Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (2): 179-189.doi: 10.19562/j.chinasae.qcgc.2022.02.004
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Fei Zhao1,Jian Wang1,Tianlei Zhang1,2,Li Wang2( ),Deyi Li1,3
),Deyi Li1,3
Received:2021-09-06
Revised:2021-11-04
Online:2022-02-25
Published:2022-02-24
Contact:
Li Wang
E-mail:82182313@qq.com
Fei Zhao,Jian Wang,Tianlei Zhang,Li Wang,Deyi Li. Model Predictive Control Method for Vehicle Platoon Under Cloud Control Scenes[J].Automotive Engineering, 2022, 44(2): 179-189.
"

"


"

"


"

"

"

"

"

"

"

"

"
"
"

"

"
"

"

"

"

"
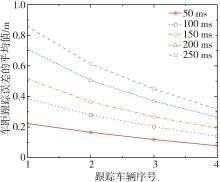
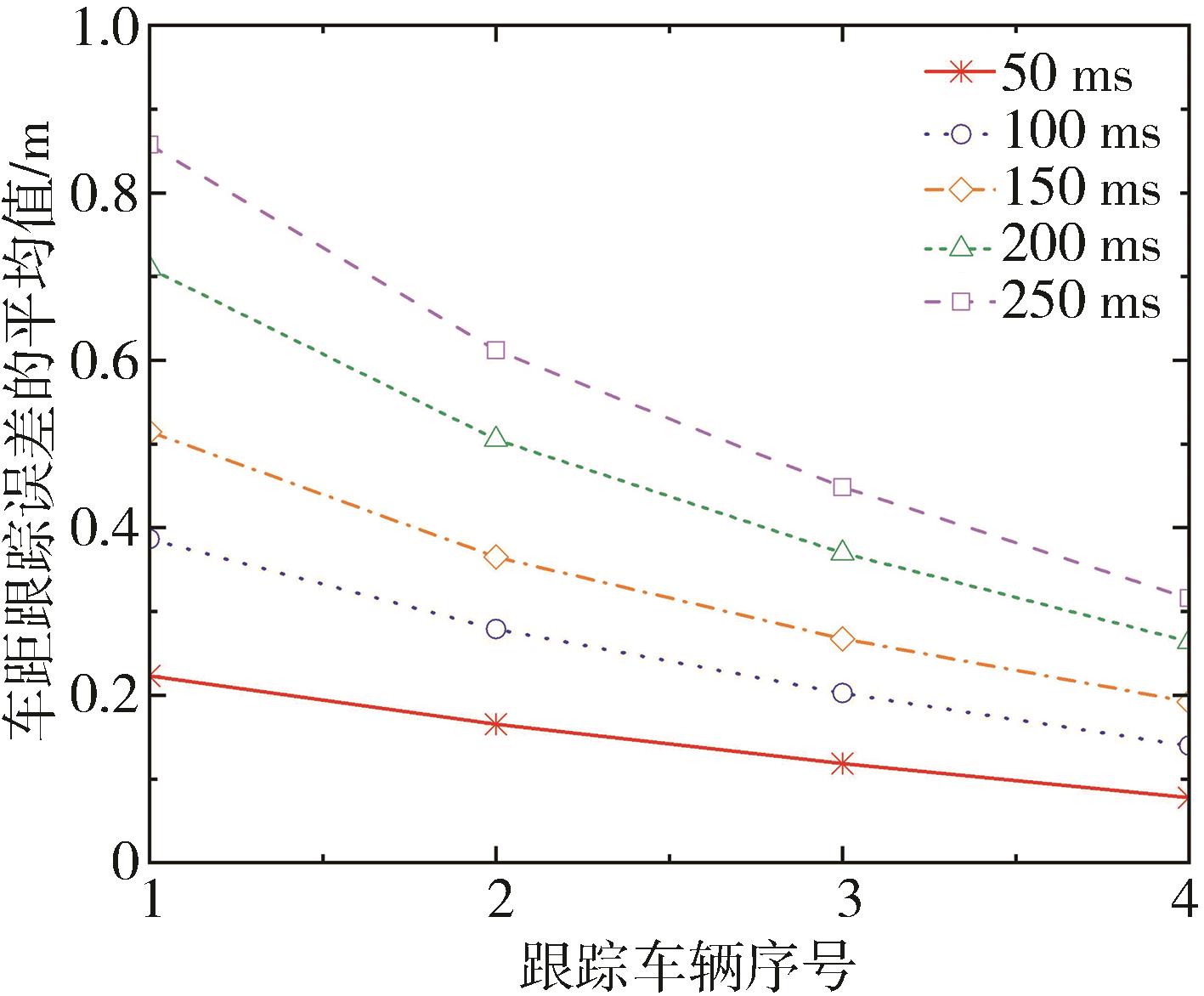
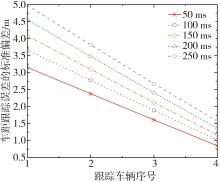
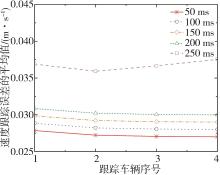
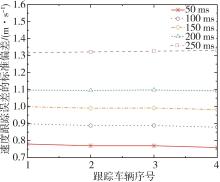
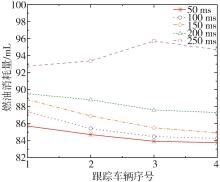
| 时延/ms | 车距误差/m | 速度误差/(m·s-1) | 油耗总量/mL |
|---|---|---|---|
| 50 | 0.146 | 0.027 | 418.1 |
| 100 | 0.252 | 0.028 | 421.6 |
| 150 | 0.334 | 0.028 | 426.2 |
| 200 | 0.462 | 0.030 | 433.2 |
| 250 | 456.6 |
| 1 | CASTRITIUS S M, HECHT H, MÖLLER J, et al. Acceptance of truck platooning by professional drivers on German highways. a mixed methods approach[J]. Applied Ergonomics, 2020, 85:103042. |
| 2 | GONG S, SHEN J, DU L. Constrained optimization and distributed computation based car following control of a connected and autonomous vehicle platoon[J]. Transportation Research Part B: Methodological, 2016, 94: 314-334. |
| 3 | XIAO L, GAO F. Practical string stability of platoon of adaptive cruise control vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194. |
| 4 | MILANÉS V, SHLADOVER S E, SPRING J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305. |
| 5 | DENG Q. A general simulation framework for modeling and analysis of heavy-duty vehicle platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11): 3252-3262. |
| 6 | YU K, YANG H, TAN X, et al. Model predictive control for hybrid electric vehicle platooning using slope information[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 1894-1909. |
| 7 | 王雪彤, 罗禹贡, 江发潮, 等. 纯电动商用车异质队列的多目标控制[J]. 汽车工程, 2020, 42(4): 505-512. |
| WANG X, LUO Y, JIANG F, et al. Multi-target control for heterogeneous platoon of battery electric commercial vehicle[J]. Automotive Engineering, 2020, 42(4):505-512. | |
| 8 | HE D, QIU T, LUO R. Fuel efficiency-oriented platooning control of connected nonlinear vehicles: a distributed economic MPC approach[J]. Asian Journal of Control, 2020, 22(4):1628-1638. |
| 9 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| 10 | 李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12): 1595-1605. |
| LI K, CHANG X, LI J, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020, 42(12): 1595-1605. | |
| 11 | 许庆, 潘济安, 李克强, 等. 不可靠通信的云控场景下网联车辆控制器的设计[J]. 汽车工程, 2021, 43(4): 527-536. |
| XU Q, PAN J, LI K, et al. Design of connected vehicle controller under cloud control scenes with unreliable communication[J]. Automotive Engineering, 2021, 43(4): 527-536. | |
| 12 | WU Q, WAN Z, FAN Q, et al. Velocity-adaptive access scheme for MEC-assisted platooning networks: access fairness via data freshness[J]. IEEE Internet of Things Journal, 2021, doi: 10.1109/JIOT.2021.3103325. |
| 13 | HUANG R, CHANG B, TSAI Y, et al. Mobile edge computing-based vehicular cloud of cooperative adaptive driving for platooning autonomous self driving[C]. IEEE 7th International Symposium on Cloud and Service Computing, 2017: 32-39. |
| 14 | VIRDIS A, NARDINI G, STEA G. A framework for MEC-enabled platooning[C]. IEEE Wireless Communications and Networking Conference Workshop, 2019: 1-6. |
| 15 | QUADRI C, MANCUSO V, MARSAN M A, et al. Platooning on the edge[C]. Proceedings of the 23rd International ACM Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, 2020:1-10. |
| 16 | 成静静, 赖卫华. 基于5G边缘云技术构建智能车联方案研究[J]. 数据通信, 2021(3): 1-3, 9. |
| CHENG J, LAI W. Study on building the solution of intelligent and connected vehicles based on 5G MEC technology [J]. Data Communications, 2021(3): 1-3, 9. | |
| 17 | 樊卫华, 蔡骅, 陈庆伟, 等. 时延网络控制系统的稳定性[J]. 控制理论与应用, 2004, 21(6):33-37. |
| FAN W, CAI H, CHEN Q. Stability of networked control systems with time-delay[J]. Control Theory & Applications, 2004, 21(6) :880-884. | |
| 18 | HAO Z, SAIGAL R, DION F, et al. Vehicle platoon control in high-latency wireless communications environment: model predictive control method[J]. Transportation Research Record: Journal of the Transportation Research Board, 2012, 2324(1):81-90. |
| [1] | Jizheng Liu,Zhenpo Wang,Fengchun Sun,Lei Zhang. Research on Delay Compensation Control for Heterogeneous Connected and Automated Vehicle Platoons [J]. Automotive Engineering, 2023, 45(9): 1573-1582. |
| [2] | Run Mei,Duanfeng Chu,Bolin Gao,Keqiang Li,Wei Cong,Chaoyi Chen. Predictive Cruise and Lane-Changing Decision for Platoon Based on Cloud Control System [J]. Automotive Engineering, 2023, 45(8): 1299-1308. |
| [3] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [4] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [5] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [6] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [7] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [8] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [9] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [10] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [11] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [12] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [13] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [14] | Yong Lu,Yichao He,He Tian,Kun Jiang,Diange Yang. Research on Longitudinal Acceleration Planning Method of Adaptive Cruise Control System for Mass Production [J]. Automotive Engineering, 2023, 45(10): 1803-1814. |
| [15] | Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay [J]. Automotive Engineering, 2022, 44(9): 1359-1371. |
|