Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (5): 719-734.doi: 10.19562/j.chinasae.qcgc.2023.05.002
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Yilin He1,Jian Ma1( ),Shukai Yang2,Wei Zheng1,Qifan Xue1
),Shukai Yang2,Wei Zheng1,Qifan Xue1
Received:2022-11-07
Revised:2022-12-05
Online:2023-05-25
Published:2023-05-26
Contact:
Jian Ma
E-mail:majian@chd.edu.cn
Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics[J].Automotive Engineering, 2023, 45(5): 719-734.
"
"


"
"

"

"
"
| 参数 | 数值 |
|---|---|
| 整备质量/kg | 1 250 |
| 轴距/m | 2.910 |
| 质心到前轴距离/m | 1.015 |
| 质心到后轴距离/m | 1.895 |
| 质心高度/m | 0.540 |
| 绕z轴转动惯量/(kg·m2) | 1 536.7 |
| 前轮侧偏刚度/(N·rad-1) | -76 000 |
| 后轮侧偏刚度/(N·rad-1) | -110 100 |
"

"


"

"
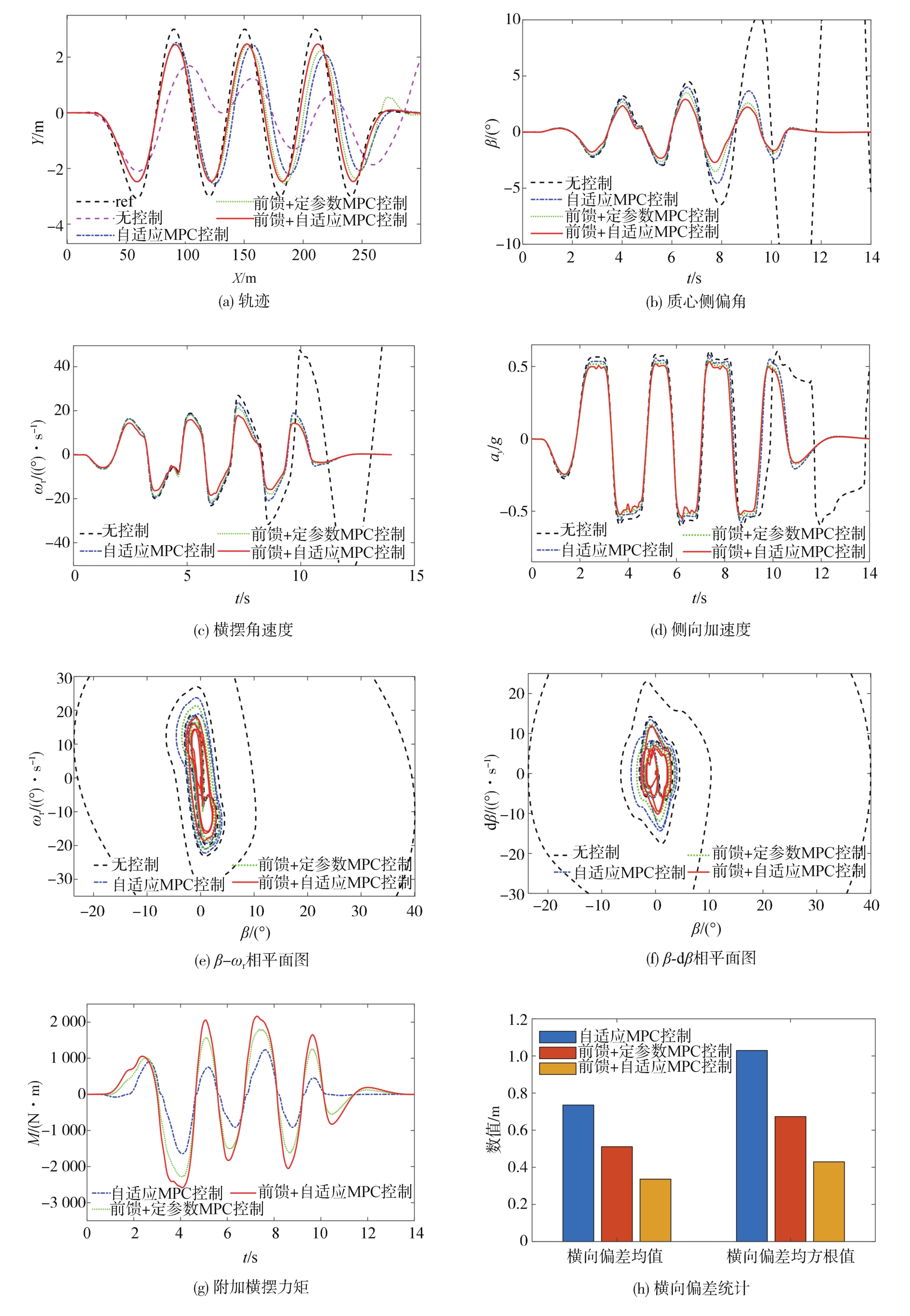
| 状态参数 | 项目 | 双移线工况:u=90 km/h,μ=0.6 | 双移线工况:u=120 km/h,μ=0.85 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 无控制 | 反馈 控制 | 前馈+定参数MPC | 前馈+自适应参数MPC | 无控制 | 反馈 控制 | 前馈+定参数MPC | 前馈+自适应参数MPC | ||
| 质心侧偏角 | 峰值 | 0.92° | 0.76° | 0.60° | 0.54° | 1.73° | 1.38° | 1.37° | 1.26° |
| 降低百分比 | 41.3% | 28.9% | 10.0% | 27.2% | 8.7% | 8.0% | |||
| 横摆角速度 | 峰值 | -11.75°/s | -10.33°/s | -9.84(°)/s | -9.64(°)/s | -12.94(°)/s | -12.34(°)/s | -11.76(°)/s | -10.75(°)/s |
| 降低百分比 | 18.0% | 6.7% | 2.0% | 16.9% | 12.9% | 8.6% | |||
| 侧向加速度 | 峰值 | -0.45g | -0.43g | -0.39g | -0.35g | -0.69g | -0.68g | -0.66g | -0.58g |
| 降低百分比 | 22.2% | 18.6% | 10.3% | 15.9% | 14.7% | 12.1% | |||
"

"

"
"
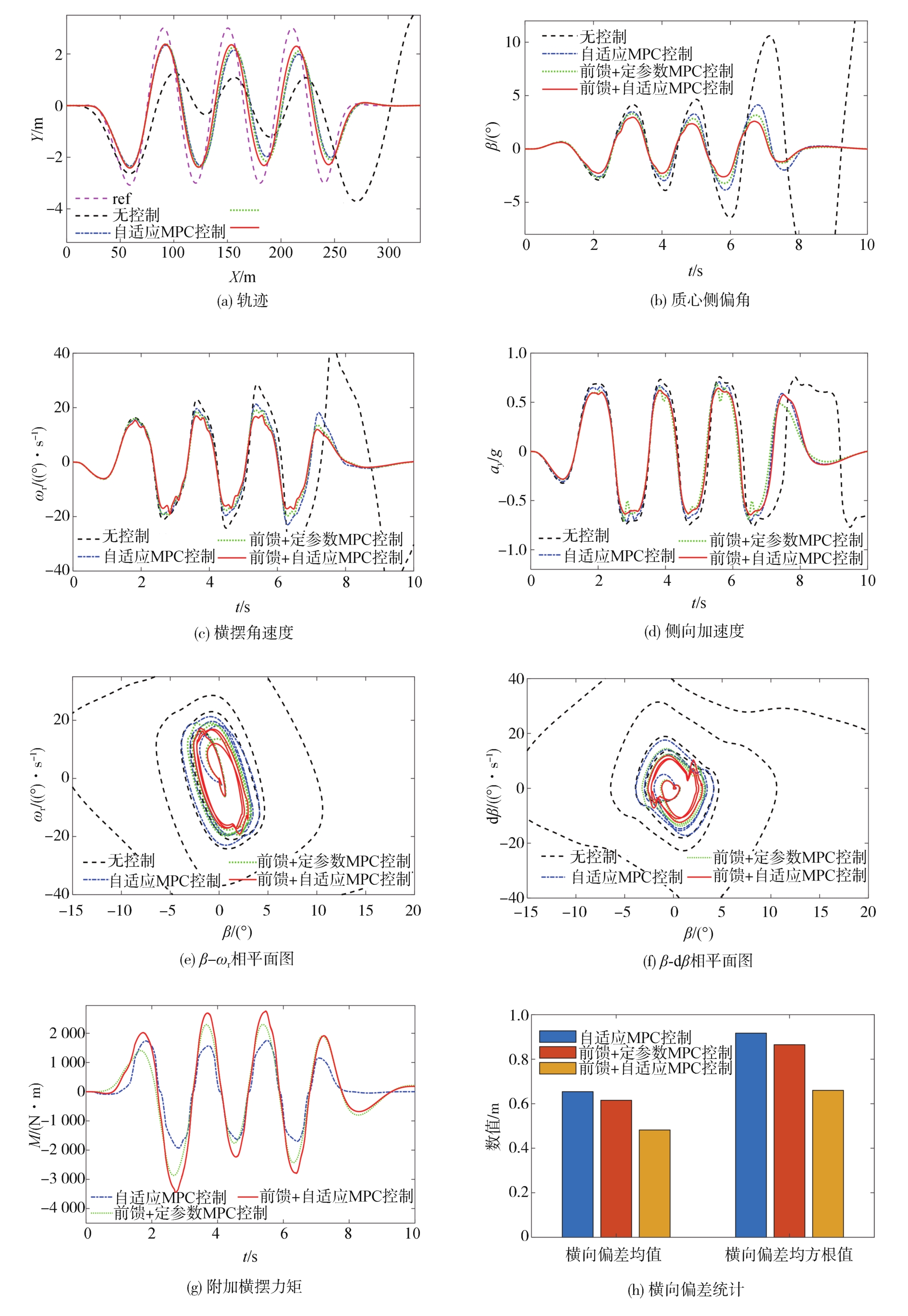
| 状态参数 | 项目 | 蛇行工况:90 km/h,μ=0.6 | 蛇行工况:120 km/h,μ=0.85 | ||||
|---|---|---|---|---|---|---|---|
| 反馈控制 | 前馈+定参数MPC | 前馈+自适应 参数MPC | 反馈控制 | 前馈+定参数MPC | 前馈+自适应 参数MPC | ||
| 质心侧偏角 | 峰值 | -4.57° | -3.51° | -2.29° | -4.13° | -3.22° | -2.62° |
| 降低百分比 | 49.8% | 34.8% | 36.6% | 18.6% | |||
| 横摆角速度 | 峰值 | 23.66(°)/s | 21.19(°)/s | 18.50(°)/s | -20.95(°)/s | -19.69(°)/s | -17.24(°)/s |
| 降低百分比 | 21.8% | 12.7% | 17.7% | 12.4% | |||
| 侧向加速度 | 峰值 | 0.58g | 0.55g | 0.53g | -0.70g | -0.69g | -0.65g |
| 降低百分比 | 8.6% | 3.6% | 7.1% | 5.8% | |||
| 1 | 梁旺,秦兆博,陈亮,等.基于改进BP神经网络的智能车纵向控制方法[J].汽车工程,2022,44(8):1162-1172. |
| LIANG W, QIN Z B, CHEN L, et al. Longitudinal control method of intelligent vehicles based on the improved BP neural network[J]. Automotive Engineering, 2022,44(8):1162-1172. | |
| 2 | LENG Z, MINOR M A. Curvature-based ground vehicle control of trailer path following considering sideslip and limited steering actuation[J]. IEEE Transactions on Intelligent Transportation Systems, 2017,18(2):332-348. |
| 3 | 陈龙, 解云鹏, 蔡英凤,等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程, 2020, 42(8):1016-1026. |
| CHEN L, XIE Y P, CAI Y F, et al. Stable tracking control of autonomous vehicles at extreme conditions[J]. Automotive Engineering, 2020, 42(8): 1016-1026. | |
| 4 | CHENG Z, LU Z. Research on the PID control of the ESP system of tractor based on improved AFSA and improved SA[J]. Computers and Electronics in Agriculture, 2018, 148:142-147. |
| 5 | 安伟彪. 分布式驱动电动汽车轨迹跟踪与稳定性集成控制研究[D]. 桂林: 桂林电子科技大学,2021. |
| AN W B. Research on trajectory tracking and stability integrated control of distributed drive electric vehicle[D]. Guilin: Guilin University of Electronic Technology, 2021. | |
| 6 | 夏万林. 智能分布式驱动电动汽车动力学控制方法研究[D].重庆: 重庆理工大学,2018. |
| XIA W L. Research on dynamics control method of intelligent distributed drive electric vehicle[D]. Chongqing: Chongqing University of Technology, 2018. | |
| 7 | LING L, LU Y, WANG R, et al. A three-dimensional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC[J]. Industrial Electronics, IEEE Transactions on, 2017, 64(4):3389-3401. |
| 8 | 陈特,陈龙,徐兴,等.分布式驱动无人车路径跟踪与稳定性协调控制[J].汽车工程,2019,41(10):1109-1116. |
| CHEN T, CHEN L, XU X, et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019,41(10):1109-1116. | |
| 9 | GUO J, LUO Y, LI K, et al. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation[J]. Mechanical Systems and Signal Processing, 2018, 105(15):183-199. |
| 10 | 丁代林. 无人驾驶车辆轨迹跟踪控制及其稳定性研究[D]. 重庆: 重庆理工大学,2022. |
| DING D L. Research on trajectory tracking control and stability of unmanned vehicle[D]. Chongqing: Chongqing University of Technology, 2022. | |
| 11 | GASMI A, BOUDALI M T, ORJUELA R, et al. Multi-criteria stability combination for yaw stability control of autonomous vehicles-ScienceDirect[J]. IFAC-Papers On Line, 2019, 52(5):465-470. |
| 12 | 金辉,李世杰.基于极限车速的车辆稳定性控制研究[J].汽车工程,2018,40(1):48-56. |
| JIN H, LI S J. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018,40(1):48-56. | |
| 13 | 贺伊琳,马建,赵轩,等.基于小波控制的电动汽车稳定性研究[J].中国公路学报,2018,31(11):214-226. |
| HE Y L, MA J, ZHAO X, et al. Research on wavelet control based stability of the electric vehicle[J]. China Journal of Highway and Transport, 2018,31(11):214-226. | |
| 14 | WANG Z, WANG Y, ZHANG L, et al. Vehicle stability enhancement through hierarchical control for a four-wheel-independently-actuated electric vehicle[J]. Energies, 2017,10(7): 947-964. |
| 15 | NOVELLIS L D, SORNIOTTO A, GRUBER P, et al. Direct yaw moment control actuated through electric drivetrains and friction brakes: theoretical design and experimental assessment[J]. Mechatronics, 2015,26:1-15. |
| 16 | ZHANG L, CHEN H, HUANG Y, et al. Model predictive control for integrated longitudinal and lateral stability of electric vehicles with in-wheel motors[J]. IET Control Theory and Applications, 2020, 14(18):2741-2751. |
| 17 | SHUAI Z B, ZHANG H, WANG J M, et al. Combined AFS and DYC control of four-wheel-independent-drive electric vehicles over CAN network with time-varying delays[J]. IEEE Transactions on Vehicular Technology, 2014,63(2): 591–602. |
| 18 | JIN X J, YU Z T, YIN G D, et al. Improving vehicle handling stability based on combined AFS and DYC system via robust takagi-sugeno fuzzy control[J]. IEEE Transactions on Intelligent Transportation Systems, 2018,19(8): 2696–2707. |
