer-by-wire system with disturbance observer[J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5483-5493. |
| 19 | HUANG C, NAGHDY F, DU H. Sliding mode predictive tracking control for uncertain steer-by-wire system[J]. Control Engineering Practice, 2019, 85: 194-205. |
| 20 | HUANG C, NAGHDY F, DU H. Fault tolerant sliding mode predictive control for uncertain steer-by-wire system[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 261-272. |
| 21 | 陈辛波, 罗杰, 杭鹏,等. 某新型线控转向系统的自适应模糊滑模控制 [J]. 汽车工程, 2018, 40(5): 568-574. |
| CHEN X, LUO J, HANG P, et al. Adaptive fuzzy sliding mode control for a novel steering-by-wire system[J]. Automotive Engineering, 2018, 40(5): 568-574. | |
| 22 | MA B, WANG Y. Adaptive output feedback control of steer-by-wire systems with event-triggered communication[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(4): 1968-1979. |
| 23 | MA B, LUO G, WANG Y. Observer-based event-triggered control of steer-by-wire systems with prespecified tracking accuracy[J]. Mechanical Systems and Signal Processing, 2021, 161: 107857. |
| 24 | HE L, SHEN T, YU L, et al. A model-predictive-control-based torque demand control approach for parallel hybrid powertrains [J]. IEEE Transactions on Vehicular Technology, 2013, 62(3): 1041-1052. |
| 25 | CHEN W H, BALANCE D J, GAWTHROP P J. Optimal control of nonlinear systems: a predictive control approach[J]. Automatica, 2003, 39(4): 633-641. |
| 26 | SEPULCHRE R, JANKOVICM, KOKOTOVICPV. Constructive nonlinear control[M]. New York, NY, USA: Springer-Verlag, 1997. |
| 27 | SHIEH N C, TUNG P C, LIN C L. Robust output tracking control of a linear brushless DC motor with time-varying disturbances[J]. IEEE Proceedings-Electric Power Applications, 2002, 149(1): 39-45. |
| [1] | Bin Deng, Weihan Li, Di Wu, Bingzhan Zhang, Han Zhao. Integral Sliding Mode Control for Four-Wheel Active Steering Based on Kalman Filter Extended State Observer [J]. Automotive Engineering, 2024, 46(1): 100-108. |
| [2] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [3] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [4] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [7] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [8] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [9] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [10] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [11] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [12] | Yong Lu,Yichao He,He Tian,Kun Jiang,Diange Yang. Research on Longitudinal Acceleration Planning Method of Adaptive Cruise Control System for Mass Production [J]. Automotive Engineering, 2023, 45(10): 1803-1814. |
| [13] | Cheng Lin,Sheng Liang,Xinle Gong,Xiao Yu,Bowen Wang. Integrated Dynamic Control Strategy for Extreme Maneuvers of 4WIDEVs [J]. Automotive Engineering, 2022, 44(9): 1372-1385. |
| [14] | Shaobo Xie,Pengcheng Qu,Jiacheng Li,Huiqing Wang,Kun Lang. Study on Coordinated Control of Speed Planning and Energy Management for Connected Hybrid Electric Truck in Vehicle Following Scene [J]. Automotive Engineering, 2022, 44(8): 1136-1143. |
| [15] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |