Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (1): 20-31.doi: 10.19562/j.chinasae.qcgc.2023.01.003
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Pulei Xu1,Yingfeng Cai1( ),Yubo Lian2,Xiaoqiang Sun1,Hai Wang3,Long Chen1,Yilin Zhong2
),Yubo Lian2,Xiaoqiang Sun1,Hai Wang3,Long Chen1,Yilin Zhong2
Received:2022-07-31
Revised:2022-08-23
Online:2023-01-25
Published:2023-01-18
Contact:
Yingfeng Cai
E-mail:caicaixiao0304@126.com
Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory[J].Automotive Engineering, 2023, 45(1): 20-31.
"
"
"
"
"
"
"

"
"
| 参数 | 数值(单位) | 参数 | 数值(单位) |
|---|---|---|---|
"
"
"
"
"
"
"

"
"
"
"
| 方法 | 纵向车速 全时段误差 | 方法 | 横摆角速度 全时段误差 |
|---|---|---|---|
| 改进分层可拓 | 改进分层可拓 | ||
| 分层可拓 | 分层可拓 | ||
| 普通可拓 | 普通可拓 |
"
"
"
"
"
"
"
"
"
| 方法 | 纵向车速 全时段误差 | 方法 | 横摆角速度 全时段误差 |
|---|---|---|---|
| 改进分层可拓 | 改进分层可拓 | ||
| 分层可拓 | 分层可拓 | ||
| 普通可拓 | 普通可拓 |
| 1 | TERMOUS H, SHRAIM H, TALJ R, et al. Coordinated control strategies for active steering, differential braking and active suspension for vehicle stability, handling and safety improvement[J]. Vehicle System Dynamics, 2018, 57: 1-36. |
| 2 | 赵树恩, 胡洪银, 景东印. AFS/DYC协调控制的分布式驱动电动汽车稳定性控制[J]. 华侨大学学报: 自然科学版, 2021, 42(5): 571-579. |
| ZHAO S E, HU H Y, JING D Y. Stability control of distributed driven electric vehicles controlled by AFS/DYC coordination[J]. Journal of Huaqiao University: Natural Science Edition, 2021, 42(5): 571-579. | |
| 3 | 田杰, 高翔, 陈宁. 基于AFS和DYC协调控制的车辆稳定性研究[J]. 机械设计, 2010, 27(10): 18-21. |
| TIAN J, GAO X, CHEN N. Research on vehicle stability based on coordinated control of AFS and DYC[J]. Mechanical Design, 2010, 27(10): 18-21. | |
| 4 | ZHAO J, WONG P K, MA X, et al. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy[J]. Vehicle System Dynamics, 2017, 55(1): 72-103. |
| 5 | KARBALAEI R, GHAFFARI A, KAZEMI R, et al. Design of an integrated AFS/DYC based on fuzzy logic control[C]. 2007 IEEE International Conference on Vehicular Electronics and Safety. IEEE, 2007: 1-6. |
| 6 | 刘力, 罗禹贡, 江青云, 等. 基于广义预测理论的AFS/DYC底盘一体化控制[J]. 汽车工程, 2011, 33(1): 52-55. |
| LIU L, LUO Y G, JIANG Q Y, et al. Integrated control of AFS/DYC chassis based on generalized prediction theory[J]. Automotive Engineering, 2011, 33(1): 52-55. | |
| 7 | JIN X, YU Z, YIN G, et al. Improving vehicle handling stability based on combined AFS and DYC system via robust Takagi-Sugeno fuzzy control[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(8): 2696-2707. |
| 8 | CHENG S, LI L, LIU C Z, et al. Robust LMI-based H-infinite controller integrating AFS and DYC of autonomous vehicles with parametric uncertainties[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 51(11): 6901-6910. |
| 9 | ZHANG H, WANG J. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach[J]. IEEE Transactions on Vehicular Technology, 2016, 65(1): 489-494. |
| 10 | LIANG J, LU Y, YIN G, et al. A distributed integrated control architecture of AFS and DYC based on MAS for distributed drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5565-5577. |
| 11 | GANG L, ZONG C F, ZHENG H Y, et al. Vehicle active front steering and yaw moment integrated control[C]. Proceedings 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE). IEEE, 2011: 787-790. |
| 12 | 蔡英凤, 臧勇, 孙晓强, 等. 基于可拓切换控制方法的智能车辆车道保持系统研究[J]. 中国公路学报, 2019, 32(6): 43-52. |
| CAI Y F, ZANG Y, SUN X Q, et al. Research on intelligent vehicle lane keeping system based on extendable switching control method[J]. China Journal of Highway and Transport, 2019, 32(6): 43-52. | |
| 13 | 蔡英凤, 秦顺琪, 臧勇, 等. 基于可拓优度评价的智能汽车横向轨迹跟踪控制方法[J]. 汽车工程, 2019, 41(10): 1189-1196. |
| CAI Y F, QIN S Q, ZANG Y, et al. Lateral trajectory tracking and control method of intelligent automobile based on extendable merit evaluation[J]. Automotive Engineering, 2019, 41(10): 1189-1196. | |
| 14 | 臧勇, 蔡英凤, 孙晓强, 等. 基于可拓博弈的智能汽车轨迹跟踪协调控制方法研究[J]. 机械工程学报, 2022, 58(8): 181-194. |
| ZANG Y, CAI Y F, SUN X Q, et al. Research on coordinated control method of intelligent vehicle trajectory tracking based on extendable game[J]. Journal of Mechanical Engineering, 2022, 58(8): 181-194. | |
| 15 | 蔡英凤, 臧勇, 孙晓强,等. 自动驾驶汽车横向可拓预瞄切换控制系统研究[J]. 汽车工程, 2018, 40(9): 1032-1039. |
| CAI Y F, ZANG Y, SUN X Q, et al. Research on transverse extendable pre-sight switching control system for autonomous vehicles[J]. Automotive Engineering, 2018, 40(9): 1032-1039. | |
| 16 | 张志勇, 龙凯, 杜荣华, 等. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| ZHANG Z Y, LONG K, DU R H, et al. Coordinated tracking and control of high-speed overtaking trajectory of autonomous vehicles[J]. Automotive Engineering, 2021, 43(7): 995-1004. | |
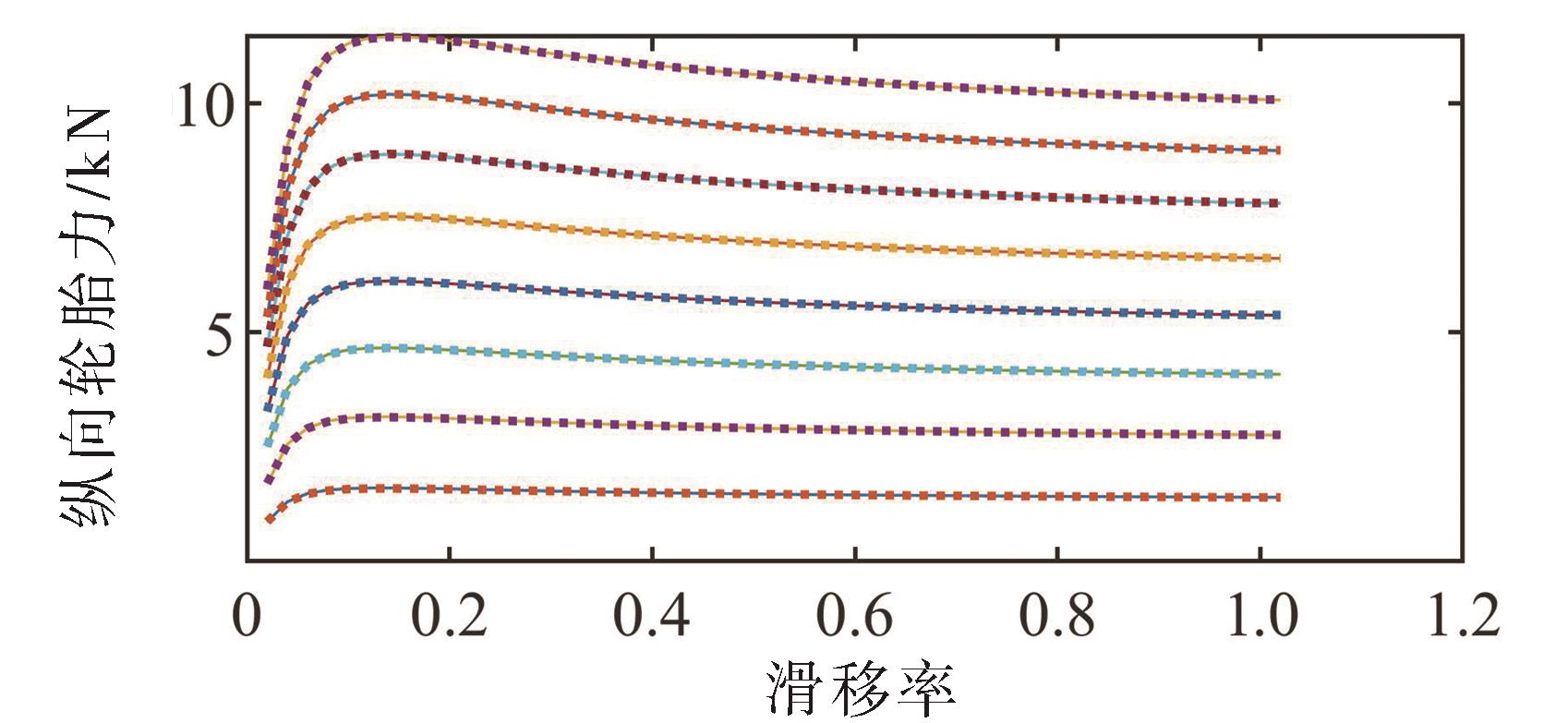
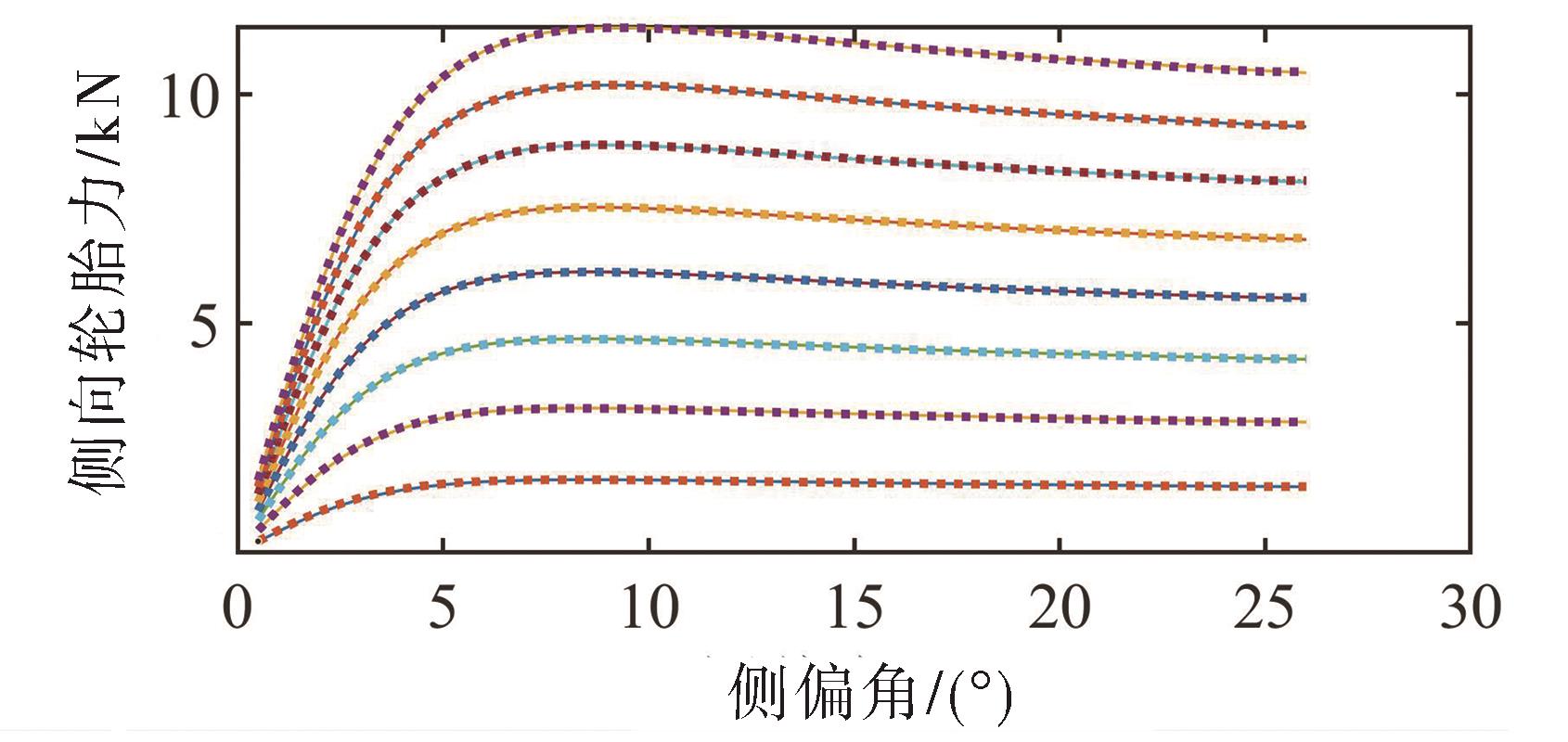
| 17 | 郑香美, 高兴旺, 赵志忠. 基于“魔术公式”的轮胎动力学仿真分析[J]. 机械与电子, 2012(9): 16-20. |
| ZHENG X M, GAO X W, ZHAO Z Z. Simulation analysis of tire dynamics based on “Magic Formula”[J]. Machinery & Electronics, 2012(9): 16-20. | |
| 18 | 蔡文, 杨春燕. 可拓学的基础理论与方法体系[J]. 科学通报, 2013, 58(13): 1190-1199. |
| CAI W, YANG C Y. Basic theory and methodology of extensibility[J]. Chinese Science Bulletin, 2013, 58(13): 1190-1199. | |
| 19 | 陈无畏, 孙晓文, 汪洪波. 汽车差动助力转向系统的可拓协调控制[J]. 中国科学: 技术科学, 2017, 47(3): 324-335. |
| CHEN W W, SUN X W, WANG H B. Extendable coordinated control of automotive differential power steering system[J]. Science China Technological Sciences, 2017, 47(3): 324-335. | |
| 20 | SMARANDACHE F. Generalizations of the distance and dependent function in extenics to 2D, 3D, and n-D[J]. Progress in Physics, 2012, 12(8): 1-16. |
| 21 | MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| 22 | WILLEMS J C. Least squares stationary optimal control and the algebraic Riccati equation[J]. IEEE Transactions on Automatic Control, 1971, 16(6): 621-634. |
| 23 | 曹坤, 罗禹贡, 戴一凡, 等. 分布式电驱动车辆纵-横-垂向力协同控制[J]. 汽车工程, 2015, 37(9): 985-991. |
| CAO K, LUO Y G, DAI Y F, et al. Collaborative control of vertical-horizontal-vertical force of distributed electric drive vehicles[J]. Automotive Engineering, 2015, 37(9): 985-991. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [3] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [4] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [5] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [6] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [7] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [8] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [9] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [10] | Zixian Li,Shiju Pan,Youchun Xu. Coordinated Control of AFS and DYC for 8-wheel Distributed Electric Drive Vehicle [J]. Automotive Engineering, 2023, 45(3): 409-420. |
| [11] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [12] | Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid [J]. Automotive Engineering, 2022, 44(8): 1173-1182. |
| [13] | Zhenhai Gao,Xiangtong Yan,Fei Gao. A Decision-making Method for Longitudinal Autonomous Driving Based on Inverse Reinforcement Learning [J]. Automotive Engineering, 2022, 44(7): 969-975. |
| [14] | Sensen Cong,Feng Gao,Shucai Xu. Cooperative Control of Vehicle Lateral and Longitudinal Stability Based on Dynamic Stability Region [J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [15] | Dafang Wang,Jingdong Du,Jiang Cao,Mei Zhang,Gang Zhao. Research on Style Transfer Network for Autonomous Driving Data Generation [J]. Automotive Engineering, 2022, 44(5): 684-690. |