| 19 | YOUSSFI N E, BACHTIRI R E, CHAIBI R, et al. Static output-feedback H ∞ control for T-S fuzzy vehicle lateral dynamics[J]. SN Applied Science, 2020, 2(1),101. |
| 20 | JALALI M, KHORSRAVANI S, KHAJEPOUR A, et al. Model predictive control of vehicle stability using coordinated active steering and differential brakes[J]. Mechatronics, 2017, 48:30-41. |
| 21 | REN B, HONG C, ZHAO H, et al. MPC-based yaw stability control in in-wheel-motored EV via active front steering and motor torque distribution[J]. Mechatronics, 2016, 38:103-114. |
| 22 | ZHANG L, DING H, GUO K, et al. Cooperative chassis control system of electric vehicles for agility and stability improvements[J]. IET Intelligent Transport Systems, 2019,13:134-140. |
| 23 | SHI K, YUAN X F, HUANG G M, et al. MPC-based compensation control system for the yaw stability of distributed drive electric vehicle[J]. International Journal of Systems Science: The Theory and Practice of Mathematical Modelling, Simulation, Optimization and Control in Relation to Biological, Economic, Industrial and Transportation Systems, 2018,49(8):1795-1808. |
| 24 | HU J Y, LI J Q, LI H. Feedforward and feedback integrated control for handling characteristics adjustment of multi-axle heavy-duty vehicles using independent-drive electric wheels[C]. 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), 2021. |
| 25 | 刁勤晴, 张雅妮, 朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J]. 中国机械工程, 2019, 30(12):8. |
| DIAO Q Q, ZHANG Y N, ZHU L Y. A lateral and longitudinal fuzzy control of intelligent vehicles with double preview points for large curvature roads[J]. China Mechanical Engineering, 2019, 30(12):8. | |
| 26 | HOU R, ZHAI L, SUN T, et al. Steering stability control of a four in-wheel motor drive electric vehicle on a road with varying adhesion coefficient[J]. IEEE Access, 2019:32617-32627. |
| 27 | 汪若尘, 魏振东,叶青, 等.视觉预瞄式智能车辆纵横向协同控制研究[J].汽车工程,2019,41(8):763-770,830. |
| WANG R C,WEI Z D,YE Q, et al. A research on visual preview longitudinal and lateral cooperative control of intelligent vehicle[J]. Automotive Engineering, 2019,41(8):763-770,830. | |
