Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (9): 1359-1371.doi: 10.19562/j.chinasae.qcgc.2022.09.007
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Manjiang Hu1,2,Lingkun Bu1,Hongmao Qin1,2( ),Yan Zhou3,Yougang Bian1,2,Ning Sun1,Xunjia Zheng4
),Yan Zhou3,Yougang Bian1,2,Ning Sun1,Xunjia Zheng4
Received:2021-12-28
Revised:2022-01-26
Online:2022-09-25
Published:2022-09-21
Contact:
Hongmao Qin
E-mail:qinhongmao@vip.sina.com
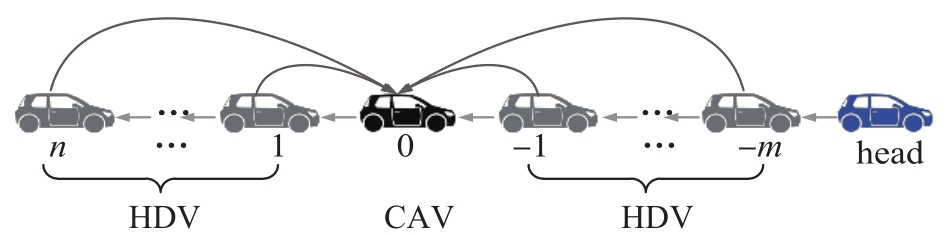
Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay[J].Automotive Engineering, 2022, 44(9): 1359-1371.

"
"

"

"

"


"
"

"
"
"


"

"

"
"

"
| 1 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI K, DAI Y, LI S, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Automotive Safety and Energy, 2017, 8(1): 1-14. | |
| 2 | TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163. |
| 3 | XU B, BAN X J, BIAN Y, et al. Cooperative method of traffic signal optimization and speed control of connected vehicles at isolated intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1390-1403. |
| 4 | LIANG K Y, MÅRTENSSON J, JOHANSSON K H. Heavy-duty vehicle platoon formation for fuel efficiency[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 1051-1061. |
| 5 | BIAN Y, ZHENG Y, REN W, et al. Reducing time headway for platooning of connected vehicles via V2V communication[J]. Transportation Research Part C: Emerging Technologies, 2019, 102: 87-105. |
| 6 | 郑洋. 基于四元素构架的车辆队列动力学建模与分布式控制[D]. 北京:清华大学, 2015. |
| ZHENG Y. Dynamic modeling and distributed control of vehicular platoon under the four-component framework[D]. Beijing: Tsinghua University, 2015. | |
| 7 | ZHENG Y, EBEN LI S, WANG J, et al. Stability and scalability of homogeneous vehicular platoon: study on the influence of information flow topologies[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 14-26. |
| 8 | LI S E, QIN X, LI K, et al. Robustness analysis and controller synthesis of homogeneous vehicular platoons with bounded parameter uncertainty[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 1014-1025. |
| 9 | 秦晓辉, 王建强, 谢伯元, 等. 非匀质车辆队列的分布式控制[J]. 汽车工程, 2017, 39(1): 73-78,106. |
| QIN X, WANG J, XIE B, et al. Distributed control of heterogeneous vehicular platoons[J]. Automotive Engineering, 2017, 39(1): 73-78,106. | |
| 10 | GUO G, LI P, HAO L. Adaptive fault-tolerant control of platoons with guaranteed traffic flow stability[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 6916-6927. |
| 11 | GUO G, LI D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7511-7520. |
| 12 | XU L, ZHUANG W, YIN G, et al. Energy-oriented cruising strategy design of vehicle platoon considering communication delay and disturbance[J]. Transportation Research Part C: Emerging Technologies, 2019, 107: 34-53. |
| 13 | XIAO L, GAO F. Practical string stability of platoon of adaptive cruise control vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194. |
| 14 | 杨泽宇, 黄晋, 胡展溢, 等. 严格避撞的车辆队列分布式鲁棒控制[J]. 汽车工程, 2020, 42(10): 1312-1319. |
| YANG Z, HUANG J, HU Z, et al. Distributed robust control of vehicle platoon for strict collision avoidance[J]. Automotive Engineering, 2020, 42(10): 1312-1319. | |
| 15 | 鲁若宇, 胡杰, 陈瑞楠, 等. 基于DMPC的智能汽车协同式自适应巡航控制[J]. 汽车工程, 2021, 43(8): 1177-1186. |
| LU R, HU J, CHEN R, et al. Cooperative adaptive cruise control of intelligent vehicles based on DMPC [J]. Automotive Engineering, 2021, 43(8): 1177-1186. | |
| 16 | GHASEMI A, KAZEMI R, AZADI S. Stable decentralized control of a platoon of vehicles with heterogeneous information feedback[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4299-4308. |
| 17 | HU J, BHOWMICK P, ARVIN F, et al. Cooperative control of heterogeneous connected vehicle platoons: an adaptive leader-following approach[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 977-984. |
| 18 | 马芳武, 王佳伟, 杨昱, 等. 网联车辆协同编队控制系统研究[J]. 汽车工程, 2020, 42(7): 860-866,873. |
| MA F, WANG J, YANG Y, et al. Research on networked-vehicle cooperative platoon control system[J]. Automotive Engineering, 2020, 42(7): 860-866,873. | |
| 19 | LI K, BIAN Y, LI S, et al. Distributed model predictive control of multi-vehicle systems with switching communication topologies[J]. Transportation Research Part C: Emerging Technologies, 2020, 118: 102717. |
| 20 | BIAN Y, DU C, HU M, et al. Fuel economy optimization for platooning vehicle swarms via distributed economic model predictive control[J]. IEEE Transactions on Automation Science and Engineering, 2021: 1-13. |
| 21 | ZHENG Y, WANG J, LI K. Smoothing traffic flow via control of autonomous vehicles[J]. IEEE Internet of Things Journal, 2020, 7(5): 3882-3896. |
| 22 | 胡笳, 安连华, 李欣. 面向新型混合交通流的快速路合流区通行能力建模[J]. 交通信息与安全, 2021, 39(1): 137-144. |
| HU J, AN L, LI X. A capacity model of freeway merging areas with partially connected automated traffic[J]. Journal of Transport Information and Safety, 2021, 39(1): 137-144. | |
| 23 | 李永福, 邬昌强, 朱浩, 等. 考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制[J]. 自动化学报, 2021, 47(9): 2264-2275. |
| LI Y, WU C, ZHU H, et al. Trajectory tracking control for connected vehicle platoon considering car-following interactions and time delays[J]. Acta Automatica Sinica, 2021, 47(9): 2264-2275. | |
| 24 | 李永福, 何昌鹏, 朱浩, 等. 通信延时环境下异质网联车辆队列非线性纵向控制[J]. 自动化学报, 2021, 47(12): 2841-2856. |
| LI Y, HE C, ZHU H, et al. Nonlinear longitudinal control for heterogeneous connected vehicle platoon in the presence of communication delays[J]. Acta Automatica Sinica, 2021, 47(12): 2841-2856. | |
| 25 | 杨依琳, 边有钢, 胡满江, 等. 混合交通环境车辆队列协同控制[J]. 控制与信息技术, 2021(1): 9-16. |
| YANG Y, BIAN Y, HU M, et al. Cooperative control of vehicular platoon in mixed traffic environment[J]. Control and Information Technology, 2021(1): 9-16. | |
| 26 | DI BERNARDO M, SALVI A, SANTINI S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 102-112. |
| 27 | WU C, LI Y, LI Y. Trajectory tracking control for connected vehicle platoon considering time delays[C]. 2018 Chinese Automation Congress (CAC). |
| 28 | GE J I, OROSZ G. Optimal control of connected vehicle systems with communication delay and driver reaction time[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(8): 2056-2070. |
| 29 | GAO F, LI S E, ZHENG Y, et al. Robust control of heterogeneous vehicular platoon with uncertain dynamics and communication delay[J]. IET Intelligent Transport Systems, 2016, 10(7): 503-513. |
| 30 | ELAHI A, ALFI A, MODARES H. H∞ consensus control of discrete-time multi-agent systems under network imperfections and external disturbance[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(3): 667-675. |
| 31 | CUI S, SEIBOLD B, STERN R, et al. Stabilizing traffic flow via a single autonomous vehicle: possibilities and limitations[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). |
| 32 | ZHANG J, KNOSPE C R, TSIOTRAS P. New results for the analysis of linear systems with time-invariant delays[J]. International Journal of Robust and Nonlinear Control, 2003, 13(12): 1149-1175. |
| 33 | WANG J, ZHENG Y, CHEN C, et al. Leading cruise control in mixed traffic flow: system modeling, controllability, and string stability[J]. arXiv e-prints, 2020: arXiv:. |
| [1] | Jizheng Liu,Zhenpo Wang,Fengchun Sun,Lei Zhang. Research on Delay Compensation Control for Heterogeneous Connected and Automated Vehicle Platoons [J]. Automotive Engineering, 2023, 45(9): 1573-1582. |
| [2] | Lijun Qian,Chen Chen,Jian Chen. Centralized Trajectory Planning in an Unsignalized Intersection Environment Considering Driver Error [J]. Automotive Engineering, 2023, 45(5): 768-776. |
| [3] | Yunpeng Wei,Liyun Fan,Hanwen Zhang,Bo Li,Yuanqi Gu,Xianyin Leng. Experimental Research on Influence of Pressure Fluctuation on Nozzle Flow and Near Field Spray Under Multiple Injections [J]. Automotive Engineering, 2023, 45(5): 836-844. |
| [4] | Wenqin Zhong,Weiwei Kong,Zhiheng Li,Jie Yu,Yugong Luo. Reservation Based Multi-Vehicle Cooperative Control at Traffic-Lightless Intersection Under Different Penetration of Mixed Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1144-1152. |
| [5] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |
| [6] | Yihe Chen,Weiwei Kong,Jie Yu,Keqiang Li,Yugong Luo. Reservation-based Vehicle Platoon Control at Unsignalized Intersections Under Mixed Traffic Condition [J]. Automotive Engineering, 2022, 44(7): 953-959. |
| [7] | Fei Zhao,Jian Wang,Tianlei Zhang,Li Wang,Deyi Li. Model Predictive Control Method for Vehicle Platoon Under Cloud Control Scenes [J]. Automotive Engineering, 2022, 44(2): 179-189. |
| [8] | Xiujian Yang,Xinyu Yin,Jin Gao. Interference Suppression Characteristics of Vehicle Platoon with Periodic Type Control Structure [J]. Automotive Engineering, 2022, 44(12): 1834-1843. |
| [9] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [10] | Lijun Qian,Jian Chen,Bing Wu,Liang Xuan,Chen Chen,Liangliang Chen. Eco⁃driving Control for Hybrid Electric Vehicle Platoon with Consideration of Driver Operation Error [J]. Automotive Engineering, 2021, 43(7): 1037-1045. |
| [11] | Yang Liu,Changfu Zong,Hongyu Zheng,Xiaojian Han,Dong Zhang,Kaku Chuyo. Two⁃dimensional Tracking Control Algorithm for Vehicle Platoon Based on Reference Vector Field [J]. Automotive Engineering, 2021, 43(7): 962-970. |
| [12] | Haichao Zhou,Qi Xia,Guolin Wang,Jian Yang,Shupei Zhang,Changda Li. Experimental Study on the Relationship Between Tire Cavity Resonance Noise and Tire Force Transmissibility [J]. Automotive Engineering, 2021, 43(3): 429-436. |
| [13] | Jun Liang,Jun Wang,Yunqing Yang,long Chen,Chaofeng Pan,Guangquan Lu. A Connected and Autonomous Vehicle Following Model Based on Generative Adversarial Network [J]. Automotive Engineering, 2021, 43(2): 189-195. |
| [14] | Xiangmo Zhao,Xinrui Zhang,Runmin Wang,Zhigang Xu,Haijin Fan. Cooperative Optimization Control Method of Traffic Signals and Vehicle Trajectories at Connected Intersection [J]. Automotive Engineering, 2021, 43(11): 1577-1586. |
| [15] | Dai Wentong, Li Qiliang, Li Zhuoming, Chang Yifei, Yang Zhigang. Investigation into Bonnet Aerodynamic Characteristics of Follower Vehicle in Two-vehicle Platoon at Different Reynolds Numbers [J]. Automotive Engineering, 2020, 42(5): 593-599. |