Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (7): 1112-1122.doi: 10.19562/j.chinasae.qcgc.2023.07.002
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2023年
Previous Articles Next Articles
Dongyu Zhao,Shuen Zhao( )
)
Received:2022-12-14
Revised:2023-01-24
Online:2023-07-25
Published:2023-07-25
Contact:
Shuen Zhao
E-mail:zse0916@163.com
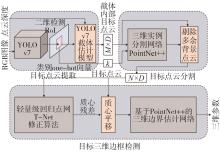
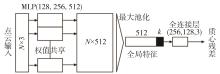
Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7[J].Automotive Engineering, 2023, 45(7): 1112-1122.

"


"

"
"
"

"

"

"

"

"

"
"
| 算法 | 图像 | 点云 | 鸟瞰图 | 耗时/(ms·帧-1) | 检测精度AP/% 车辆 IoU≥0.7 行人/骑车人 IoU≥0.5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 车辆 | 行人 | 骑车人 | |||||||||||
| 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | |||||
| PointGNN[ | ? | 500 | 87.89 | 78.34 | 77.38 | ||||||||
| Voxelnet[ | ? | 33 | 81.97 | 65.46 | 62.85 | 57.86 | 53.42 | 48.87 | 67.17 | 47.65 | 45.11 | ||
| SECOND[ | ? | 40 | 83.13 | 73.26 | 66.20 | 51.07 | 42.56 | 37.29 | 70.51 | 53.85 | 46.90 | ||
| F-PointNet v1 | ? | ? | 66 | 84.33 | 71.38 | 63.43 | 65.83 | 56.16 | 49.61 | 74.22 | 55.99 | 52.61 | |
| F-PointNet v2 | ? | ? | 131 | 85.76 | 71.92 | 63.65 | 70.00 | 61.32 | 53.59 | 77.15 | 56.49 | 53.37 | |
| MV3D[ | ? | ? | 302 | 71.29 | 62.68 | 56.56 | |||||||
| 文献[ | ? | ? | 102 | 83.38 | 74.65 | 63.44 | |||||||
| 文献[ | ? | 45 | 90.29 | 84.61 | 80.34 | ||||||||
| 文献[ | ? | ? | 203 | 82.95 | 67.48 | 64.22 | 58.90 | 55.33 | 50.16 | 68.42 | 48.53 | 46.08 | |
| 文献[ | ? | ? | 93 | 88.27 | 78.53 | 77.75 | |||||||
| 级联模型 | ? | ? | 91 | 92.08 | 84.70 | 81.32 | 76.67 | 69.08 | 60.92 | 76.68 | 62.27 | 57.82 | |
"
| 算法 | 点云分割 网络 | 目标 | 检测精度AP/% | 耗时/ (ms·帧-1) | ||
|---|---|---|---|---|---|---|
| 简单 | 中等 | 困难 | ||||
级联 模型 | PointNet | 车辆(IoU≥0.7) | 88.21 | 83.60 | 72.58 | 46 |
| 行人(IoU≥0.5) | 74.42 | 67.91 | 58.66 | |||
| 骑车人(IoU≥0.5) | 75.23 | 60.06 | 55.34 | |||
级联 模型 | PointNet++ | 车辆(IoU≥0.7) | 92.08 | 84.70 | 81.32 | 91 |
| 行人(IoU≥0.5) | 76.67 | 69.08 | 60.92 | |||
| 骑车人(IoU≥0.5) | 76.68 | 62.27 | 57.82 | |||
"
| 算法结构 | 目标 | 检测精度AP/% | ||
|---|---|---|---|---|
| 简单 | 中等 | 困难 | ||
不引入 T-Net | 车辆(IoU≥0.7) | 90.12 | 82.12 | 78.91 |
| 行人(IoU≥0.5) | 74.22 | 67.34 | 58.66 | |
| 骑车人(IoU≥0.5) | 75.02 | 60.53 | 55.30 | |
引入 T-Net | 车辆(IoU≥0.7) | 92.08 | 84.70 | 81.32 |
| 行人(IoU≥0.5) | 76.67 | 69.08 | 60.92 | |
| 骑车人(IoU≥0.5) | 76.68 | 62.27 | 57.82 | |
"
| 网络结构 | 分割精度 mAP/% | 检测精度 mAP/% | 分割耗时/(ms·帧-1) | 总耗时/(ms·帧-1) |
|---|---|---|---|---|
| YOLOv5&PointNet++ | 56.82 | 71.71 | 80 | 184 |
| DETR[ | 52.65 | 66.93 | 86 | 408 |
| ConvNeXts[ | 58.93 | 72.68 | 83 | 493 |
| YOLOv7&PointNet++ | 59.35 | 73.51 | 78 | 91 |
"
| 指标 | 算法 | 车辆IoU≥0.7 | 行人IoU≥0.5 | 骑车人IoU≥0.5 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | ||
| BEV检测精度AP/% | Voxelnet | 89.60 | 84.81 | 78.57 | 65.95 | 61.05 | 56.98 | 74.41 | 52.18 | 50.49 |
| MV3D | 86.55 | 78.10 | 76.67 | |||||||
| SECOND | 89.96 | 87.07 | 79.66 | |||||||
| PointGNN | 89.82 | 88.31 | 87.16 | |||||||
| PointPillars[ | 90.07 | 86.56 | 82.81 | 59.78 | 52.38 | 50.12 | 79.90 | 62.73 | 55.58 | |
| F-PointNe v2 | 88.16 | 84.02 | 76.44 | 72.38 | 66.39 | 59.57 | 81.82 | 60.03 | 56.32 | |
| 级联模型 | 96.22 | 89.75 | 86.81 | 83.22 | 73.87 | 65.49 | 83.19 | 64.41 | 59.81 | |
| 平均航向相似度AOS/% | 3DOP[ | 91.58 | 86.80 | 76.80 | 61.57 | 54.79 | 51.12 | 73.94 | 55.59 | 53.00 |
| Mono3D[ | 91.90 | 86.28 | 77.09 | 62.20 | 55.77 | 51.78 | 71.95 | 53.10 | 51.32 | |
| 文献[ | 87.21 | 81.47 | 74.64 | |||||||
| 级联模型 | 92.21 | 86.24 | 77.28 | 56.35 | 54.85 | 50.60 | 73.24 | 56.84 | 55.58 | |
| 1 | LI B, OUYANG W, SHENG L, et al. Gs3D: an efficient 3D object detection framework for autonomous driving[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2019: 1019-1028. |
| 2 | GIRSHICK R. Fast R-CNN[C]. Proceedings of the IEEE International Conference on Computer Vision. IEEE, 2015: 1440-1448. |
| 3 | LI P, CHEN X, SHEN S. Stereo R-CNN based 3D object detection for autonomous driving[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2019: 7644-7652. |
| 4 | HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]. Proceedings of the IEEE International Conference on Computer Vision. IEEE, 2017: 2961-2969. |
| 5 | BEWLEY A, SUN P, MENSINK T, et al. Range conditioned dilated convolutions for scale invariant 3D object detection[J]. arXiv preprint arXiv: , 2020. |
| 6 | 李悄, 李垚辰, 张玉龙, 等. 采用稀疏3D卷积的单阶段点云三维目标检测方法[J]. 西安交通大学学报, 2022, 56(9): 112-122. |
| LI Q, LI Y C, ZHANG Y L, et al. A single-stage point cloud 3D object detection method using sparse 3D convolution[J]. Journal of Xi’an Jiaotong University, 2022, 56(9): 112-122. | |
| 7 | CAESAR H, BANKITI V, LANG A H, et al. Nuscenes: a multimodal dataset for autonomous driving[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2020: 11621-11631. |
| 8 | HU J S K, KUAI T, WASLANDER S L. Point density-aware voxels for lidar 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2022: 8469-8478. |
| 9 | 张名芳, 吴禹峰, 王力,等. 基于金字塔特征融合的二阶段三维点云车辆检测[J]. 交通运输系统工程与信息, 2022, 22(5): 107-116. |
| ZHANG M F, WU Y F, WANG L, et al. Pyramid-feature-fusion-based two stage vehicle detection via 3D point cloud[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(5): 107-116. | |
| 10 | SHI S, WANG X, LI H. PointRCNN: 3D object proposal generation and detection from point cloud[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2019: 770-779. |
| 11 | QI C R, SU H, MO K, et al. Pointnet: deep learning on point sets for 3D classification and segmentation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2017: 652-660. |
| 12 | QI C R, YI L, SU H, et al. Pointnet++: deep hierarchical feature learning on point sets in a metric space[J]. arXiv preprint arXiv: , 2017. |
| 13 | YANG Z, SUN Y, LIU S, et al. 3DSSD: point-based 3D single stage object detector[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2020: 11040-11048. |
| 14 | 谢德胜, 徐友春, 陆峰, 等. 基于多传感器信息融合的3维目标实时检测[J]. 汽车工程, 2022, 44(3): 340-349. |
| XIE D X, XU Y C, LU F, et al. Real-time detection of 3D objects based on multi-sensor information fusion[J]. Automotive Engineering, 2022, 44(3): 340-349. | |
| 15 | WU X, PENG L, YANG H, et al. Sparse fuse dense: towards high quality 3D detection with depth completion[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2022: 5418-5427. |
| 16 | 徐晨, 倪蓉蓉, 赵耀. 融合稀疏点云补全的3D目标检测算法[J]. 图学学报, 2021, 42(1): 37-43. |
| XU C, NI R R, ZHAO Y. 3D object detection algorithm combined with sparse point cloud completion[J]. Journal of Graphics, 2021, 42(1): 37-43. | |
| 17 | QI C R, LIU W, WU C, et al. Frustum pointnets for 3D object detection from rgb-d data[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2018: 918-927. |
| 18 | 张旭豪. 面向动车场景的三维目标检测[D]. 成都: 电子科技大学, 2022. |
| ZHANG X H. 3D object detection in electric multiple units scene[D]. Chengdu: University of Electronic Science and Technology of China, 2022. | |
| 19 | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[J]. arXiv preprint arXiv: , 2022. |
| 20 | SHI W, RAJKUMAR R. Point-GNN: graph neural network for 3D object detection in a point cloud[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 1711-1719. |
| 21 | ZHOU Y, TUZEL O. VoxelNet: end-to-end learning for point cloud based 3D object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2018: 4490-4499. |
| 22 | CHEN X, MA H, WAN J, et al. Multi-view 3D object detection network for autonomous driving[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2017: 1907-1915. |
| 23 | 刘通, 高思洁, 聂为之. 基于多模态信息融合的多目标检测算法[J]. 激光与光电子学进展, 2022, 59(8): 339-348. |
| LIU T, GAO S J, NIE W Z. Multitarget detection algorithm based on multimodal information fusion[J]. Laser and Optoelectronics Progress, 2022, 59(8): 339-348. | |
| 24 | XIE L, XIANG C, YU Z X, et al. PI-RCNN: an efficient multi-sensor 3D object detector with point-based attentive cont-conv fusion module[J]. Proceedings of the AAAI Conference on Artificial Intelligence, AAAI, 2020, 34(7): 12460-12467. |
| 25 | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[C]. European Conference on Computer Vision. Springer. Cham, 2020: 213-229. |
| 26 | LIU Z, MAO H Z, WU C Y, et al. A ConvNet for the 2020s[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2022: 11976-11986. |
| 27 | LANG A H, VORA S, CAESAR H, et al. PointPillars: fast encoders for object detection from point clouds[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. IEEE, 2019: 12697-12705. |
| 28 | CHEN X, KUNDU K, ZHU Y, et al. 3D object proposals for accurate object class detection[C]. International Conference on Neural Information Processing Systems. MIT Press, 2015. |
| 29 | CHEN X, KUNDU K, ZHANG Z, et al. Monocular 3D object detection for autonomous driving[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2016: 2147-2156. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [3] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [4] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [5] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [6] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [7] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [8] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [9] | Xiaojun Zhang,Jingzhe Xi,Yanlei Shi,Anlu Yuan. Lightweight YOLOv7-R Algorithm for Road-Side View Target Detection [J]. Automotive Engineering, 2023, 45(10): 1833-1844. |
| [10] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
| [11] | Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid [J]. Automotive Engineering, 2022, 44(8): 1173-1182. |
| [12] | Zhenhai Gao,Xiangtong Yan,Fei Gao. A Decision-making Method for Longitudinal Autonomous Driving Based on Inverse Reinforcement Learning [J]. Automotive Engineering, 2022, 44(7): 969-975. |
| [13] | Dafang Wang,Jingdong Du,Jiang Cao,Mei Zhang,Gang Zhao. Research on Style Transfer Network for Autonomous Driving Data Generation [J]. Automotive Engineering, 2022, 44(5): 684-690. |
| [14] | Jie Hu,Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu. Parallel Parking Trajectory Planning for Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(3): 330-339. |
| [15] | Jinghua Guo,Zhifei He,Yugong Luo,Keqiang Li. Vehicle Cut-in Trajectory Prediction Based on Deep Learning in a Human-machine Mixed Driving Environment [J]. Automotive Engineering, 2022, 44(2): 153-160. |
|