| 28 | 黄鹤. 汽车稳定性控制系统分层优化控制研究[D]. 合肥: 合肥工业大学,2012. |
| HUANG H. Study of electronic stability control based on layered optimization[D]. Hefei: Hefei University of Technology, 2012. | |
| 29 | CHEN B C, TSAI C T, LEE K. Path-following steering controller of automated lane change system with adaptive preview time[C]. IEEE International Conference on Systems.IEEE,2016. |
| 30 | 陈力, 殷时蓉, 罗天洪, 等. 基于BP神经网络的智能车辆换道决策模型研究[J].汽车工程学报,2022,12(1):83-89. |
| CHEN L,YIN S R,LUO T H, et al. Research on lane-changing decision model for intelligent vehicles based on BP neural network[J]. Chinese Journal of Automotive Engineering, 2022,12(1):83-89. |
| [1] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [2] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [5] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [6] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [7] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [8] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [9] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [10] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [11] | Yong Lu,Yichao He,He Tian,Kun Jiang,Diange Yang. Research on Longitudinal Acceleration Planning Method of Adaptive Cruise Control System for Mass Production [J]. Automotive Engineering, 2023, 45(10): 1803-1814. |
| [12] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
| [13] | Cheng Lin,Sheng Liang,Xinle Gong,Xiao Yu,Bowen Wang. Integrated Dynamic Control Strategy for Extreme Maneuvers of 4WIDEVs [J]. Automotive Engineering, 2022, 44(9): 1372-1385. |
| [14] | Shaobo Xie,Pengcheng Qu,Jiacheng Li,Huiqing Wang,Kun Lang. Study on Coordinated Control of Speed Planning and Energy Management for Connected Hybrid Electric Truck in Vehicle Following Scene [J]. Automotive Engineering, 2022, 44(8): 1136-1143. |
| [15] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |