Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (3): 361-371.doi: 10.19562/j.chinasae.qcgc.2023.03.003
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Ziwei Zhang1,Ling Zheng1,2( ),Yinong Li1,2,Xuqiang Qiao1,Hao Zheng1,Kan Wang1
),Yinong Li1,2,Xuqiang Qiao1,Hao Zheng1,Kan Wang1
Received:2022-10-12
Revised:2022-11-08
Online:2023-03-25
Published:2023-03-22
Contact:
Ling Zheng
E-mail:zling@cqu.edu.cn
Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle[J].Automotive Engineering, 2023, 45(3): 361-371.

"

"
"
"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| th/s | 1.5 | (afmin, afmax) | (-2.5, 2.5) |
| ds/m | 5 | (υΔdmin, υΔdmax) | (-3, 3) |
| KL | 1.0 | (υΔvmin, υΔvmax) | (-1, 1) |
| TL | 0.4 | (υafmin, υafmax) | (-0.1, 0.1) |
| tTTC/s | -3 | (υafdesmin, υafdesmax) | (-0.1, 0.1) |
| ds0/m | 5 | (Δdmin, Δdmax) | (-5, 5) |
| Ts/s | 0.05 | (Δvmin, Δvmax) | (-3, 3) |
| p | 20 | (afdesmin, afdesmax) | (-6, 6) |
| α | 0.95 |
"
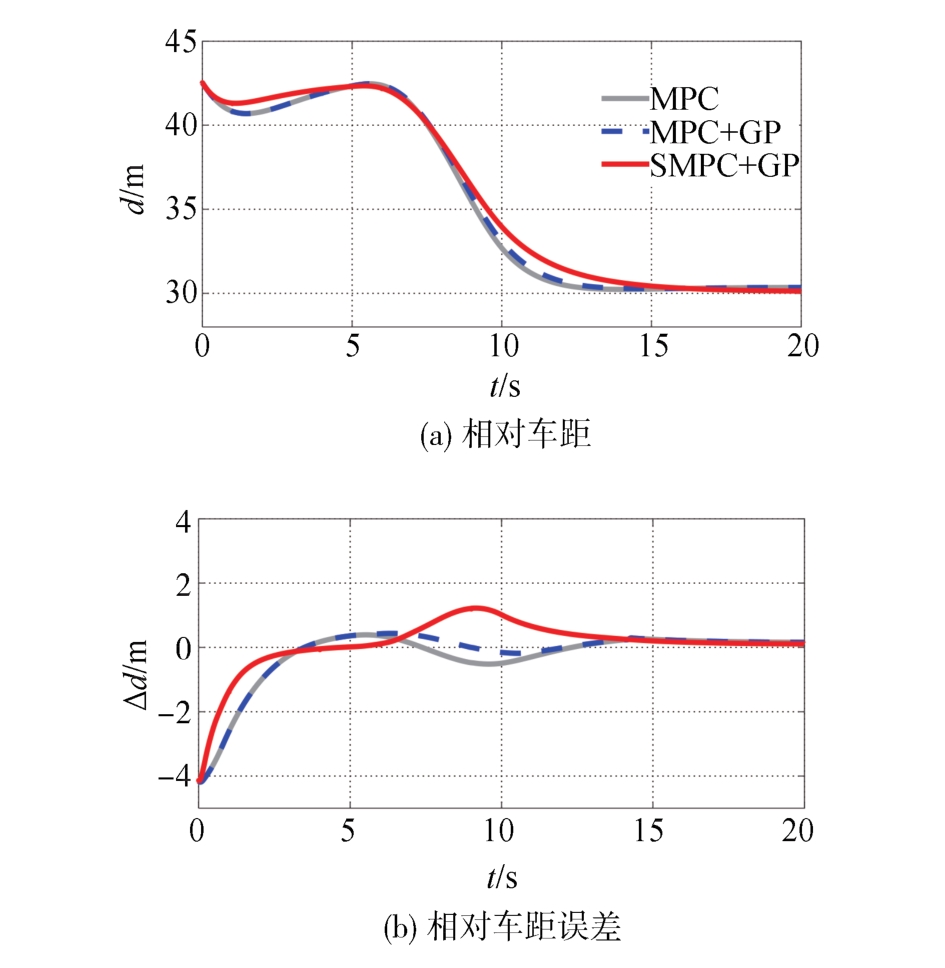
| 控制器 | 前车运动状态预测 | 预测结果不确定性 |
|---|---|---|
| MPC | × | × |
| MPC+GP | √ | × |
| SMPC+GP | √ | √ |
"

"

"
"
"
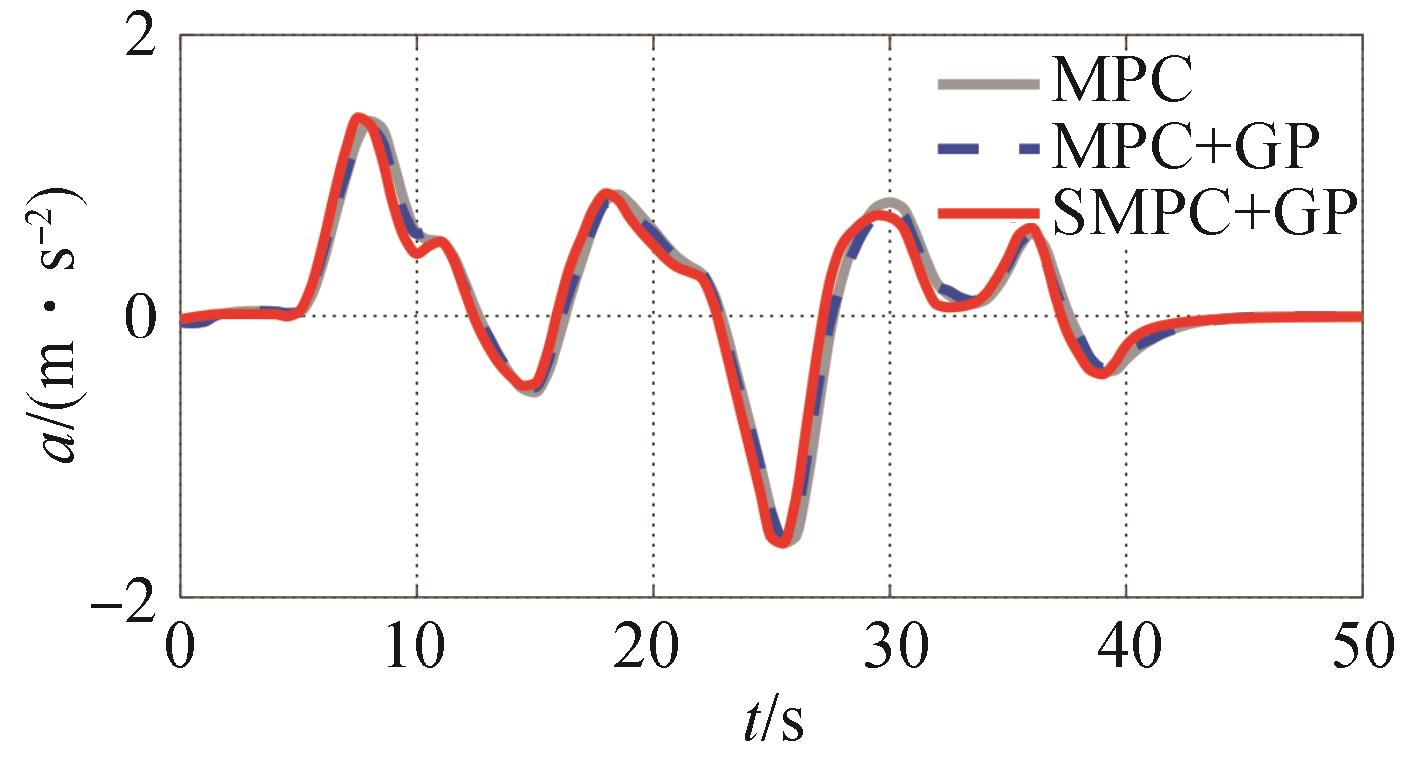
| 控制器 | max(Δd)/m | rms(Δd)/m | max(Δv)/(km·h-1) | rms(Δv)/(km·h-1) | max(a)/(m·s-2) | rms(a)/(m·s-2) |
|---|---|---|---|---|---|---|
| MPC | 3.67 | 1.41 | 17.42 | 6.48 | 2.27 | 0.97 |
| MPC+GP | 1.83(↓50.14%) | 0.79(↓43.97%) | 15.79(↓9.36%) | 5.91(↓8.80%) | 2.31(↑1.76%) | 1.00(↑3.09%) |
| SMPC+GP | 2.18(↓40.60%) | 0.80(↓43.26%) | 12.52(↓28.13%) | 5.02(↓22.53%) | 2.52(↑11.01%) | 0.98(↑1.03%) |
"


"

"
"
"
| 控制器 | max(Δd)/m | rms(Δd)/m | max(Δv)/(km·h-1) | rms(Δv)/(km·h-1) | max(a)/(m·s-2) | rms(a)/(m·s-2) |
|---|---|---|---|---|---|---|
| MPC | 4.19 | 0.96 | 11.75 | 4.64 | 2.41 | 0.94 |
| MPC+GP | 4.19(-0%) | 0.95(↓1.04%) | 11.31(↓3.74%) | 4.54(↓2.16%) | 2.41(-0%) | 0.92(↓2.13%) |
| SMPC+GP | 4.17(↓0.48%) | 0.80(↓16.67%) | 10.00(↓14.89%) | 4.01(↓13.58%) | 4.32(↑79.25%) | 0.99(↑5.32%) |
"
"
| 控制器 | max(Δd)/m | rms(Δd)/m | max(Δv)/(km·h-1) | rms(Δv)/(km·h-1) | max(a)/(m·s-2) | rms(a)/(m·s-2) |
|---|---|---|---|---|---|---|
| MPC | 0.99 | 0.51 | 9.91 | 3.28 | 1.66 | 0.56 |
| MPC+GP | 0.77(↓22.22%) | 0.46(↓9.80%) | 9.45(↓4.64%) | 3.14(↓4.27%) | 1.63(↓1.81%) | 0.54(↓4.03%) |
| SMPC+GP | 0.84(↓15.15%) | 0.22(↓56.86%) | 8.01(↓19.17%) | 2.71(↓17.38%) | 1.74(↑4.82%) | 0.54(↓2.61%) |
"

"

"
"
| 1 | HUANG Y J, DING H T, ZHANG Y B, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics, 2020, 62(2): 1376-1386. |
| 2 | ZHANG J, IOANNOU P A. Longitudinal control of heavy trucks in mixed traffic: environmental and fuel economy considerations[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(1):92-104. |
| 3 | ABDULLAH R, HUSSAIN A, WARWICK K, et al. Autonomous intelligent cruise control using a novel multiple-controller framework incorporating fuzzy-logic-based switching and tuning[J]. Neurocomputing, 2008, 71(13-15): 2727-2741. |
| 4 | 李以农, 冀杰, 郑玲, 等. 智能车辆自适应巡航控制系统建模与仿真[J]. 中国机械工程, 2010, 21(11): 1374-1381. |
| LI Y N, JI J, ZHENG L, et al. Modeling and simulation of adaptive cruise control system for intelligent vehicles[J]. China Mechanical Engineering, 2010, 21(11): 1374-1381. | |
| 5 | 张亮修, 吴光强, 郭晓晓. 车辆自适应巡航控制系统的建模与分层控制[J]. 汽车工程, 2018, 40(5): 547-553. |
| ZHANG L X, WU G Q, GUO X X. Modeling and hierarchical control of vehicle ACC system[J]. Automotive Engineering, 2018, 40(5): 547-553. | |
| 6 | CHEN S P, CHEN H Y, NEGRUT D. Implementation of MPC‑based path tracking for autonomous vehicles considering three vehicle dynamics models with different fidelities[J]. Automotive Innovation, 2020, 3: 386-399. |
| 7 | 吴光强, 郭晓晓, 张亮修. 汽车自适应巡航跟车多目标鲁棒控制算法设计[J]. 哈尔滨工业大学学报, 2016, 48(1): 80-86. |
| WU G Q, GUO X X, ZHANG L X. Multi-objective robust adaptive cruise control algorithm design of car following model[J]. Journal of Harbin Institute of Technology, 2016, 48(1): 80-86. | |
| 8 | 章军辉, 李庆, 陈大鹏. 车辆多模式多目标自适应巡航控制[J]. 电子科技大学学报, 2018, 47(3): 368-375. |
| ZHANG J H, LI Q, CHEN D P. Multi-objective adaptive cruise control with multi-mode strategy [J]. Journal of University of Electronic Science and Technology of China, 2018, 47(3): 368-375. | |
| 9 | 赵树恩, 冷姚, 邵毅明. 车辆多目标自适应巡航显式模型预测控制[J]. 交通运输工程学报, 2020, 20(3): 206-216. |
| ZHAO S E, LENG Y, SHAO Y M. Explicit model predictive control of multi-objective adaptive cruise of vehicle[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 206-216. | |
| 10 | LIANG Y X, LI Y N, YU Y H, et al. Path-following control of autonomous vehicles considering coupling effects and multi-source system uncertainties[J]. Automotive Innovation, 2021, 4: 284-300. |
| 11 | 李升波. 车辆多目标协调式自适应巡航控制[D]. 北京: 清华大学, 2009. |
| LI S B. Vehicular multi-objective coordinated adaptive cruise control[D]. Beijing: Tsinghua University, 2009. | |
| 12 | 戴旭彬, 孙涛, 夏维. 基于MPC的自适应巡航算法改进研究[J]. 机电工程, 2018, 35(6): 644-648,657. |
| DAI X B, SUN T, XIA W. Improvement of adaptive cruise algorithm based on MPC[J]. Journal of Mechanical& Electrical Engineering, 2018, 35(6): 644-648,657. | |
| 13 | HE D F, PENG B B. Gaussian learning-based fuzzy predictive cruise control for improving safety and economy of connected vehicles[J]. IET Intelligent Transport Systems, 2020, 14(5): 346-355. |
| 14 | ZHANG D Z, LI K Q, WANG J Q. A curving ACC system with coordination control of longitudinal car-following and lateral stability[J]. Vehicle System Dynamics, 2012, 50(7): 1085-1102. |
| 15 | 黄菊花, 邹汉鹏, 刘明春. 考虑测量噪声的车辆自适应巡航控制系统纵向跟车研究[J]. 北京理工大学学报, 2020, 40(3): 254-261. |
| HUANG J H, ZOU H P, LIU M C. Research on longitudinal tracking of adaptive cruise control system for vehicles considering of measurement noise[J]. Transactions of Beijing Institute of Technology, 2020, 40(3): 254-261. | |
| 16 | SAKHDARI B, AZAD N L. Adaptive tube-based nonlinear mpc for ecological autonomous cruise control of plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 11390-11401. |
| 17 | 杨威. 高速跟车工况下智能汽车拟人化驾驶决策方法研究[D]. 重庆: 重庆大学, 2020. |
| YANG W. Study on decision-planning systems of the automated vehicle based on driver’s personality under car following in highway conditions [D]. Chongqing: Chongqing University, 2020. | |
| 18 | QIAO X Q, LI Y N, ZHENG L, et al. Predicting vehicle states of naturalistic driving data based on adaptive optimization gaussian process regression[C]. 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), 2021: 418-423. |
| 19 | SCHILDBACH G, CALAFIORE G C, FAGIANO L, et al. Randomized model predictive control for stochastic linear systems[C]. 2012 American Control Conference (ACC), 2012:417-422. |
| 20 | LIU C C, CARVALHO A, SCHILDBACH G, et al. Stochastic predictive control for lane keeping assistance systems using a linear time-varying model[C]. 2015 American Control Conference (ACC), 2015: 3355-3360. |
| 21 | GRAY A, GAO Y Q, LIN T, et al. Stochastic predictive control for semi-autonomous vehicles with an uncertain driver model[C]. 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), 2013: 2329-2334. |
| 22 | CARVALHO A, GAO Y Q, LEFEVRE S, et al. Stochastic predictive control of autonomous vehicles in uncertain environments[C]. 12th International Symposium on Advanced Vehicle Control, 2014. |
| 23 | BRUEDIGAM T. Stochastic model predictive control- a simulation example[J]. 2021, arXiv:. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [3] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [4] | Xinrong Zhang,Yuhang Tan,Yifan Jia,Jin Huang,Quanning Xu. Robust Control of Path Tracking for Four-Wheel Independent Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(2): 253-262. |
| [5] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [6] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [7] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [8] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [9] | Chao Zhao,Dexu Bu,Lipeng Cao,Keqiang Li,Yugong Luo. Safety Control Strategy for Adaptive Cruise Control System in Heavy Rainfall Scenes [J]. Automotive Engineering, 2022, 44(8): 1117-1125. |
| [10] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |
| [11] | Jun Li,Wenxing Wan,Sanqiang Hao,Wu Qin,Feifei Liu. Research on Model Predictive Control of Autonomous Vehicle Path Tracking Under Complex Road Condition [J]. Automotive Engineering, 2022, 44(5): 664-674. |
| [12] | Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion [J]. Automotive Engineering, 2022, 44(3): 350-361. |
| [13] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [14] | Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System [J]. Automotive Engineering, 2022, 44(12): 1809-1817. |
| [15] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |