Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (10): 1494-1502.doi: 10.19562/j.chinasae.qcgc.2022.10.003
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Hongwei Wang( ),Chenyu Liu,Lei Li,Haotian Zhang
),Chenyu Liu,Lei Li,Haotian Zhang
Received:2022-04-10
Revised:2022-05-14
Online:2022-10-25
Published:2022-10-21
Contact:
Hongwei Wang
E-mail:wanghw0819@163.com
Hongwei Wang,Chenyu Liu,Lei Li,Haotian Zhang. Research on Trajectory Tracking Control of Unmanned Vehicle Based on Efficient NMPC Algorithm[J].Automotive Engineering, 2022, 44(10): 1494-1502.
"
"
"
| 步骤 | C/GMRES算法 |
|---|---|
| 步骤1 | 输入 寻找满足 |
| 步骤2 | 当 |
| 步骤3 | 当 |
"
| 步骤 | improved-C/GMRES算法 |
|---|---|
| 步骤1 | 输入 初始化寻找满足条件 |
| 步骤2 | 当 令 |
| 步骤3 | 设置仿真时间 |
| 步骤4 | 当 当 其他情况下, 对初始状态 |
| 步骤5 | 通过算法(1)和(2)步骤得到最优控制序列 |
"
| 参数 | 数值 |
|---|---|
| 车身质量 | 1 560 |
| 质心到前轴的距离 | 1.156 |
| 质心到后轴的距离 | 2.035 |
| 转动惯量 | 1 536.7 |
| 轮胎模型形状因子 | 2.50 |
| 轮胎模型曲率因子 | 1.198 |
"
| 参数 | 数值 |
|---|---|
| 辨识系数 | 2.64× |
| 辨识系数 | 3.34× |
| 权重系数矩阵 | |
| 权重系数矩阵 | |
| 调整因子 | |
| 调整因子 | 3.3 |
"
"
"
"
"
"
"
"
"
| 误差范围 | improved-C/GRES/次 | NMPC/次 |
|---|---|---|
| [0,0.050) | 11 | 0 |
| [0.050,0.100) | 35 | 0 |
| [0.100,0.150) | 4 | 35 |
| [0.150,0.200) | 0 | 8 |
| [0.200,0.250) | 0 | 6 |
| [0.150,0.200) | 0 | 1 |
"
| 误差范围 | improved-C/GRES | NMPC |
|---|---|---|
| [0,0.100) | 34 | 0 |
| [0.100,0.200) | 11 | 0 |
| [0.200,0.300) | 5 | 5 |
| [0.300,0.400) | 0 | 36 |
| [0.400,0.500) | 0 | 9 |
"
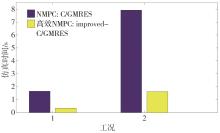
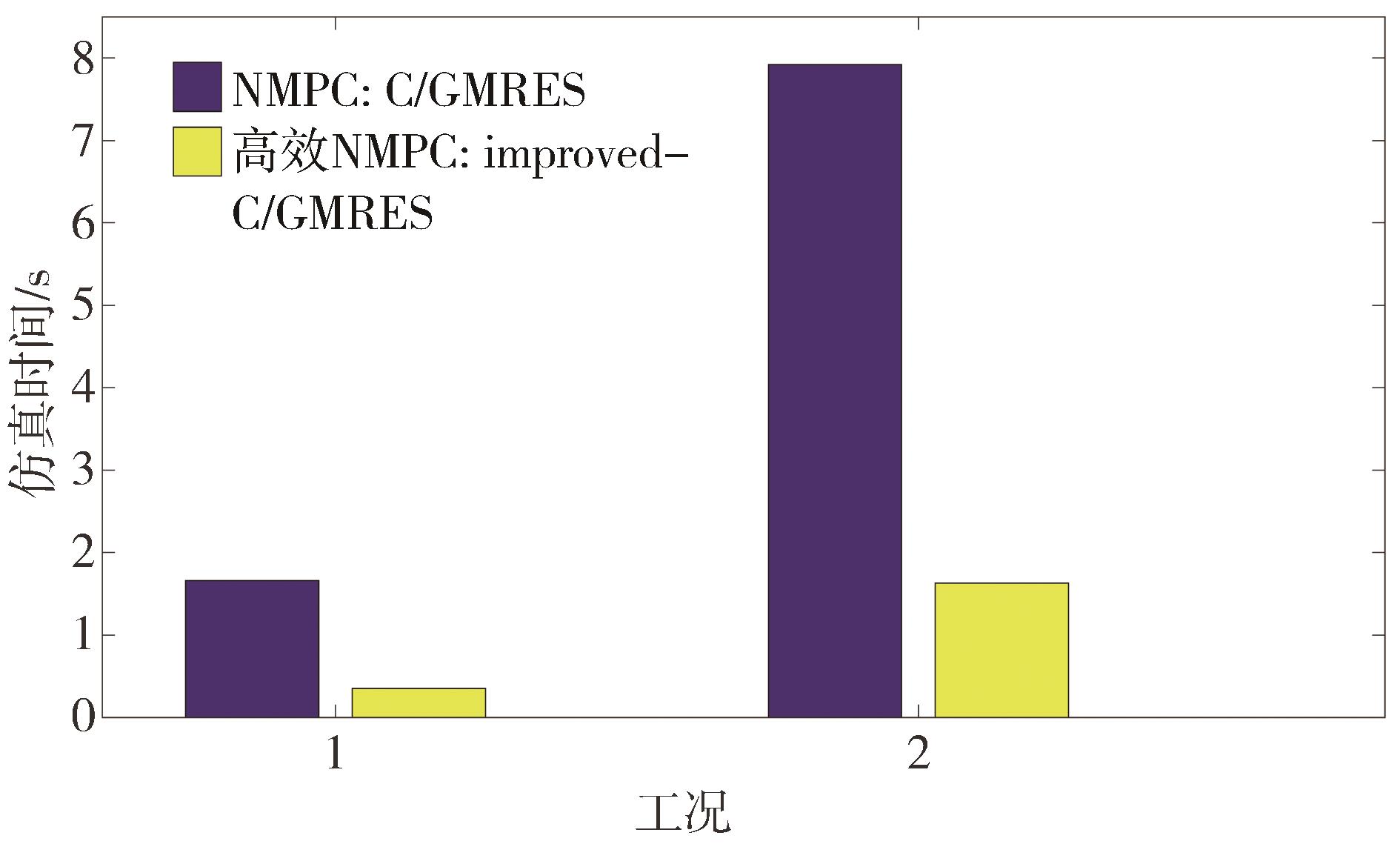
| 控制方法 | 仿真条件 | 平均计算时间/ms |
|---|---|---|
| improved--C/GMRES | 工况1 | 18.9 |
| GMRES | 工况1 | 116.7 |
| improved-C/GMRES | 工况2 | 25.6 |
| GMRES | 工况2 | 132.8 |
"
| 1 | ZHOU X, YU X, ZHANG Y, et al. Trajectory planning and tracking strategy applied to an unmanned ground vehicle in the presence of obstacles[J]. IEEE Transactions on Automation Science and Engineering, 2021, 18(4): 1575-1589. |
| 2 | 潘世举, 李华, 苏致远, 等. 基于跟踪误差模型的智能车辆轨迹跟踪方法[J]. 汽车工程, 2019, 41(9): 1021-1027. |
| PAN S J, LI H, SUN Z Y, et al. Trajeclory tracking method for intelligent vehicles based on tracking-error model[J]. Aulomotive Engineering, 2019, 41(9): 1021-1027. | |
| 3 | CHEN T, CHEN L, XU X, et al. Simultaneous path following and lateral stability control of 4WD-4WS autonomous electric vehicles with actuator saturation[J]. Advances in Engineering Software, 2019, 128: 46-54. |
| 4 | LIU W, WANG R, XIE C, et al. Investigation on adaptive preview distance path tracking control with directional error compensation[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2020, 234(4): 484-500. |
| 5 | CHATZIKOMIS C, SORNIOTTI A, GRUBER P, et al. Comparison of path tracking and torque-vectoring controllers for autonomous electric vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(4): 559-570. |
| 6 | WU X, ZHOU B, WEN G, et al. Intervention criterion and control research for active front steering with consideration of road adhesion[J]. Vehicle system dynamics, 2018, 56(4): 553-578. |
| 7 | 李斯旭, 徐彪, 胡满江, 等. 基于动力学模型预测控制的铰接车辆多点预瞄路径跟踪方法[J]. 汽车工程, 2021, 43(8): 1187-1194. |
| LI S X, XU B, HU M J, et al. A dynamic model predictive control approach for multipoint preview path tracking of articulated vehicles [J]. Aulomotive Engineering, 2021, 43(8): 1187-1194. | |
| 8 | CHEN L, LIU M, SHI Y, et al. Adaptive fault estimation for unmanned surface vessels with a neural network observer approach[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2021, 68(1): 416-425. |
| 9 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| 10 | SCHOLTE E, CAMPBELL M E. Robust nonlinear model predictive control with partial state information[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 636-651. |
| 11 | WAN Z, KOTHARE M V. Efficient scheduled stabilizing model predictive control for constrained nonlinear systems[J]. International Journal of Robust and Nonlinear Control: IFAC‐Affiliated Journal, 2003, 13(3‐4): 331-346. |
| 12 | ARIENS D, HOUSKA B, FERREAU H, et al. Acado for matlab user’s manual[J]. Optimization in Engineering Center (OPTEC), 2010, 1. |
| 13 | ZANON M, FRASCH J V, VUKOV M, et al. Model predictive control of autonomous vehicles[M]. Optimization and optimal control in automotive systems. Springer, Cham, 2014: 41-57. |
| 14 | DU X, HTET K K K, TAN K K. Development of a genetic-algorithm-based nonlinear model predictive control scheme on velocity and steering of autonomous vehicles[J]. IEEE Transactions on Industrial Electronics, 2016, 63(11): 6970-6977. |
| 15 | ZHANG Y, KHAJEPOUR A, HASHEMI E, et al. Reconfigurable model predictive control for articulated vehicle stability with experimental validation[J]. IEEE Transactions on Transportation Electrification, 2020, 6(1): 308-317. |
| 16 | GUO H, LIU F, XU F, et al. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 49(1): 2-13. |
| 17 | TAVERNINI D, METZLER M, GRUBER P, et al. Explicit nonlinear model predictive control for electric vehicle traction control[J]. IEEE Transactions on Control Systems Technology, 2018, 27(4): 1438-1451. |
| 18 | WANG Q, LIU Y, LIU H, et al. Parallel numerical continuation of periodic responses of local nonlinear systems[J]. Nonlinear Dynamics, 2020, 100(3): 2005-2026. |
| 19 | AGOUJIL S, BENTBIB A H, JBILOU K, et al. A minimal residual norm method for large-scale Sylvester matrix equations[J]. Electronic Transactions on Numerical Analysis, 2014, 43: 45-59. |
| 20 | OHTSUKA T. A continuation/GMRES method for fast computation of nonlinear receding horizon control[J]. Automatica, 2003, 40(4): 563-574. |
| 21 | GUO N, ZHANG X, ZOU Y, et al. A computationally efficient path-following control strategy of autonomous electric vehicles with yaw motion stabilization[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 728-739. |
| 22 | HU C, WANG R, YAN F, et al. Should the desired heading in path following of autonomous vehicles be the tangent direction of the desired path?[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 3084-3094. |
| 23 | BOYD S, BOYD S P, VANDENBERGHE L. Convex optimization[M]. Cambridge University Press, 2004. |
| 24 | SHEN C, BUCKHAM B, SHI Y. Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs[J]. IEEE Transactions on Control Systems Technology, 2016, 25(5): 1896-1904. |
| [1] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [2] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [3] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [4] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |
| [5] | Daofei Li,Anfei Zha,Biao Xu,Jiajie Zhang. Trajectory Tracking Control Algorithm of Emergency Collision Avoidance for Tractor Semi-trailer Combination [J]. Automotive Engineering, 2022, 44(7): 1098-1106. |
| [6] | Peijun Fang,Yingfeng Cai,Long Chen,Yubo Lian,Hai Wang,Yilin Zhong,Xiaoqiang Sun. Trajectory Tracking Control Method Based on Vehicle Dynamics Hybrid Model for Intelligent Vehicle [J]. Automotive Engineering, 2022, 44(10): 1469-1483. |
| [7] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [8] | Hai Wang,Yang Li,Yingfeng Cai,Kai Sun,Long Chen. 3D Real⁃Time Vehicle Tracking Based on Lidar [J]. Automotive Engineering, 2021, 43(7): 1013-1021. |
| [9] | Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. |
| [10] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [11] | Long Chen,Kai Zou,Yingfeng Cai,Chenglong Teng,Xiaoqiang Sun,Hai Wang. Longitudinal and Lateral Comprehensive Trajectory Tracking Control of Intelligent Vehicles Based on NMPC [J]. Automotive Engineering, 2021, 43(2): 153-161. |
| [12] | Yutian Zhang,Feiran Li,Hanqing Tian,Jibin Hu,Chao Wei,Wei Wu. Research on Decoupling Control of Integrated Dynamics System of Unmanned Vehicle Chassis [J]. Automotive Engineering, 2021, 43(11): 1673-1682. |
| [13] | Chen Long, Xie Yunpeng, Cai Yingfeng, Sun Xiaoqiang, Teng Chenglong, Zou Kai. Stable Tracking Control of Autonomous Vehicles at Extreme Conditions [J]. Automotive Engineering, 2020, 42(8): 1016-1026. |
| [14] | Zhang Lei, Zhao Xianhua, Wang Zhenpo. Study on Coordinated Control of Trajectory Tracking and Yaw Stability for Autonomous Four-wheel-independent-driving Electric Vehicles [J]. Automotive Engineering, 2020, 42(11): 1513-1521. |
| [15] | Peng Xiaoyan, Xie Hao, Huang Jing. Research on Local Path Planning Algorithm for Unmanned Vehicles [J]. Automotive Engineering, 2020, 42(1): 1-10. |