Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (6): 1031-1039.doi: 10.19562/j.chinasae.qcgc.2023.06.013
Special Issue: 底盘&动力学&整车性能专题2023年
Previous Articles Next Articles
Jiahao Zhao1,Zhiquan Qi1( ),Zhifeng Qi2,Hao Wang2,Lei He2
),Zhifeng Qi2,Hao Wang2,Lei He2
Received:2022-11-29
Revised:2023-01-02
Online:2023-06-25
Published:2023-06-16
Contact:
Zhiquan Qi
E-mail:qizhiquan@bit.edu.cn
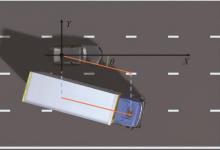
Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points[J].Automotive Engineering, 2023, 45(6): 1031-1039.

"

"

"
"

"

"

"

"


"

"
"


"

"
"


"

"
检测 方法 | 统计 数量 | 误差 均值/(°) | 占比/% | ||
|---|---|---|---|---|---|
误差5° 以内 | 误差10° 以内 | 误差20° 以内 | |||
模型3D 目标检测 | 204 | 5.61 | 81.9 | 93.1 | 96.5 |
特征点 朝向角计算 | 160 | 3.98 | 83.1 | 96.8 | 99.4 |
"
| 模型 | fps | 参数量 |
|---|---|---|
| 无特征点检测分支 | 103.4 | 25.77×106 |
| 增加特征点检测模型 | 62.8 | 42.30×106 |
"
| 类别 | 召回率/% | 准确率/% |
|---|---|---|
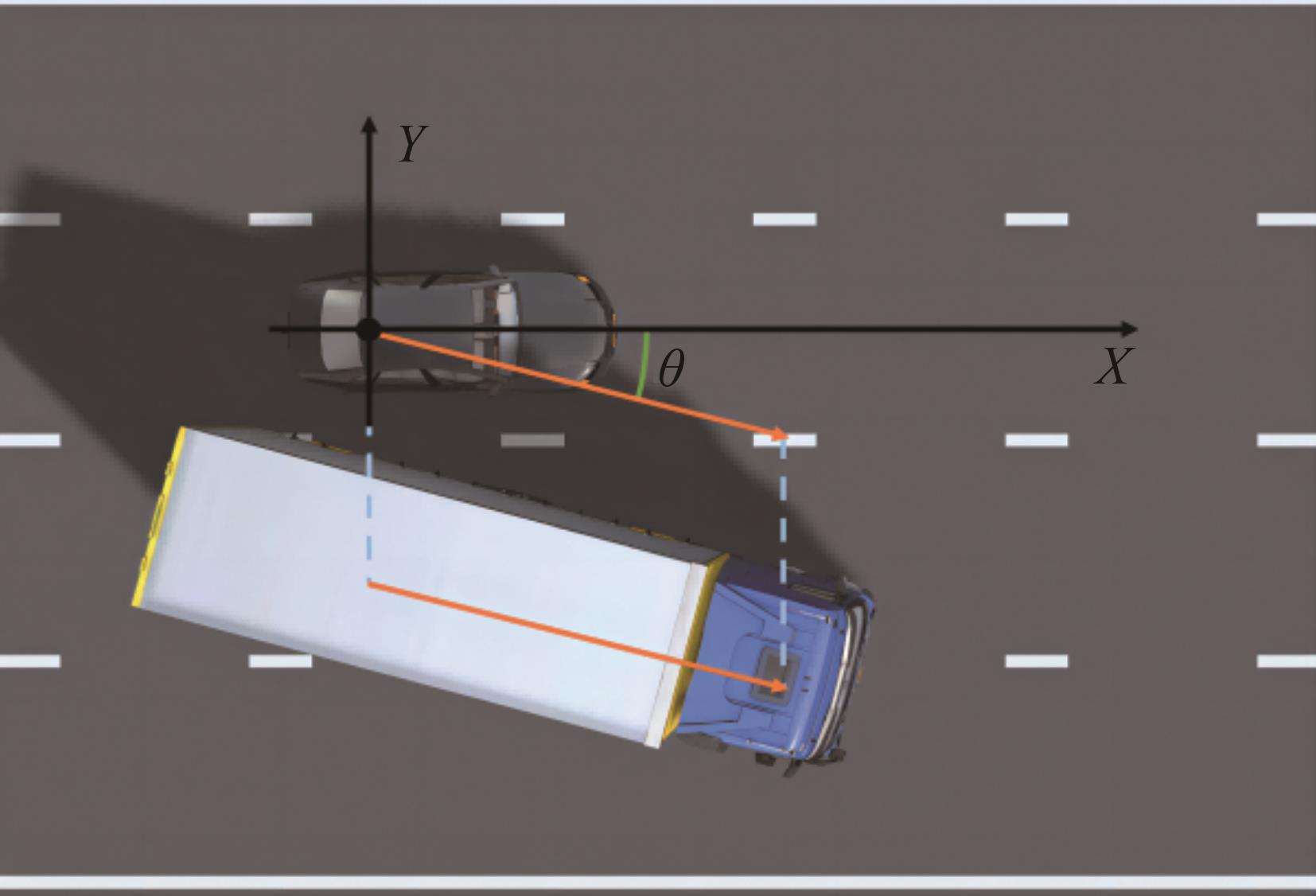
| 轮胎 | 82.3 | 98.3 |
| 接地点 | 87.2 | 98.5 |
| 中心点 | 81.0 | 97.8 |
| 上顶点 | 83.2 | 98.3 |
"
| 类别 | 平均误差/pixel | 特征点数量 | |
|---|---|---|---|
| X | Y | ||
| 接地点 | 5.87 | 3.06 | 704 |
| 中心点 | 4.65 | 3.34 | 749 |
| 上顶点 | 5.06 | 3.54 | 725 |
| 总计 | 5.18 | 3.31 | 2 178 |
| 1 | STEIN G P, MANO O, SHASHUA A. Vision-based ACC with a single camera: bounds on range and range rate accuracy[C].IEEE IV2003 intelligent vehicles symposium. Proceedings (Cat. No. 03TH8683). IEEE, 2003: 120-125. |
| 2 | CHEN X, KUNDU K, ZHANG Z, et al. Monocular 3D object detection for autonomous driving[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 2147-2156. |
| 3 | CHABOT F, CHAOUCH M, RABARISOA J, et al. Deep manta: a coarse-to-fine many-task network for joint 2D and 3D vehicle analysis from monocular image[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2040-2049. |
| 4 | CHEN H, HUANG Y, TIAN W, et al. Monorun: monocular 3D object detection by reconstruction and uncertainty propagation[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 10379-10388. |
| 5 | CHEN Y, TAI L, SUN K, et al. Monopair: monocular 3D object detection using pairwise spatial relationships[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 12093-12102. |
| 6 | ZHOU X, WANG D, KRÄHENBÜHL P. Objects as points[J]. arXiv preprint arXiv:, 2019. |
| 7 | LIU Z, WU Z, TÓTH R. Smoke: single-stage monocular 3D object detection via keypoint estimation[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2020: 996-997. |
| 8 | MA X, ZHANG Y, XU D, et al. Delving into localization errors for monocular 3D object detection[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 4721-4730. |
| 9 | ZHANG Y, LU J, ZHOU J. Objects are different: flexible monocular 3D object detection[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 3289-3298. |
| 10 | WANG T, ZHU X, PANG J, et al. Fcos3D: fully convolutional one-stage monocular 3D object detection[C].Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 913-922. |
| 11 | WANG Y, CHAO W L, GARG D, et al. Pseudo-lidar from visual depth estimation: bridging the gap in 3D object detection for autonomous driving[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 8445-8453. |
| 12 | READING C, HARAKEH A, CHAE J, et al. Categorical depth distribution network for monocular 3D object detection[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 8555-8564. |
| 13 | PARK D, AMBRUS R, GUIZILINI V, et al. Is pseudo-lidar needed for monocular 3D object detection?[C].Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 3142-3152. |
| 14 | 薛艺舟. 面向自动驾驶的激光雷达与相机联合标定方法研究[D].北京:北京建筑大学,2021. |
| XUE Y Z. Research on the joint calibration method of li dar and camera for autonomous driving [D]. Beijing: Beijing University of Civil Engineering and Architecture,2021. | |
| 15 | REDMON J, FARHADI A. Yolov3: an incremental improvement[J]. arXiv preprint arXiv:, 2018. |
| 16 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Ze Gao, Zunkang Chu, Jiasheng Shi, Fu Lin, Weixiong Rao, Haiyan Yu. Research on Fast Prediction Method of Stress Field of Automotive Parts Based on Graph Network [J]. Automotive Engineering, 2024, 46(1): 170-178. |
| [3] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [4] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [5] | Weiguo Liu,Zhiyu Xiang,Rui Liu,Guodong Li,Zixu Wang. Research on End-to-End Vehicle Motion Planning Method Based on Deep Learning [J]. Automotive Engineering, 2023, 45(8): 1343-1352. |
| [6] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [7] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [8] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [9] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [10] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [11] | Fengchong Lan,Jikai Chen,Jiqing Chen,Xinping Jiang,Zihan Li,Wei Pan. Research on Lithium Battery Remaining Useful Life Prediction Method Driven by Real Vehicle Data [J]. Automotive Engineering, 2023, 45(2): 175-182. |
| [12] | Linhui Li,Xinliang Zhang,Yifan Fu,Jing Lian,Jiaxu Ma. Research on Visible Light and Infrared Post-Fusion Detection Based on TC-YOLOv7 Algorithm [J]. Automotive Engineering, 2023, 45(12): 2280-2290. |
| [13] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [14] | Xiaojun Zhang,Jingzhe Xi,Yanlei Shi,Anlu Yuan. Lightweight YOLOv7-R Algorithm for Road-Side View Target Detection [J]. Automotive Engineering, 2023, 45(10): 1833-1844. |
| [15] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
|