Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (8): 1362-1372.doi: 10.19562/j.chinasae.qcgc.2023.08.007
Special Issue: 智能网联汽车技术专题-规划&决策2023年
Previous Articles Next Articles
Ming Wang,Xiaolin Tang( ),Kai Yang,Guofa Li,Xiaosong Hu
),Kai Yang,Guofa Li,Xiaosong Hu
Received:2023-03-19
Revised:2023-05-20
Online:2023-08-25
Published:2023-08-17
Contact:
Xiaolin Tang
E-mail:tangxl0923@cqu.edu.cn
Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk[J].Automotive Engineering, 2023, 45(8): 1362-1372.

"

"
| 输入: |
|---|
1: 使用任意权重参数 2: for 对于每一个预测网络 3: 随机打乱数据集 4: 随机更改训练随机数种子; 5: for 训练过程中的某一次迭代 6: 7: 损失值反向传播获得 8: 根据梯度 9: end 10: 获得训练好的GNN预测网络 11: end 12: 获得M个同构异参的GNN预测网络; 13: 最终预测结果: 14: 不确定性风险:∑t |
| 输出:某时刻预测结果 |
"
"
| 参数 | 数值 |
|---|---|
| 前轴轴距 | 1.81 m |
| 后轴轴距 | 1.33 m |
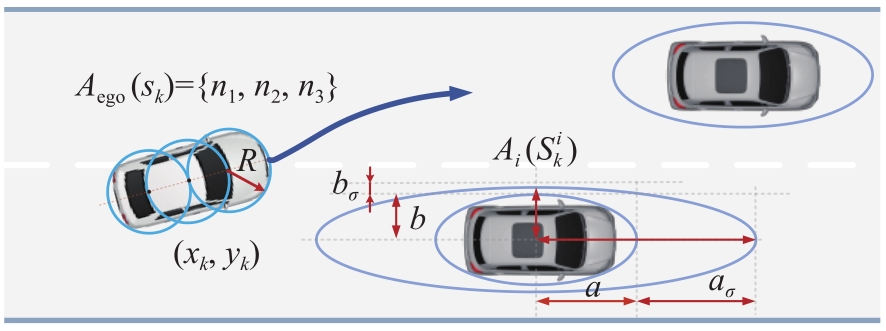
| 自车包络圆个数 | 3 |
| 包络圆半径 | 1.0 m |
| 最大车速 | 33 m/s |
| 最大加速度 | 2.8 m/s2 |
| 最大减速度 | -8 m/s2 |
| 最大转向角 | |
| 道路左、右边界 |
"
"
| 参数 | 数值 |
|---|---|
| 预测时域 | 3 s |
| 控制时域 | 3 s |
| 控制频率 | 10 Hz |
| 轮廓误差权重 | 500 |
| 滞后误差权重 | 150 |
| 加速度权重 | 6 |
| 转向角权重 | 150 |
| 速度权重 | 2.5 |
| 松弛变量权重 | 2 800 |
| 参考线投影速度权重 | 0.01 |
"
| 集成数量M | ADE@3 s/m | FDE@3 s/m |
|---|---|---|
| 1(基础模型) | 0.278 | 0.713 |
| 2 | 0.277 | 0.710 |
| 4 | 0.264 | 0.694 |
| 6 | 0.263 | 0.692 |

"


"


"
"

"


"
"
"

"
"

"

"
"
"
| 1 | YANG K, HUANG Y, QIN Y, et al. Potential and challenges to improve vehicle energy efficiency via V2X: literature review[J]. International Journal of Vehicle Performance, 2021, 7(3-4): 244-265. |
| 2 | TANG X, YANG K, WANG H, et al. Driving environment uncertainty-aware motion planning for autonomous vehicles[J]. Chinese Journal of Mechanical Engineering, 2022, 35(1): 120. |
| 3 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highd dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018: 2118-2125. |
| 4 | ZHAN W, SUN L, WANG D, et al. Interaction dataset: an international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[J]. arXiv preprint arXiv:, 2019. |
| 5 | TANG X, YANG K, WANG H, et al. Prediction-uncertainty-aware decision-making for autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(4): 849-862. |
| 6 | DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 2018: 1468-1476. |
| 7 | MO X, XING Y, LV C. Graph and recurrent neural network-based vehicle trajectory prediction for highway driving[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). IEEE, 2021: 1934-1939. |
| 8 | MO X, HUANG Z, XING Y, et al. Multi-agent trajectory prediction with heterogeneous edge-enhanced graph attention network[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9554-9567. |
| 9 | 杨澜, 绳贺, 赵祥模,等. 信号交叉口自动驾驶左转车辆类人化全局运动轨迹规划[J]. 中国公路学报, 2022, 35(9):14. |
| YANG L,SHENG H,ZHAO X M,et al. Humanoid motion planning strategy for left-turn maneuvers of automated vehicles at signalized intersection[J]. China Journal of Highway and Transport, 2022, 35(9):14. | |
| 10 | BRITO B, AGARWAL A, ALONSO-MORA J. Learning interaction-aware guidance for trajectory optimization in dense traffic scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18808-18821. |
| 11 | 李文礼,韩迪,任勇鹏,等.基于交互车辆轨迹预测的自动驾驶车辆轨迹规划[J].计算机应用研究,2023,40(2):519-525,538. |
| LI W L,HAN D,REN Y P, et al. Trajectory planning of autonomous vehicle based on interactive vehicle trajectory prediction[J]. Application Research of Computers, 2023,40(2):519-525,538. | |
| 12 | WANG H, LU B, LI J, et al. Risk assessment and mitigation in local path planning for autonomous vehicles with LSTM based predictive model[J]. IEEE Transactions on Automation Science and Engineering, 2021, 19(4): 2738-2749. |
| 13 | LIU K, LI N, TSENG H E, et al. Interaction-aware trajectory prediction and planning for autonomous vehicles in forced merge scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2022. |
| 14 | VELIČKOVIĆ P, CUCURULL G, CASANOVA A, et al. Graph attention networks[J]. arXiv preprint arXiv:, 2017. |
| 15 | LAKSHMINARAYANAN B, PRITZEL A, BLUNDELL C. Simple and scalable predictive uncertainty estimation using deep ensembles[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 16 | KONG J, PFEIFFER M, SCHILDBACH G, et al. Kinematic and dynamic vehicle models for autonomous driving control design[C]. 2015 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015: 1094-1099. |
| 17 | SCHWARTING W, ALONSO-MORA J, PAULI L, et al. Parallel autonomy in automated vehicles: safe motion generation with minimal intervention[C]. 2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017: 1928-1935. |
| 18 | BAE S, SAXENA D, NAKHAEI A, et al. Cooperation-aware lane change maneuver in dense traffic based on model predictive control with recurrent neural network[C]. 2020 American Control Conference (ACC). IEEE, 2020: 1209-1216. |
| 19 | ZANELLI A, DOMAHIDI A, JEREZ J, et al. FORCES NLP: an efficient implementation of interior-point methods for multistage nonlinear nonconvex programs[J]. International Journal of Control, 2020, 93(1): 13-29. |
| 20 | SHALEV-SHWARTZ S, SHAMMAH S, SHASHUA A. On a formal model of safe and scalable self-driving cars[J]. arXiv preprint arXiv:, 2017. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [3] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [4] | Weiguo Liu,Zhiyu Xiang,Rui Liu,Guodong Li,Zixu Wang. Research on End-to-End Vehicle Motion Planning Method Based on Deep Learning [J]. Automotive Engineering, 2023, 45(8): 1343-1352. |
| [5] | Wei Ran,Hui Chen,Jiaxin Yang,Nishimura Yosuke,Chaopeng Guo,Youyu Yin. Design Method of Motion Planning Reward Function Based on Utility Theory [J]. Automotive Engineering, 2023, 45(8): 1373-1382. |
| [6] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [7] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [8] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [9] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [10] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [11] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [12] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [13] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [14] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [15] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |