Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (5): 768-776.doi: 10.19562/j.chinasae.qcgc.2023.05.006
Special Issue: 智能网联汽车技术专题-规划&决策2023年
Previous Articles Next Articles
Lijun Qian1,2( ),Chen Chen1,Jian Chen1
),Chen Chen1,Jian Chen1
Received:2022-11-11
Revised:2022-12-04
Online:2023-05-25
Published:2023-05-26
Contact:
Lijun Qian
E-mail:qianlijun66@163.com
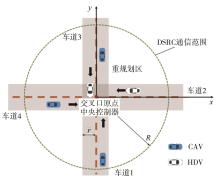
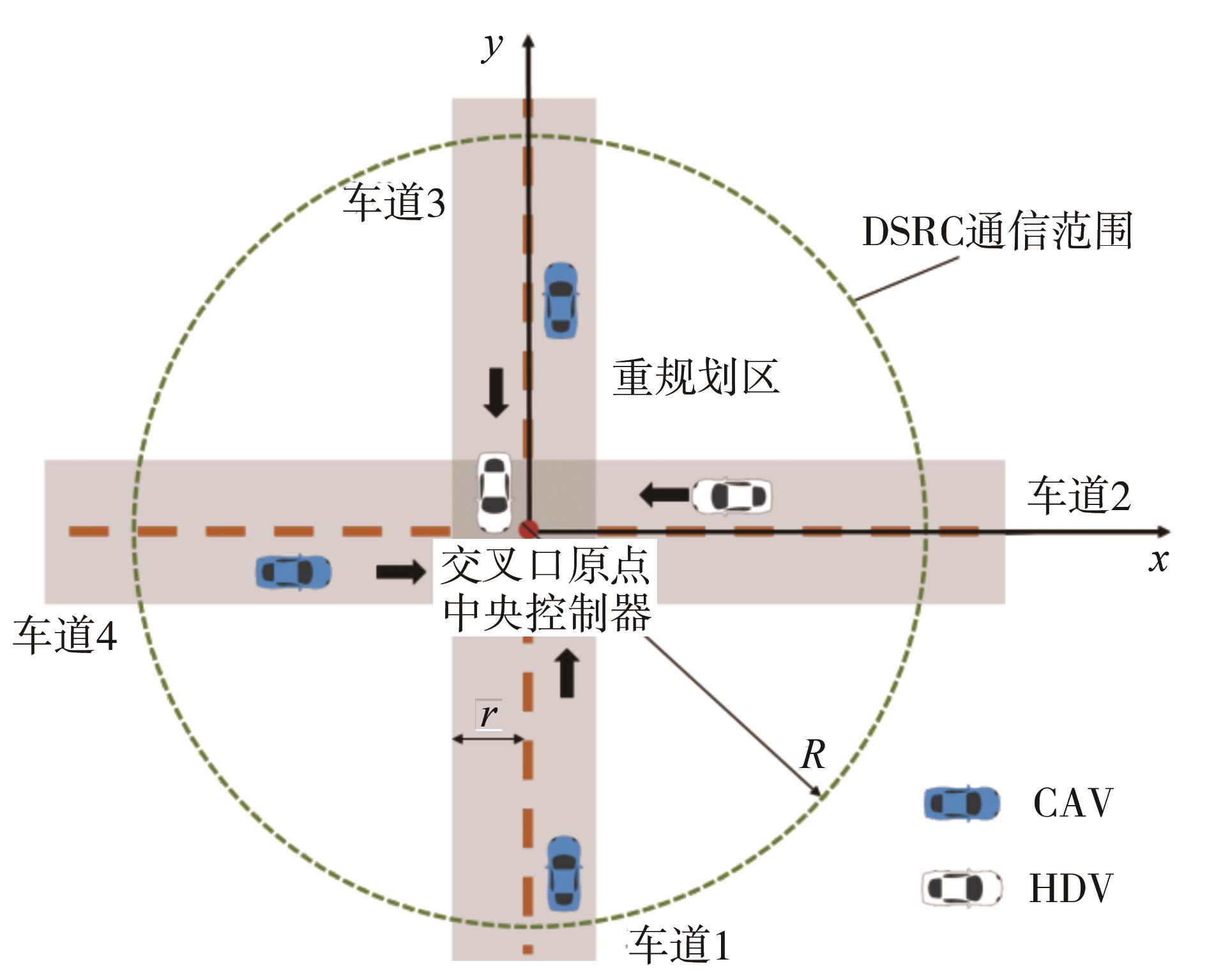
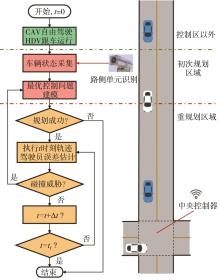
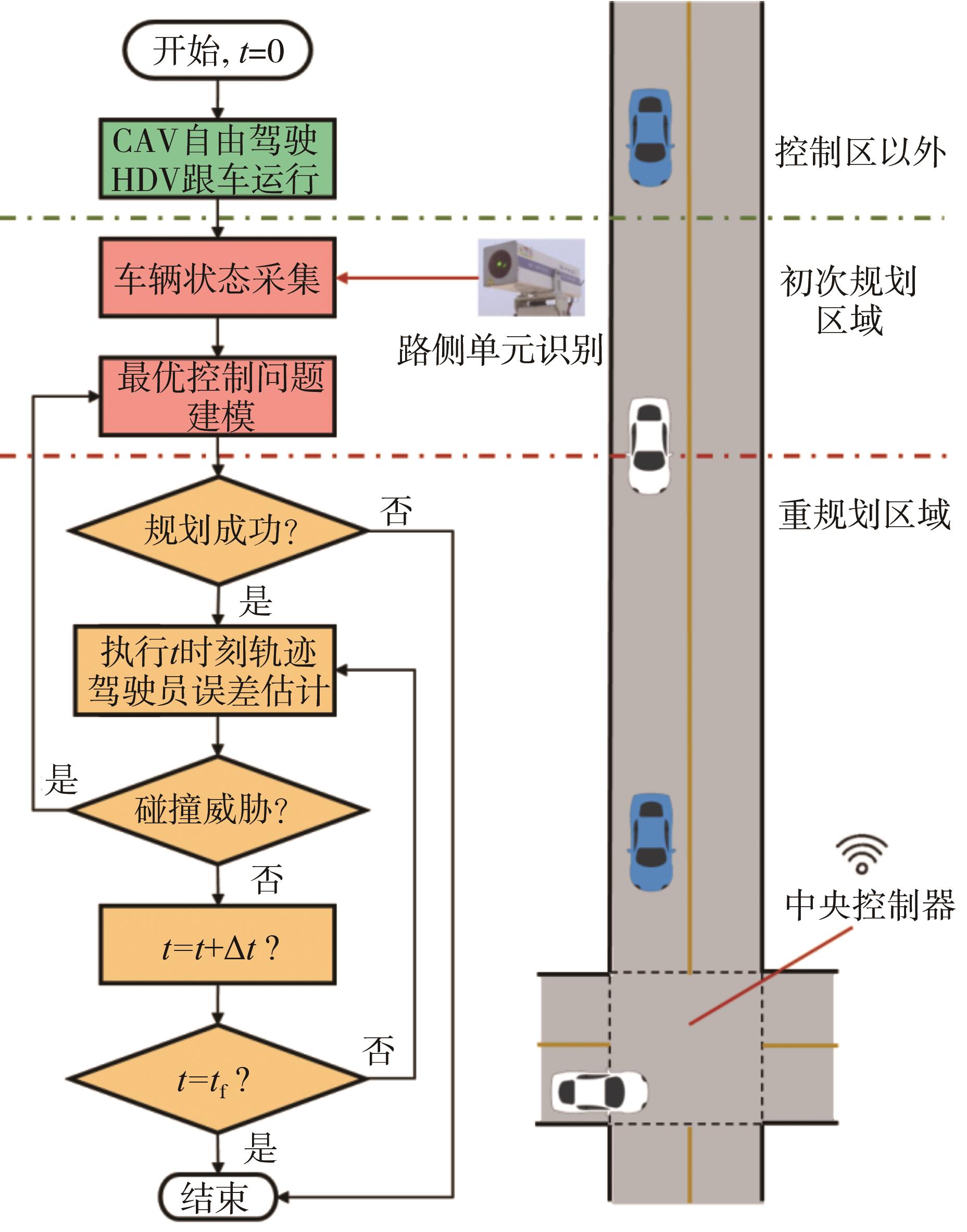
Lijun Qian,Chen Chen,Jian Chen. Centralized Trajectory Planning in an Unsignalized Intersection Environment Considering Driver Error[J].Automotive Engineering, 2023, 45(5): 768-776.
"
"
"

"

"
| 变量解释 | 变量符号 | 取值 |
|---|---|---|
| 权重系数 | 0.537 | |
| 权重系数 | 0.298 | |
| 权重系数 | 0.165 | |
| 交叉口控制范围/m | 100 | |
| 车道宽度/m | 3.5 | |
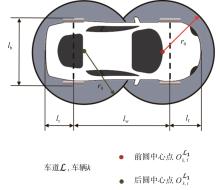
| 车辆轴距/m | 2.72 | |
| 车辆宽度/m | 1.85 | |
| 前悬长/m | 1.02 | |
| 后悬长/m | 0.98 | |
| 安全跟车间距/m | 5 | |
| 估计时长/s | 3 |
"
"
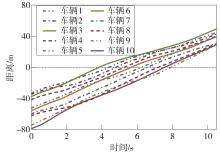
| 编号 | 初始位置/m | 种类 | 所处车道 |
|---|---|---|---|
| 1 | CAV | 车道4 | |
| 2 | HDV | 车道3 | |
| 3 | CAV | 车道1 | |
| 4 | CAV | 车道2 | |
| 5 | HDV | 车道4 | |
| 6 | CAV | 车道1 | |
| 7 | HDV | 车道3 | |
| 8 | HDV | 车道2 | |
| 9 | CAV | 车道4 | |
| 10 | HDV | 车道1 |
"

"

"
"
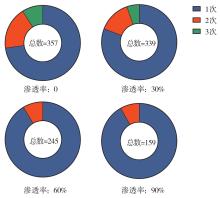
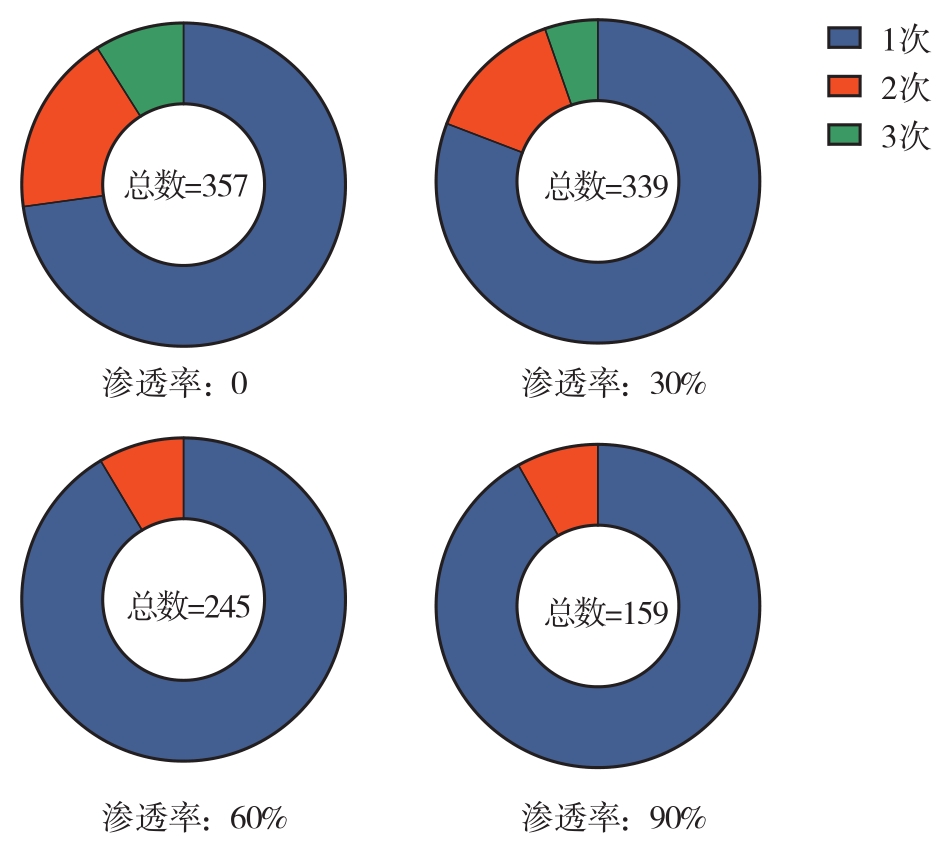
| 渗透率/% | 成功率/% | 渗透率/% | 成功率/% |
|---|---|---|---|
| 0 | 90.09 | 50 | 96.62 |
| 10 | 91.32 | 60 | 97.56 |
| 20 | 91.74 | 70 | 98.52 |
| 30 | 93.46 | 80 | 99.01 |
| 40 | 95.24 | 90 | 99.50 |
"
"

"
| 1 | 李杰, 曾叙砜, 李平, 等. 道路交通安全文献的知识可视化综述 [J] .交通信息与安全, 2020, 38(1): 13-19,26. |
| LI J, ZENG X F, LI P, et al. Visualization review of road traffic safety literature [J]. Journal of Transport Information and Safety, 2020, 38(1): 13-19,26. | |
| 2 | LI S, SHU K, CHEN C, et al. Planning and decision-making for connected autonomous vehicles at road intersections: a review [J]. Chinese Journal of Mechanical Engineering, 2021, 34(1): 1-18. |
| 3 | DRESNER K, STONE P. A multiagent approach to autonomous intersection management [J]. Journal of Artificial Intelligence Research, 2008, 31: 591-656. |
| 4 | YAO H, LI X. Decentralized control of connected automated vehicle trajectories in mixed traffic at an isolated signalized intersection [J]. Transportation Research Part C: Emerging Technologies, 2020, 121: 102846. |
| 5 | 陈一鹤, 孔伟伟, 于杰, 等. 混合交通下非信控交叉口队列预约式控制 [J]. 汽车工程, 2022, 44(7): 953-959,975. |
| CHEN Y H, KONG W W, YU J, et al. Reservation-based vehicle platoon control at unsignalized intersections under mixed traffic condition [J]. Automotive Engineering, 2022, 44(7): 953-959,975. | |
| 6 | 柴琳果, 蔡伯根, 上官伟, 等. 基于间隙理论的智能车交叉口运行控制方法 [J]. 系统仿真学报, 2019, 31(9): 1875-1882. |
| CHAI L G, CAI B G, SHANGGUAN W, et al. Operation control method for connected and autonomous vehicles at intersection [J]. Journal of System Simulation, 2019, 31(9): 1875-1882. | |
| 7 | 陈俊杰, 蔡伯根, 上官伟, 等. 双向双车道超车行为的智能车队间隙控制优化 [J]. 交通运输工程学报, 2019, 19(2): 178-190. |
| CHEN J J, CAI B G, SHANGGUAN W, et al. Slot control optimization of intelligent platoon for dual-lane two-way overtaking behavior [J]. Journal of Traffic and Transportation Engineering, 2019, 19(2): 178-190. | |
| 8 | CHEN C, WANG J, XU Q, et al. Mixed platoon control of automated and human-driven vehicles at a signalized intersection: dynamical analysis and optimal control [J]. Transportation Research Part C: Emerging Technologies, 2021, 127: 103138. |
| 9 | ZHOU F, LI X, MA J. Parsimonious shooting heuristic for trajectory design of connected automated traffic part I: theoretical analysis with generalized time geography [J]. Transportation Research Part B: Methodological, 2017, 95: 394-420. |
| 10 | FENG Y, HEAD K L, KHOSHMAGHAM S, et al. A real-time adaptive signal control in a connected vehicle environment [J]. Transportation Research Part C: Emerging Technologies, 2015, 55: 460-473. |
| 11 | 金立生, 谢宪毅, 司法, 等. 考虑驾驶人特性的智能驾驶路径跟踪算法 [J]. 汽车工程, 2021, 43(4): 553-561. |
| JIN L S, XIE X Y, SI F, et al. Intelligent driving path tracking algorithm considering driver characteristics [J]. Automotive Engineering, 2021, 43(4): 553-561. | |
| 12 | WU B, QIAN L, LU M, et al. Optimal control problem of multi‐vehicle cooperative autonomous parking trajectory planning in a connected vehicle environment [J]. IET Intelligent Transport Systems, 2019, 13(11): 1677-1685. |
| 13 | 李茹, 马育林, 田欢, 等.基于熵值和G1法的自动驾驶车辆综合智能定量评价 [J]. 汽车工程, 2020, 42(10): 1327-1334. |
| LI R, MA Y L, TIAN H, et al. Comprehensive intelligent quantitative evaluation of autonomous vehicle based on entropy and G1 methods [J]. Automotive Engineering, 2020, 42(10): 1327-1334. | |
| 14 | 金辉, 周敏, 李世杰. 基于瞬态修正的车辆燃油消耗模型建模 [J]. 北京理工大学学报, 2017, 37(5): 473-477,484. |
| JIN H, ZHOU M, LI S J. Transient fuel consumption modelling based on transient correction [J]. Transactions of Beijing Institute of Technology, 2017, 37(5): 473-477,484. | |
| 15 | LI B, ZHANG Y, SHAO Z, et al. Simultaneous versus joint computing: a case study of multi-vehicle parking motion planning [J]. Journal of Computational Science, 2017, 20: 30-40. |
| 16 | CHEN J, QIAN L J, XUAN L. Cooperative control of connected hybrid electric vehicles and traffic signals at isolated intersections [J]. IET Intelligent Transport Systems, 2020, 14(13): 1903-1912. |
| 17 | CHEN C, WU B, XUAN L, et al. A discrete control method for the unsignalized intersection based on cooperative grouping [J]. IEEE Transactions on Vehicular Technology, 2022, 71(1): 123-136. |
| 18 | QI X, WANG P, WU G, et al. Connected cooperative ecodriving system considering human driver error [J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2721-2733. |
| 19 | LI B, SHAO Z. A unified motion planning method for parking an autonomous vehicle in the presence of irregularly placed obstacles [J]. Knowledge-Based Systems, 2015, 86: 11-20. |
| [1] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [2] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [3] | Hongchang Zhang,Peng Ning,Jie Yang,Jianwei Song,Lin Hao,Juan Zeng. Parallel Parking Trajectory Planning Based on Double-Layer Solution Strategy [J]. Automotive Engineering, 2023, 45(12): 2299-2309. |
| [4] | Lijun Qian,Chen Chen,Jian Chen,Xinyu Chen,Chi Xiong. Discrete Platoon Control at an Unsignalized Intersection Based on Q-learning Model [J]. Automotive Engineering, 2022, 44(9): 1350-1358. |
| [5] | Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay [J]. Automotive Engineering, 2022, 44(9): 1359-1371. |
| [6] | Wenqin Zhong,Weiwei Kong,Zhiheng Li,Jie Yu,Yugong Luo. Reservation Based Multi-Vehicle Cooperative Control at Traffic-Lightless Intersection Under Different Penetration of Mixed Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1144-1152. |
| [7] | Yihe Chen,Weiwei Kong,Jie Yu,Keqiang Li,Yugong Luo. Reservation-based Vehicle Platoon Control at Unsignalized Intersections Under Mixed Traffic Condition [J]. Automotive Engineering, 2022, 44(7): 953-959. |
| [8] | Bin Tang,Zhanxiang Xu,Haobin Jiang,Yingfeng Cai,Zitian Hu,Zhengyi Yang. Trajectory Planning of Intelligent Vehicles in Lane Change for Collision Avoidance Based on Segmented Optimization [J]. Automotive Engineering, 2022, 44(6): 831-841. |
| [9] | Jiaxing Yu,Arab Aliasghar,Xiaofei Pei,Xuexun Guo. Research on Cornering Trajectory Planning for Intelligent Vehicle Considering Trajectory Smoothness and Stability for Collision Avoidance [J]. Automotive Engineering, 2022, 44(5): 656-663. |
| [10] | Jie Hu,Minchao Zhang,Wencai Xu,Ruinan Chen,Xinkai Zhong,Linglei Zhu. Parallel Parking Trajectory Planning for Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(3): 330-339. |
| [11] | Lijun Qian,Jian Chen,Bing Wu,Liang Xuan,Chen Chen,Liangliang Chen. Eco⁃driving Control for Hybrid Electric Vehicle Platoon with Consideration of Driver Operation Error [J]. Automotive Engineering, 2021, 43(7): 1037-1045. |
| [12] | Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. |
| [13] | Zhijun Gao,Jiangfeng Wang,Lei Chen,Jiakuan Dong,Dongyu Luo,Xuedong Yan. Trajectory Planning Algorithm for CAV at Intersections Based on Dynamic Distance Windows [J]. Automotive Engineering, 2021, 43(4): 537-545. |
| [14] | Jun Liang,Jun Wang,Yunqing Yang,long Chen,Chaofeng Pan,Guangquan Lu. A Connected and Autonomous Vehicle Following Model Based on Generative Adversarial Network [J]. Automotive Engineering, 2021, 43(2): 189-195. |
| [15] | Zhang Jiaxu, Shi Zhengtang, Zhao Jian, Zhu Bing. Optimal Control Strategy Design for Vehicle High-speed Emergency Lane Change Collision Avoidance Based on Radau Pseudospectral Method [J]. Automotive Engineering, 2020, 42(8): 1040-1049. |
|